TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025075716
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023187088
出願日
2023-10-31
発明の名称
作業機械
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/20 20060101AFI20250508BHJP(水工;基礎;土砂の移送)
要約
【課題】目標軌道に沿って作業具を移動させる際の作業効率を向上させる。
【解決手段】本開示の一態様に係る作業機械は、下部走行体と、前記下部走行体に旋回自在の搭載される上部旋回体と、前記上部旋回体に取り付けられるアタッチメントと、前記アタッチメントの先端に設けられる作業具と、前記作業具の目標軌道を設定し、前記作業具が前記目標軌道に従うように前記作業具及び前記アタッチメントの動作を制御するように構成されている制御装置と、前記作業具に係る負荷に関する情報を検出する検出部と、を備え、前記制御装置は、前記目標軌道に従うように前記動作の制御を行う際に、前記負荷に関する情報に基づいて、前記作業具が移動する速度を調整するように構成されている。
【選択図】図7
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体に旋回自在の搭載される上部旋回体と、
前記上部旋回体に取り付けられるアタッチメントと、
前記アタッチメントの先端に設けられる作業具と、
前記作業具の目標軌道を設定し、前記作業具が前記目標軌道に従うように前記作業具及び前記アタッチメントの動作を制御するように構成されている制御装置と、
前記作業具に係る負荷に関する情報を検出する検出部と、を備え、
前記制御装置は、前記目標軌道に従うように前記動作の制御を行う際に、前記負荷に関する情報に基づいて、前記作業具が移動する速度を調整するように構成されている、
作業機械。
続きを表示(約 790 文字)
【請求項2】
油圧ポンプと、
前記油圧ポンプから吐出される作動油で、前記作業具及び前記アタッチメントのうちいずれか一つ以上を駆動させる油圧アクチュエータと、を備え、
前記制御装置は、前記負荷に関する情報に基づいて、前記油圧ポンプからの吐出流量を推定し、当該吐出流量の減少度合いに基づいて、前記作業具及び前記アタッチメントのうちいずれか一つ以上の速度を減少させるように構成されている、
請求項1に記載の作業機械。
【請求項3】
前記検出部は、前記油圧ポンプの圧力を検出し、
前記制御装置は、前記圧力に基づいて、前記油圧ポンプからの前記吐出流量を推定する、
請求項2に記載の作業機械。
【請求項4】
前記制御装置は、前記目標軌道と共に、前記作業具が前記目標軌道に沿って移動する際の目標速度を設定し、
前記目標軌道と、前記作業具の施工対象の形状と、前記目標速度と、に基づいて、前記目標軌道に沿って前記目標速度で前記作業具を動作させた場合の負荷に関する情報を算出し、
算出された前記負荷に関する情報に基づいて、前記目標速度を調整するように構成されている、
請求項1に記載の作業機械。
【請求項5】
前記制御装置は、前記目標軌道及び前記目標速度に従うように前記動作の制御を行っている間、前記検出部により検出された負荷に関する情報と、算出された前記負荷に関する情報と、の違いに基づいて、前記目標速度を調整するように構成されている、
請求項4に記載の作業機械。
【請求項6】
前記制御装置は、前記作業具の容量に基づいて、前記作業具で掘削を行うための前記目標軌道を設定するように構成されている、
請求項1乃至5のいずれか一つに記載の作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、作業機械では、作業具の目標軌道を設定し、当該目標軌道を沿って作業具が移動するようにアタッチメントの動作を制御する技術が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-154722号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、作業機械では、作業具を目標軌道に沿うようにアタッチメントを動作させる際に、アタッチメントに掛かる負荷が考慮されていないという問題がある。
【0005】
本発明の一態様は、負荷を考慮することで、目標軌道に沿って作業具を移動させる際の追従誤差を抑制して、作業効率を向上させる技術を提供する。
【課題を解決するための手段】
【0006】
本発明の一態様に係る作業機械は、下部走行体と、前記下部走行体に旋回自在の搭載される上部旋回体と、前記上部旋回体に取り付けられるアタッチメントと、前記アタッチメントの先端に設けられる作業具と、前記作業具の目標軌道を設定し、前記作業具が前記目標軌道に従うように前記作業具及び前記アタッチメントの動作を制御するように構成されている制御装置と、前記作業具に係る負荷に関する情報を検出する検出部と、を備え、前記制御装置は、前記目標軌道に従うように前記動作の制御を行う際に、前記負荷に関する情報に基づいて、前記作業具が移動する速度を調整するように構成されている。
【発明の効果】
【0007】
本発明の一態様によれば、目標軌道に沿って作業具を移動させる際の作業効率を向上させる。
【図面の簡単な説明】
【0008】
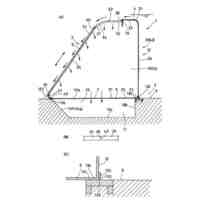
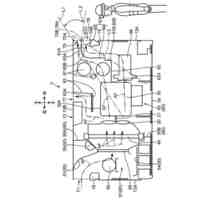
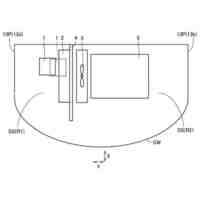
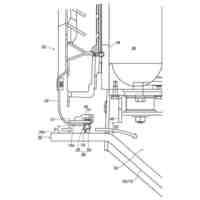
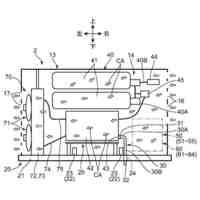
第1の実施形態に係るショベルの側面図である。
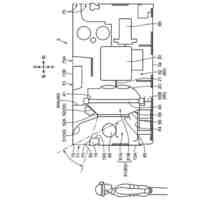
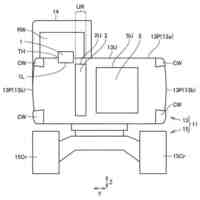
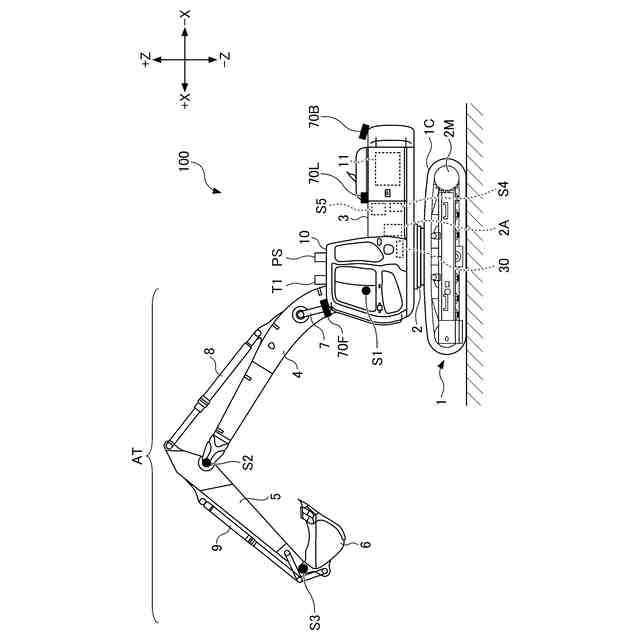
第1の実施形態に係るショベルの上面図である。
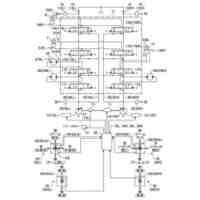
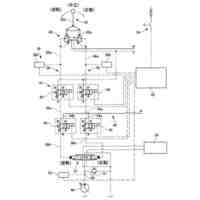
第1の実施形態に係るショベルに搭載される油圧システムの構成例を示す図である。
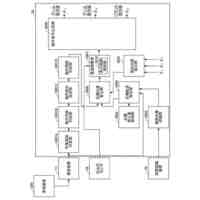
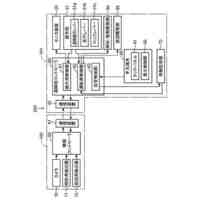
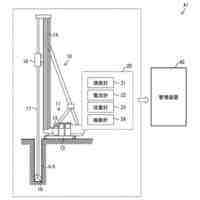
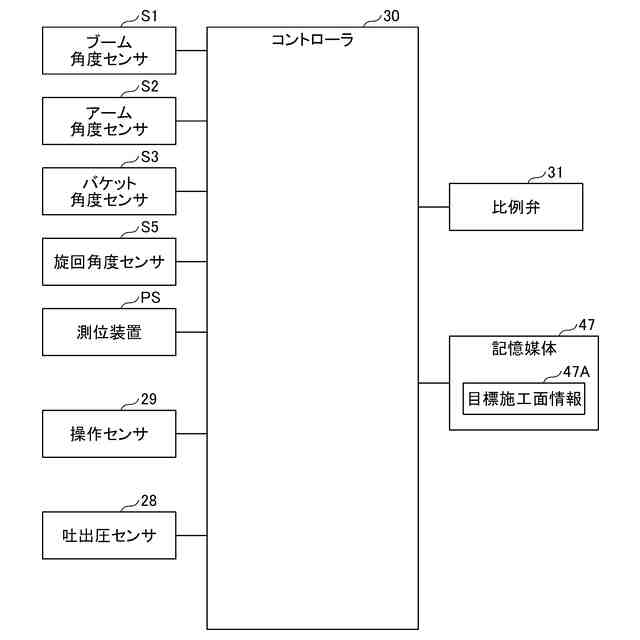
第1の実施形態に係るショベルのコントローラの構成例を示す図である
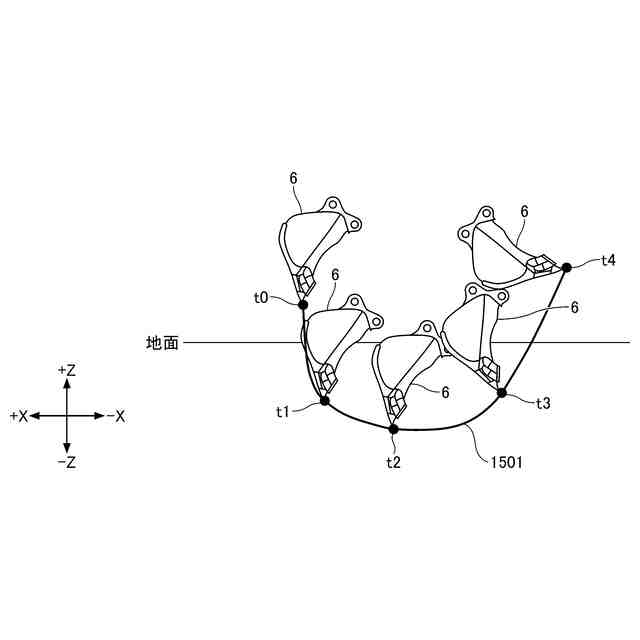
第1の実施形態に係るコントローラにより設定された目標軌道を例示した図である。
従来のショベルによって設定された目標軌道と、従来のショベルが掘削した際の実軌道と、を例示した図である。
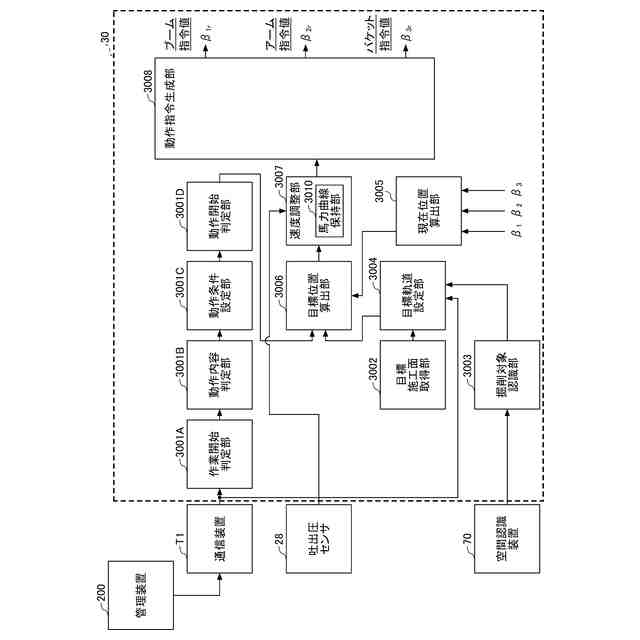
第1の実施形態に係るショベルのマシンコントロール機能に関する機能構成の一例を示す機能ブロック図である。
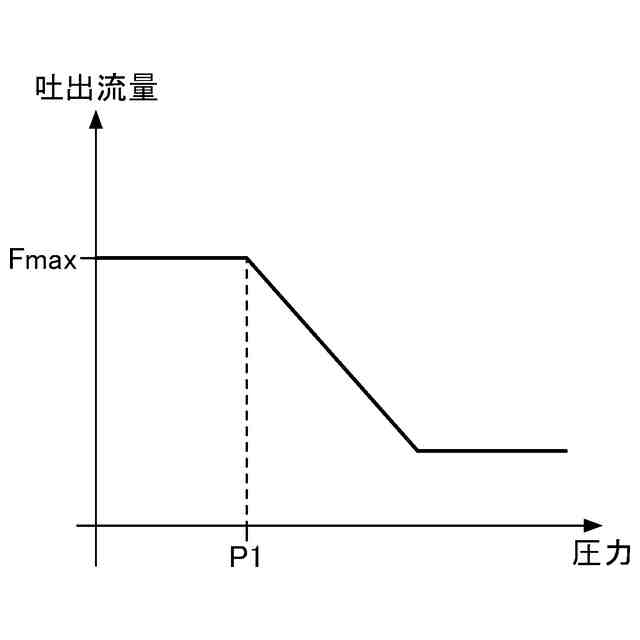
第1の実施形態に係る馬力曲線保持部に保持されている馬力曲線を例示した図である。
第1の実施形態に係る速度調整部による目標移動速度の調整を示した説明図である。
第1の実施形態に係るコントローラによる目標軌道に基づいた自動運転機能の処理手順を示したフローチャートである。
第2の実施形態に係るショベルのマシンコントロール機能に関する機能構成の一例を示す機能ブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照して説明する。また、以下で説明する実施形態は、発明を限定するものではなく例示であって、実施形態に記述される全ての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。なお、各図面において同一の又は対応する構成には同一の又は対応する符号を付し、説明を省略することがある。
【0010】
以下、本発明の実施形態では、作業機械の一例としてショベルを用いる例について説明するが、ショベルに制限するものではない。建設機械、標準機、応用機、林業機械、又は油圧ショベルをベースとした搬送機械に適用してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
透過型堰堤
16日前
鹿島建設株式会社
鉄筋かご
14日前
個人
津波防御三段壁浮上システム。
22日前
中部電力株式会社
沈砂池
14日前
株式会社竹中工務店
壁接合工法
2日前
住友建機株式会社
ショベル
1日前
株式会社エコ・プランナー
取水装置
1日前
カナデビア株式会社
浮体構造体
22日前
コベルコ建機株式会社
作業機械
14日前
コベルコ建機株式会社
作業機械
14日前
コベルコ建機株式会社
作業機械
14日前
株式会社奥村組
建物の基礎構造
8日前
中部美化企業株式会社
水門装置
8日前
コベルコ建機株式会社
操作装置
2日前
株式会社ダイトー
護岸コンクリートの補修構造
1日前
住友重機械工業株式会社
作業機械
1日前
東陽商事株式会社
スイベルの共回り防止装置
16日前
プレス工業株式会社
建設機械のキャビン
14日前
個人
大規模真空沸騰圧密工法と大深度気水分離タンク
1日前
株式会社小松製作所
作業機械
3日前
株式会社竹内製作所
土砂侵入防止構造
8日前
株式会社小松製作所
作業車両
3日前
マックストン株式会社
シート敷設用アンカーブロック
15日前
キヤノン株式会社
移動体および撮像装置
3日前
コベルコ建機株式会社
作業機械
18日前
株式会社立畠組
タイヤ保持具とタイヤ保持具の製作方法
16日前
コベルコ建機株式会社
操作装置及び操作システム
2日前
株式会社竹中工務店
柱脚構造
15日前
コベルコ建機株式会社
建設機械
14日前
株式会社大林組
施工管理システム及び施工管理方法
1日前
株式会社みつば電気
水力発電設備
4日前
株式会社荒谷建設コンサルタント
水力駆動除塵装置
3日前
フリー工業株式会社
擁壁及び擁壁の施工方法
14日前
住友重機械工業株式会社
作業機械の遠隔操作システム
15日前
住友重機械工業株式会社
作業支援システム及び作業機械
14日前
日本車輌製造株式会社
掘削機械の操作装置及び掘削機械
16日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ