TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025074204
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2025031824,2020161059
出願日
2025-02-28,2020-09-25
発明の名称
作業機械
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/26 20060101AFI20250502BHJP(水工;基礎;土砂の移送)
要約
【課題】検出対象の位置を精度よく検出することが可能な作業機械を提供する。
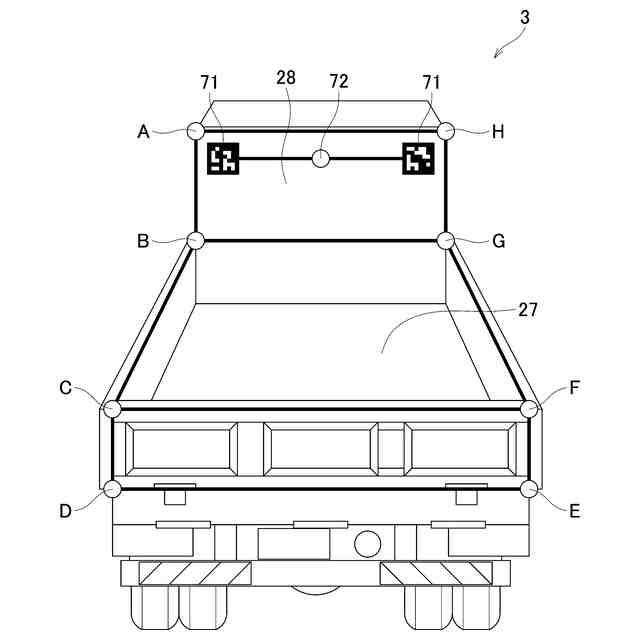
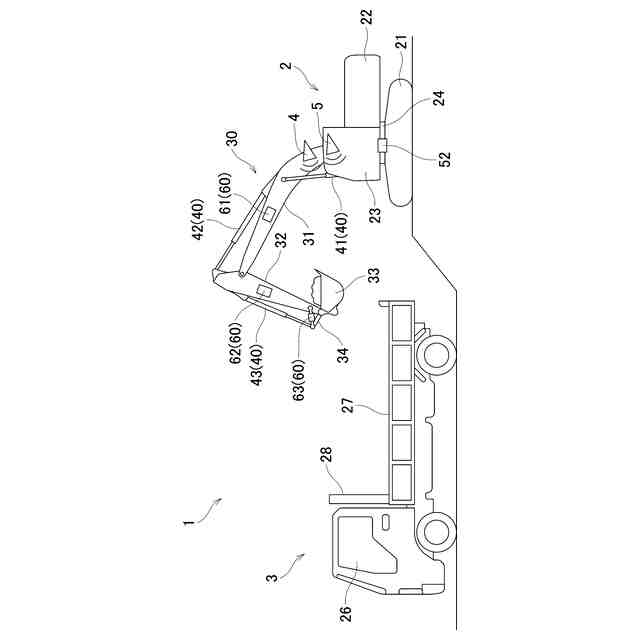
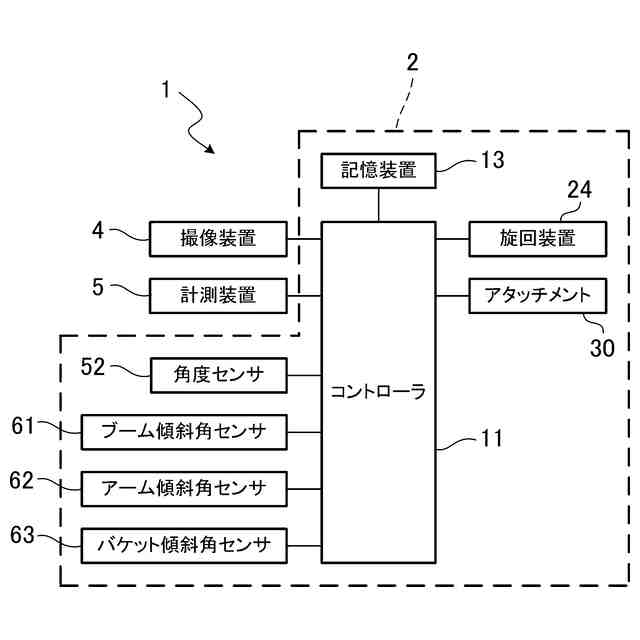
【解決手段】撮像装置4は、位置および姿勢を外部から取得させることが可能な目印71が含まれるように検出対象(27)を撮像する。取得手段(11)は、撮像された画像における目印71の外観から、撮像装置4に対する目印71の位置および姿勢を取得する。記憶装置13は、検出対象(27)の三次元形状の情報を記憶する。算出手段(11)は、取得された目印71の位置および姿勢と、記憶された検出対象(27)の三次元形状の情報とに基づいて、検出対象(27)の三次元形状の位置および姿勢を算出する。
【選択図】図2
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体の上部に旋回可能に取り付けられる上部旋回体と、
前記上部旋回体に回動可能に取り付けられるアタッチメントと、
検出対象に設けられる目印であって、位置および姿勢を外部から取得させることが可能な前記目印が含まれるように前記検出対象を撮像する撮像装置と、
撮像された画像における前記目印の外観から、前記撮像装置に対する前記目印の位置および姿勢を取得する取得手段と、
前記検出対象の三次元形状の情報を記憶する記憶装置と、
取得された前記目印の位置および姿勢と、記憶された前記検出対象の前記三次元形状の情報とに基づいて、前記検出対象の前記三次元形状の位置および姿勢を算出する算出手段と、
を有することを特徴とする作業機械。
続きを表示(約 980 文字)
【請求項2】
前記検出対象は、前記アタッチメントから運搬物が投下される投下位置の周囲の側壁である
ことを特徴とする請求項1に記載の作業機械。
【請求項3】
複数の前記目印が前記検出対象に設けられており、
取得された前記目印の各々の位置から、前記検出対象に関連付けられた特定位置の位置および姿勢を算出する特定位置算出手段を有し、
前記算出手段は、算出された前記特定位置の位置および姿勢と、記憶された前記検出対象の前記三次元形状の情報とに基づいて、前記検出対象の前記三次元形状の位置および姿勢を算出する
ことを特徴とする請求項1または2に記載の作業機械。
【請求項4】
前記特定位置は、2つの前記目印を結ぶ直線の中点である、
ことを特徴とする請求項3に記載の作業機械。
【請求項5】
前記取得手段が、複数の前記目印の一部の位置を取得できなかった場合に、取得された前記目印の位置および姿勢から、前記特定位置の位置および姿勢を推定する推定手段を有し、
前記算出手段は、推定された前記特定位置の位置および姿勢と、記憶された前記検出対象の前記三次元形状の情報とに基づいて、前記検出対象の前記三次元形状の位置および姿勢を算出する
ことを特徴とする請求項3または4に記載の作業機械。
【請求項6】
前記検出対象の位置情報であって前記特定位置に対応する特定位置対応部位の位置情報を計測する計測装置と、
計測された前記特定位置対応部位の位置情報に基づいて、前記特定位置の位置を補正する補正手段と、を有する
ことを特徴とする請求項3~5のいずれか1項に記載の作業機械。
【請求項7】
前記検出対象の種類毎に前記目印が異なっており、
前記記憶装置は、複数種類の前記検出対象の各々の前記三次元形状の情報を記憶しており、
撮像された前記目印から、前記検出対象の種類を特定する特定手段を有し、
前記算出手段は、特定された種類の前記検出対象の前記三次元形状の情報に基づいて、前記検出対象の前記三次元形状の位置および姿勢を算出する
ことを特徴とする請求項1~6のいずれか1項に記載の作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、検出対象の位置を検出する、作業機械に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1に開示されているように、作業機械が保持した運搬物(土砂など)が投下される投下対象(ダンプトラックなど)の撮像画像を取得し、学習済みモデルである位置特定モデルと撮像画像とに基づいて、画像に写る投下対象における検出対象(荷台など)の位置を特定することが行われている。
【先行技術文献】
【特許文献】
【0003】
特開2020-35380号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、学習済みモデルを用いた画像認識で、検出対象の位置を特定するのは、正確性に欠ける。
【0005】
本発明の目的は、検出対象の位置を精度よく検出することが可能な位置検出システムを提供することである。
【課題を解決するための手段】
【0006】
本発明は、作業機械に対する検出対象の位置を検出する、位置検出システムであって、前記検出対象に設けられ、位置および姿勢を外部から取得させることが可能な目印と、前記目印が含まれるように前記検出対象を撮像する撮像装置と、撮像された前記目印から、前記目印の位置および姿勢を取得する取得手段と、前記検出対象の三次元形状の情報を記憶する記憶装置と、取得された前記目印の位置および姿勢と、記憶された前記検出対象の三次元形状の情報とに基づいて、前記検出対象の位置および姿勢を算出する算出手段と、を有することを特徴とする。
【発明の効果】
【0007】
本発明によると、撮像された目印から取得された、目印の位置および姿勢と、記憶装置に記憶された検出対象の三次元形状の情報とに基づいて、検出対象の位置および姿勢が算出される。これにより、検出対象の位置を精度よく検出することができる。よって、例えば、検出対象に運搬物を投下するように作業機械を操作するオペレータのアシストや、検出対象に運搬物を投下するように動作する作業機械の自動運転などを、高精度に行うことができる。
【図面の簡単な説明】
【0008】
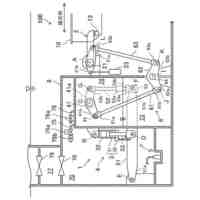
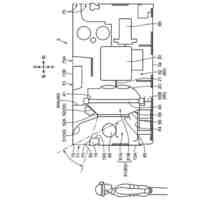
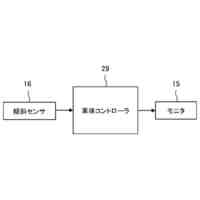
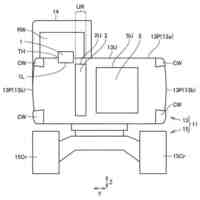
位置検出システムの構成図である。
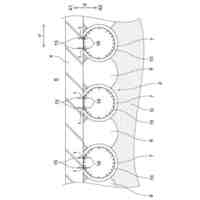
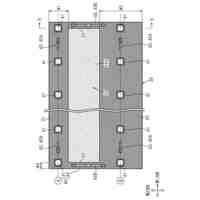
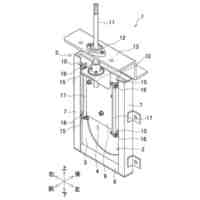
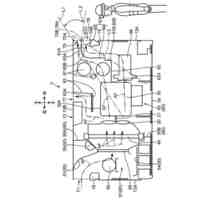
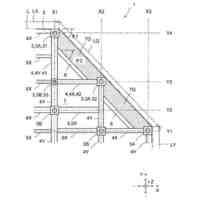
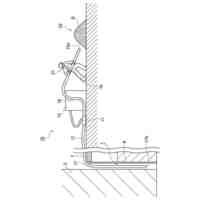
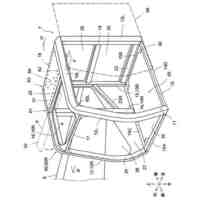
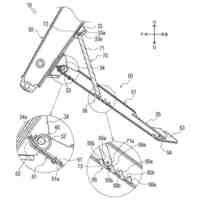
作業機械側からダンプトラックを見た斜視図である。
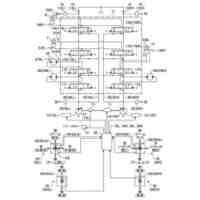
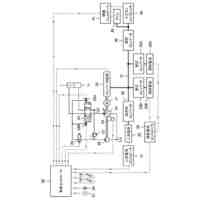
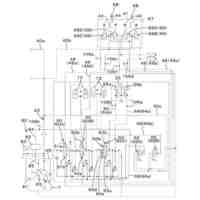
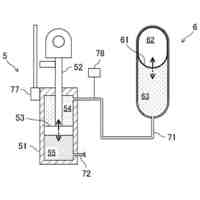
位置検出システムの回路図である。
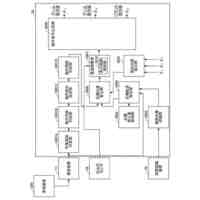
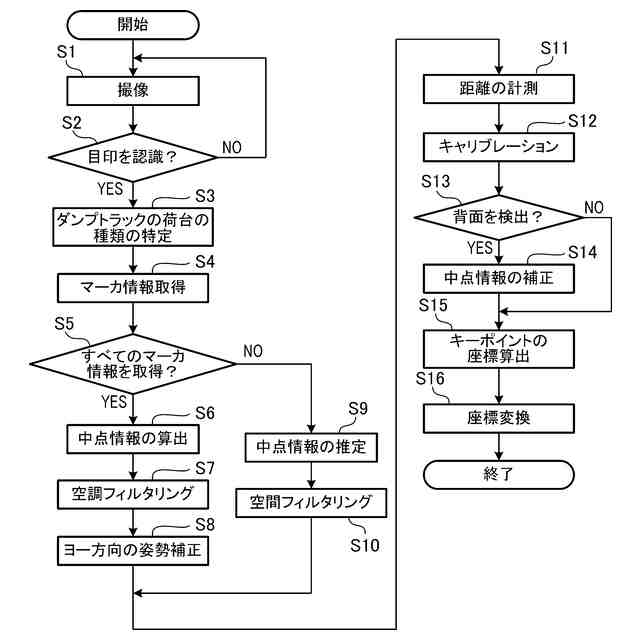
位置検出処理のフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の好適な実施の形態について、図面を参照しつつ説明する。
【0010】
(位置検出システムの構成)
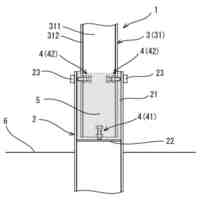
本実施形態による位置検出システムは、作業機械に対する検出対象の位置を検出するものである。位置検出システム1の構成図である図1に示すように、位置検出システム1は、作業機械2と、ダンプトラック3と、撮像装置4と、計測装置5と、を有している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
長尺平板パネル
1か月前
個人
透過型堰堤
17日前
個人
構造物の検査方法
1か月前
株式会社東部
多翼型鋼管杭
1か月前
鹿島建設株式会社
鉄筋かご
15日前
個人
津波防御三段壁浮上システム。
23日前
株式会社竹中工務店
壁接合工法
3日前
カナデビア株式会社
起伏ゲート
1か月前
中部電力株式会社
沈砂池
15日前
株式会社大林組
基礎構造
1か月前
住友建機株式会社
ショベル
2日前
株式会社エコ・プランナー
取水装置
2日前
日本車輌製造株式会社
杭打機
1か月前
コベルコ建機株式会社
作業機械
15日前
中部美化企業株式会社
水門装置
9日前
コベルコ建機株式会社
作業機械
15日前
コベルコ建機株式会社
作業機械
15日前
日立建機株式会社
作業機械
1か月前
株式会社奥村組
建物の基礎構造
9日前
日立建機株式会社
建設機械
1か月前
株式会社クボタ
作業機
1か月前
コベルコ建機株式会社
操作装置
3日前
カナデビア株式会社
浮体構造体
23日前
株式会社ダイトー
護岸コンクリートの補修構造
2日前
住友重機械工業株式会社
作業機械
2日前
鹿島建設株式会社
埋戻し方法
23日前
東陽商事株式会社
スイベルの共回り防止装置
17日前
個人
大規模真空沸騰圧密工法と大深度気水分離タンク
2日前
構法開発株式会社
埋込継手構造
1か月前
カナデビア株式会社
係留装置及びその制御方法
1か月前
プレス工業株式会社
建設機械のキャビン
15日前
株式会社竹内製作所
土砂侵入防止構造
9日前
株式会社小松製作所
作業車両
4日前
株式会社小松製作所
作業機械
4日前
株式会社クボタ
フロントローダ及び作業車両
1か月前
株式会社SEELS
フェンダー用カバー部材
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ