TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071702
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2023182102
出願日
2023-10-23
発明の名称
箱体把持装置、および、箱体把持方法
出願人
智頭電機株式会社
代理人
個人
主分類
B25J
15/00 20060101AFI20250428BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
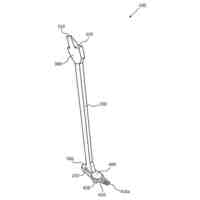
【課題】箱体が多数山積みになっており箱体の一辺に対向する対向辺が隣り合う別の箱体に当接している場合でも当該箱体を保持することのできる箱体把持装置および箱体把持方法を提供する。
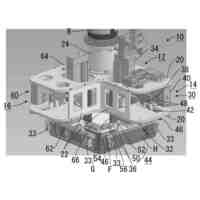
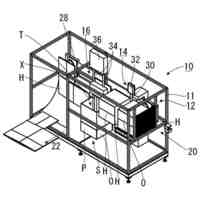
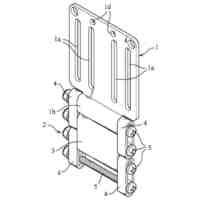
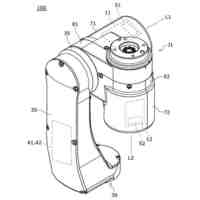
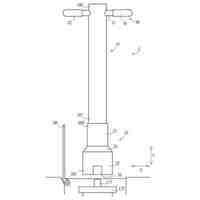
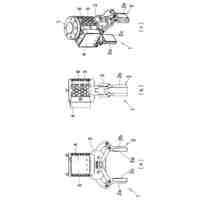
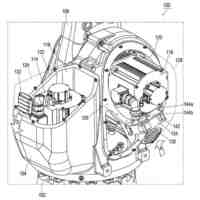
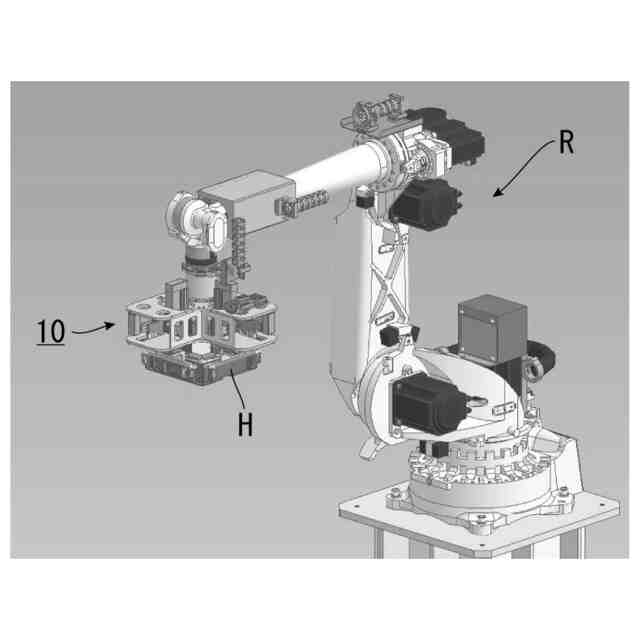
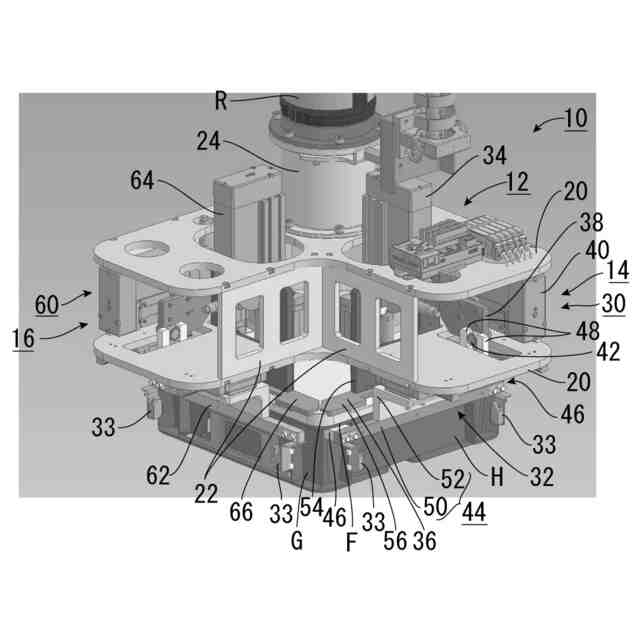
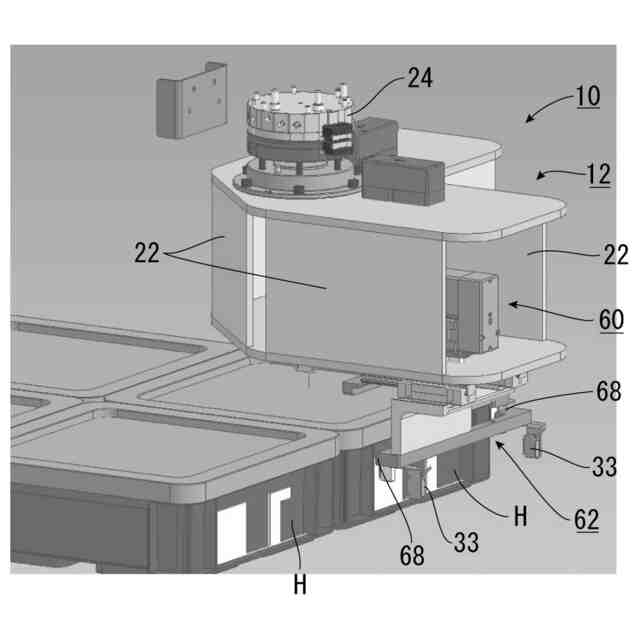
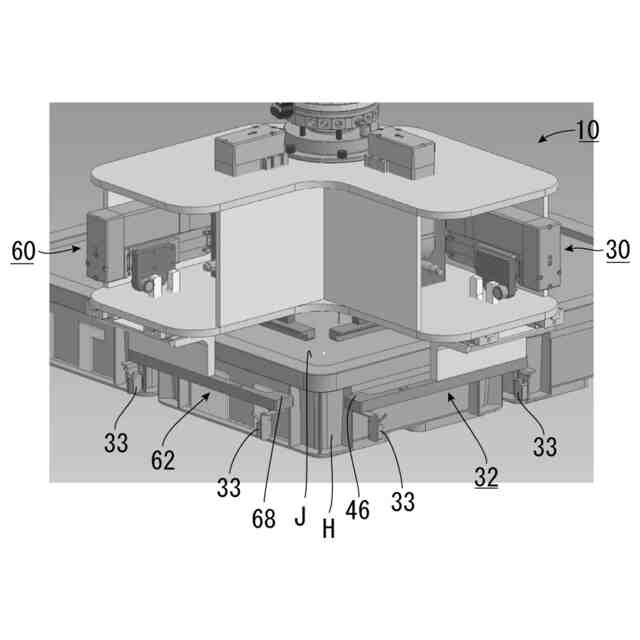
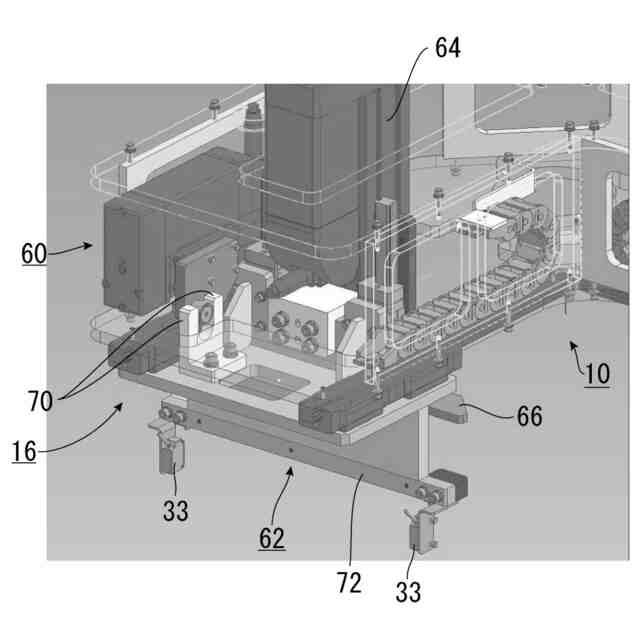
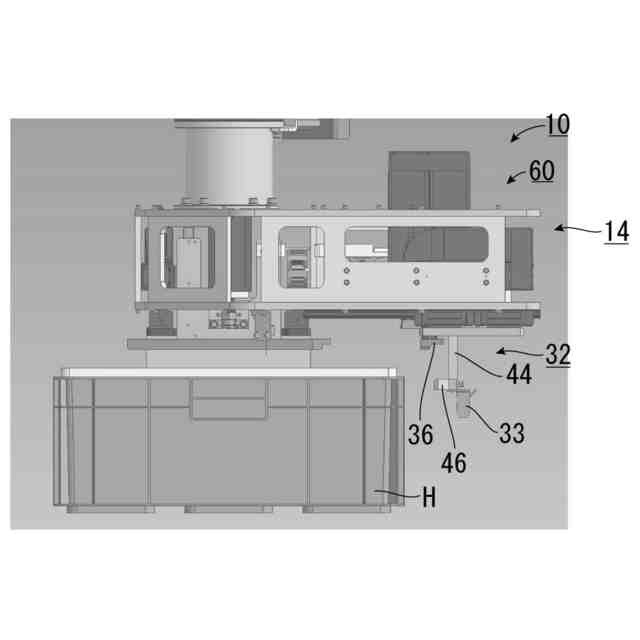
【解決手段】箱体把持装置10を、箱体Hの一辺にあるフランジ部Fを把持する第1把持部14と、当該一辺に続く別の辺にある別のフランジ部Fを把持する第2把持部16とで構成する。第1把持部14および第2把持部16は、それぞれ、フランジ部Fを下方から支える支持部32,62と、フランジ部Fを上方から押圧する押圧部36,66とを有している。
【選択図】図2
特許請求の範囲
【請求項1】
箱体の一辺にあるフランジ部を把持する第1把持部と、
前記一辺に続く別の辺にある別のフランジ部を把持する第2把持部とを備えており、
前記第1把持部および前記第2把持部は、それぞれ、
前記フランジ部を下方から支える支持部と、
前記フランジ部を上方から押圧する押圧部とを有している
箱体把持装置。
続きを表示(約 640 文字)
【請求項2】
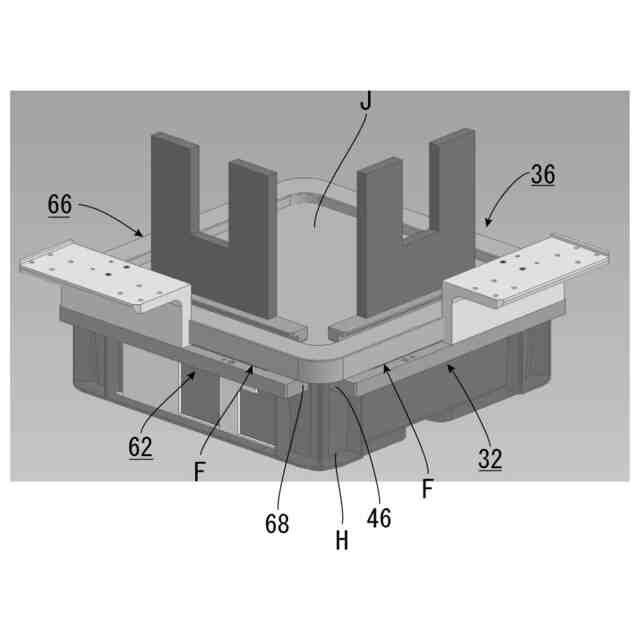
前記支持部は、
本体部と、
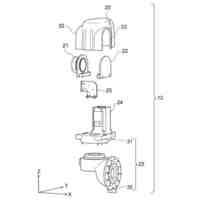
前記本体部から前記箱体に向けて水平方向に突設された一対の突設部とを有しており、
一対の前記突設部の上側で前記フランジ部を下方から支えるようになっている
請求項1に記載の箱体把持装置。
【請求項3】
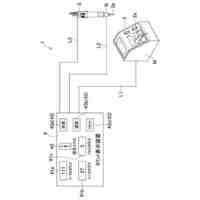
前記箱体に対する前記支持部および前記押圧部の向きを調節するために前記箱体との距離を測定する距離センサーが前記各突設部の近傍にそれぞれ設けられている
請求項1に記載の箱体把持装置。
【請求項4】
箱体の一辺にあるフランジ部を第1把持部で把持するとともに、
前記一辺に続く別の辺にある別のフランジ部を第2把持部で把持する箱体把持方法であって、
前記第1把持部および前記第2把持部は、それぞれ、
前記フランジ部を下方から支える支持部と、前記フランジ部を上方から押圧する押圧部とで前記フランジ部を把持する
箱体把持方法。
【請求項5】
前記支持部の本体部から前記箱体に向けて水平方向に突設された一対の突設部の上側で前記フランジ部を下方から支えるようになっている
請求項4に記載の箱体把持方法。
【請求項6】
前記各突設部の近傍に設けられた距離センサーによって測定された前記箱体との距離に基づいて、前記箱体に対する前記支持部および前記押圧部の向きが調整される
請求項4に記載の箱体把持方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、フランジ部(出張り部)を有する箱体を把持する箱体把持装置、および、箱体把持方法に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
現在までに、部品、食品、家電製品、家具等を収容する部材として、フランジ部(出張り部)を有する箱体が広く使用されている。
【0003】
近年、工場内等での省力化が強く求められており、箱体のハンドリングをロボットで行いたいという要望が非常に増加している。
【0004】
このため、箱体のハンドリングを行うロボットについては多様なものが開発されている(例えば、特許文献1)。
【0005】
ところで、箱体の中には、その上端部全周から水平方向に延びるフランジ部(出張り部)を有するものがあり、そのような箱体をロボットが把持するのに特化して開発された箱体把持装置も数多く開発されている。
【先行技術文献】
【特許文献】
【0006】
特開2000-313522号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
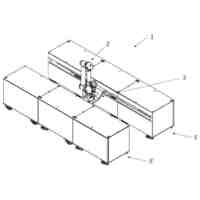
しかしながら、従前の箱体把持装置は平面視矩形状の箱体の一辺とこれに対向する対向辺とを把持するようになっており、これら箱体が多数山積みになっており対向辺が隣り合う別の箱体の一辺に当接している場合には、対向辺を保持できないことから箱体を把持できないケースがあった。
【0008】
本発明は、かかる問題を解決するためになされたものであり、その目的は、箱体が多数山積みになっており箱体の一辺に対向する対向辺が隣り合う別の箱体に当接している場合でも当該箱体を保持することのできる箱体把持装置および箱体把持方法を提供することにある。
【課題を解決するための手段】
【0009】
この発明のある局面に従うと、
箱体の一辺にあるフランジ部を把持する第1把持部と、
前記一辺に続く別の辺にある別のフランジ部を把持する第2把持部とを備えており、
前記第1把持部および前記第2把持部は、それぞれ、
前記フランジ部を下方から支える支持部と、
前記フランジ部を上方から押圧する押圧部とを有している
箱体把持装置が提供される。
【0010】
好適には、
前記支持部は、
本体部と、
前記本体部から前記箱体に向けて水平方向に突設された一対の突設部とを有しており、
一対の前記突設部の上側で前記フランジ部を下方から支えるようになっている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
智頭電機株式会社
箱体把持装置、および、箱体把持方法
3日前
智頭電機株式会社
箱体折畳装置、および、箱体折畳方法
4か月前
OMC株式会社
ロボット
24日前
株式会社クレスコ
補助吸着具
17日前
株式会社不二越
ロボット
9日前
株式会社不二越
ロボット
1か月前
株式会社不二越
ロボット操作装置
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
24日前
川崎重工業株式会社
ロボット
1か月前
株式会社デンソー
操縦桿
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
工機ホールディングス株式会社
作業機
1か月前
個人
バール
1か月前
住友重機械工業株式会社
ロボット
3日前
株式会社イノウ
給油口キャップ用開閉具
10日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
川崎重工業株式会社
制動システム
9日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
株式会社不二越
垂直多関節ロボット
10日前
アイホン株式会社
ネジ締めカウントシステム
11日前
芝浦機械株式会社
双腕ロボット
2日前
パナソニック株式会社
工具
10日前
パナソニック株式会社
工具
10日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
学校法人法政大学
装着型アシスト装置
1か月前
株式会社マキタ
作業機
1か月前
住友重機械工業株式会社
ロボット及びカバー
3日前
若井ホールディングス株式会社
レンチ構造とその製造方法
1か月前
アピュアン株式会社
エアー式衝撃工具
27日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社マキタ
打ち込み工具
11日前
住友重機械工業株式会社
アクチュエータ支持部材
2日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
3日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社マキタ
インパクト工具
25日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ