TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025074950
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2024173360
出願日
2024-10-02
発明の名称
センサ装置
出願人
株式会社デンソー
,
株式会社SOKEN
代理人
弁理士法人ゆうあい特許事務所
主分類
G01D
5/20 20060101AFI20250507BHJP(測定;試験)
要約
【課題】検出対象の回転角度を検出するとともに、検出対象の変位を検出するセンサ装置を提供する。
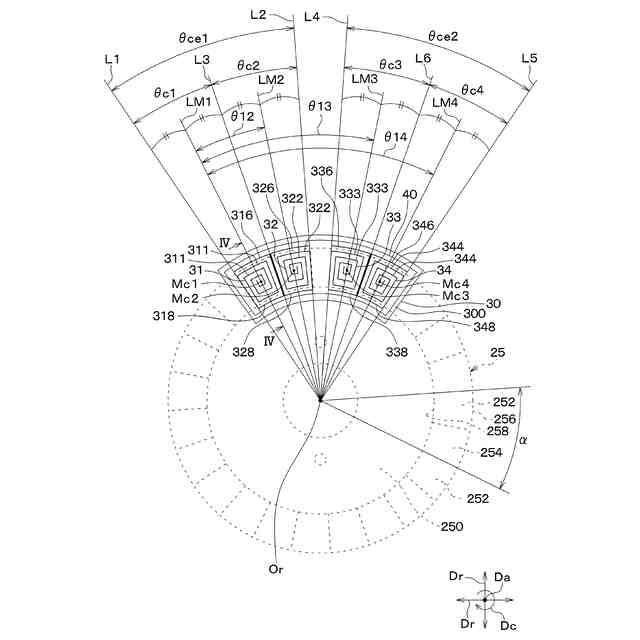
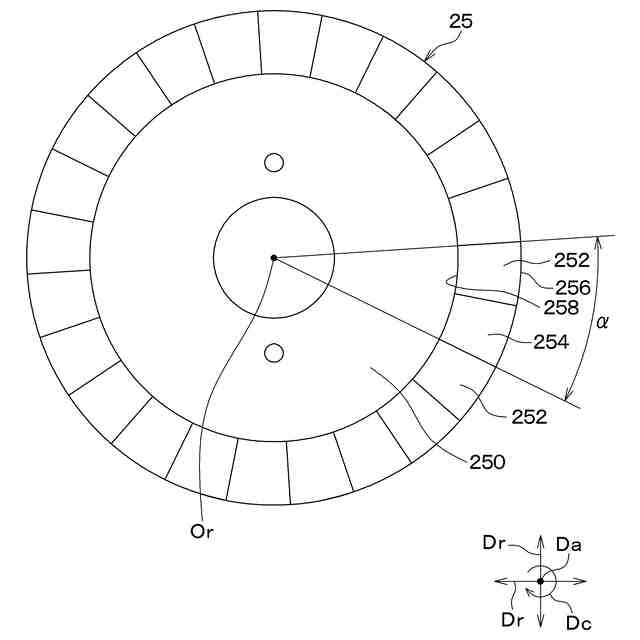
【解決手段】センサ装置は、検出対象の回転により回転軸Orの周りに回転し、検出対象の変位により変位するベース部250と、ベース部250から突出しているとともに周方向Dcに間隔を空けて並んでいる複数の凸部252と、互いに隣り合う凸部252同士の間に形成されている凹部254と、を有するターゲット25と、凸部252によって変化する磁界の変化に応じた周期性を有する電圧を出力する第1コイル31と、第1コイル31と周方向Dcに並んでおり、凸部252によって変化する磁界の変化に応じた周期性を有する電圧であって第1コイル31の電圧とは位相が異なる電圧を出力する第2コイル32と、第1コイル31および第2コイル32の電圧に基づいて、検出対象の回転角度および変位を検出する検出部50と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
検出対象(12)の回転により回転軸(Or)の周りに回転し、前記検出対象の変位により変位するベース部(250)と、前記ベース部から突出しているとともに前記回転軸周りの方向である周方向(Dc)に間隔を空けて並んでいる複数の凸部(252)と、互いに隣り合う前記凸部同士の間に形成されている凹部(254)と、を有する導体(25)と、
前記凸部によって変化する磁界の変化に応じた周期性を有する電圧を出力する第1コイル(31)と、
前記第1コイルと前記周方向に並んでおり、前記凸部によって変化する磁界の変化に応じた周期性を有する電圧であって前記第1コイルの電圧とは位相が異なる電圧を出力する第2コイル(32)と、
前記第1コイルおよび前記第2コイルの電圧に基づいて、前記検出対象の回転角度および変位を検出する検出部(50)と、
を備えるセンサ装置。
続きを表示(約 1,800 文字)
【請求項2】
前記第1コイルおよび前記第2コイルは、前記回転軸が延びている方向(Da)に前記凸部と対向している請求項1に記載のセンサ装置。
【請求項3】
前記第1コイルおよび前記第2コイルは、前記回転軸と直交する方向(Dr)に前記凸部と対向している請求項1に記載のセンサ装置。
【請求項4】
前記凸部の数は、奇数である請求項2または3に記載のセンサ装置。
【請求項5】
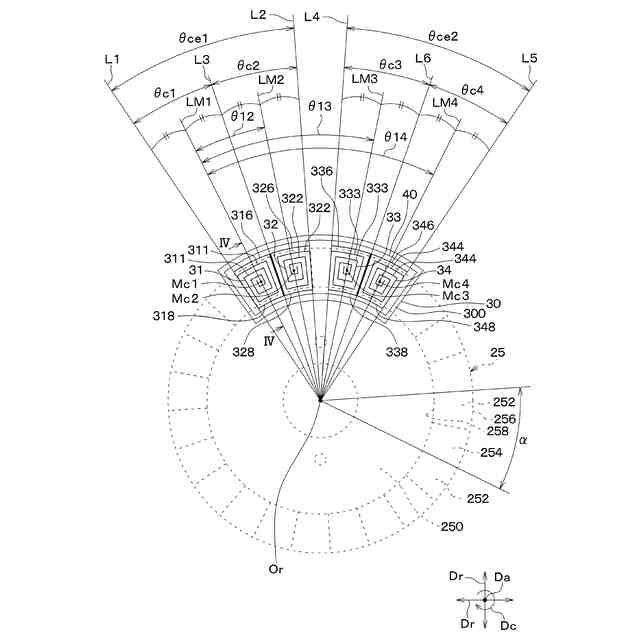
前記回転軸が延びている方向(Da)から見たときにおける、隣り合う前記凸部の互いに対応する部位と前記回転軸とを結んだ直線でなす角度をαとし、
前記回転軸が延びている方向(Da)から見たときにおける、前記第1コイルのうち前記第2コイルとは反対側の端と前記回転軸とを結んだ直線と、前記第2コイルのうち前記第1コイルとは反対側の端と前記回転軸とを結んだ直線とでなす角度をθceとし、
前記回転軸が延びている方向(Da)から見たときにおける、前記第1コイルのうち前記第2コイル側の端と前記回転軸とを結んだ直線と、前記第1コイルのうち前記第2コイルとは反対側の端と前記回転軸とを結んだ直線とでなす角度をθc1とし、
前記回転軸が延びている方向(Da)から見たときにおける、前記第2コイルのうち前記第1コイル側の端と前記回転軸とを結んだ直線と、前記第2コイルのうち前記第1コイルとは反対側の端と前記回転軸とを結んだ直線とでなす角度をθc2とすると、
前記第1コイルおよび前記第2コイルは、
α×1/2≦θc1<θce
α×1/2≦θc2<θce
が成立するように形成されている請求項1ないし3のいずれか1つに記載のセンサ装置。
【請求項6】
前記センサ装置は、前記第1コイルおよび前記第2コイルを囲っている励磁コイル(40)をさらに備え、
前記励磁コイルは、前記励磁コイルに交流電圧が印加されることにより、前記第1コイルを通過する磁界を発生させ、前記第2コイルを通過する磁界を発生させる請求項1ないし3のいずれか1つに記載のセンサ装置。
【請求項7】
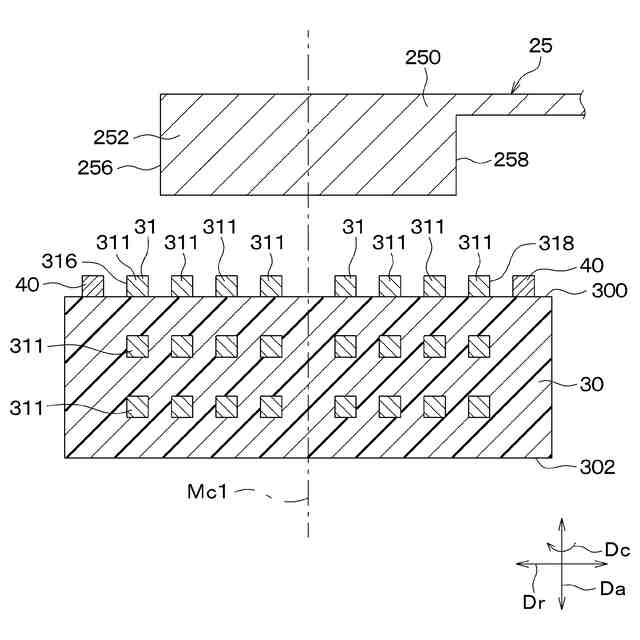
前記周方向における前記第1コイルの中心(Mc1)から前記第1コイルのうち前記第2コイル側の端までの距離と、前記周方向における前記第1コイルの中心(Mc1)から前記第1コイルのうち前記第2コイルとは反対側の端までの距離とは、同じとされており、
前記回転軸と直交する方向における前記第1コイルの中心(Mc1)から前記第1コイルのうち前記回転軸と直交する方向の外側の端までの距離と、前記回転軸と直交する方向における前記第1コイルの中心(Mc1)から前記第1コイルのうち前記回転軸と直交する方向の内側の端までの距離とは、同じとされており、
前記周方向における前記第2コイルの中心(Mc2)から前記第2コイルのうち前記第1コイル側の端までの距離と、前記周方向における前記第2コイルの中心(Mc2)から前記第2コイルのうち前記第1コイルとは反対側の端までの距離とは、同じとされており、
前記回転軸と直交する方向における前記第2コイルの中心(Mc2)から前記第2コイルのうち前記回転軸と直交する方向の外側の端までの距離と、前記回転軸と直交する方向における前記第2コイルの中心(Mc2)から前記第2コイルのうち前記回転軸と直交する方向の内側の端までの距離とは、同じとされている請求項1ないし3のいずれか1つに記載のセンサ装置。
【請求項8】
前記第1コイルおよび前記第2コイルは、渦巻き形状に形成されている請求項1ないし3のいずれか1つに記載のセンサ装置。
【請求項9】
前記第1コイルは、複数の第1線状部(311)を有し、
前記第1線状部は、前記回転軸が延びている方向(Da)に間隔を空けて並んでおり、
前記第2コイルは、複数の第2線状部(322)を有し、
前記第2線状部は、前記回転軸が延びている方向(Da)に間隔を空けて並んでいる請求項1ないし3のいずれか1つに記載のセンサ装置。
【請求項10】
前記凸部は、前記回転軸を中心とする円弧状に形成されている請求項1ないし3のいずれか1つに記載のセンサ装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、センサ装置に関するものである。
続きを表示(約 5,100 文字)
【背景技術】
【0002】
従来、特許文献1に記載されているように、導体パターンおよびセンサ本体により、モータの回転子の回転角度を検出するセンサが知られている。このセンサの導体パターンは、回転子の回転角度に対して、幅が三角関数状に変化する形状を有している。また、センサ本体は、複数のパターンコイルを有している。さらに、パターンコイルのそれぞれに電圧を印加し、導体パターンに渦電流を発生させる。この渦電流によりパターンコイルに発生する電圧の変化によって、回転子の回転角度が検出される。
【先行技術文献】
【特許文献】
【0003】
特開2009-77500号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、モータの回転子等の検出対象の回転角度に加えて、検出対象の軸方向または軸方向と直交する方向等の変位を検出することが求められている。しかし、特許文献1に記載されたセンサでは、検出対象の回転角度が検出されるものの、検出対象の軸方向または軸方向と直交する方向等の変位が検出されない。
【0005】
本開示は、検出対象の回転角度を検出するとともに、検出対象の変位を検出するセンサ装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、検出対象(12)の回転により回転軸(Or)の周りに回転し、検出対象の変位により変位するベース部(250)と、ベース部から突出しているとともに回転軸周りの方向である周方向(Dc)に間隔を空けて並んでいる複数の凸部(252)と、互いに隣り合う凸部同士の間に形成されている凹部(254)と、を有する導体(25)と、凸部によって変化する磁界の変化に応じた周期性を有する電圧を出力する第1コイル(31)と、第1コイルと周方向に並んでおり、凸部によって変化する磁界の変化に応じた周期性を有する電圧であって第1コイルの電圧とは位相が異なる電圧を出力する第2コイル(32)と、第1コイルおよび第2コイルの電圧に基づいて、検出対象の回転角度および変位を検出する検出部(50)と、を備えるセンサ装置である。
【0007】
これにより、検出対象の回転角度が検出されるとともに、検出対象の変位が検出される。
【0008】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
【0009】
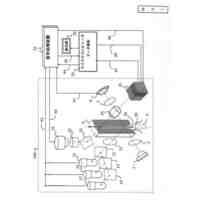
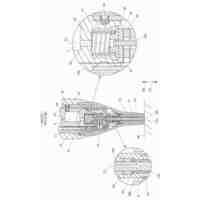
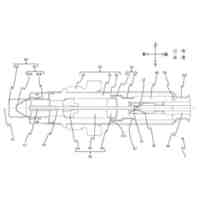
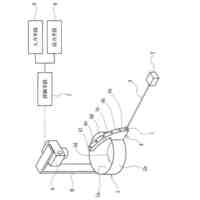
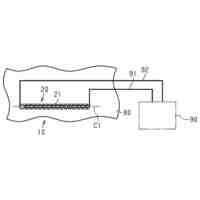
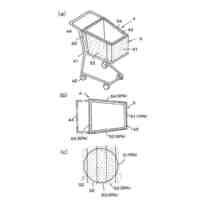
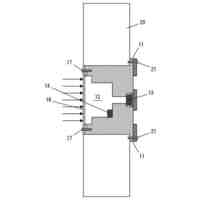
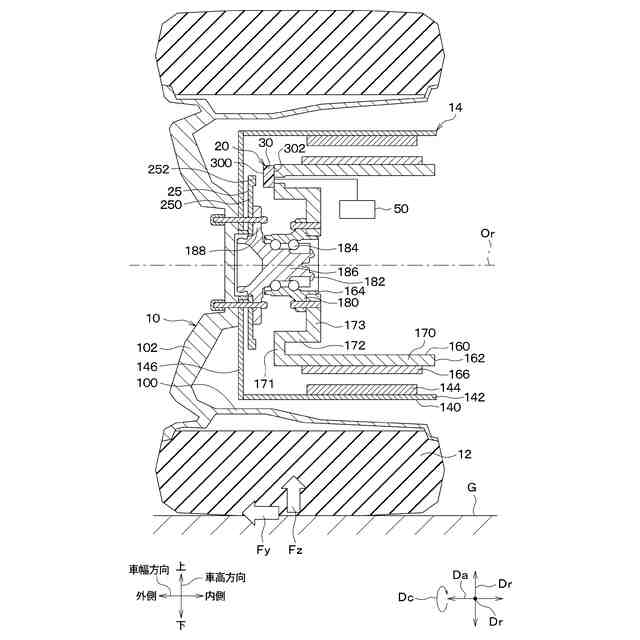
第1実施形態のセンサ装置が用いられるインホイールモータの断面図。
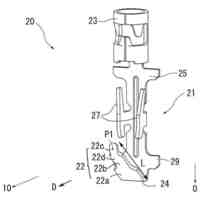
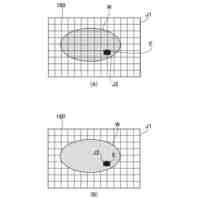
センサ装置のターゲットを示す図。
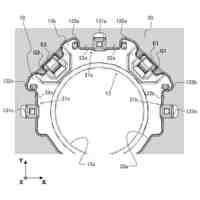
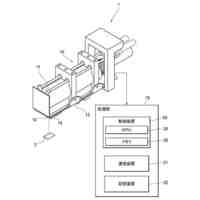
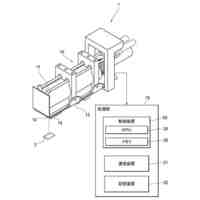
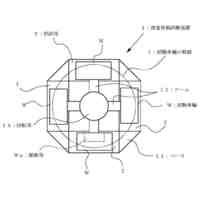
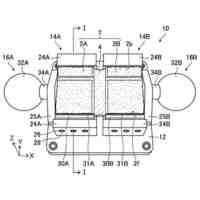
センサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
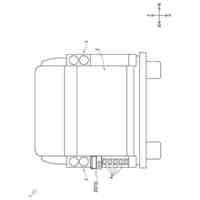
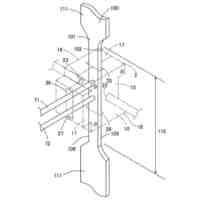
図3のIV-IV線断面図。
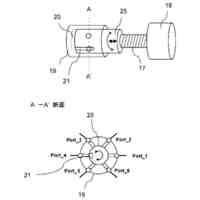
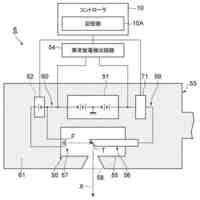
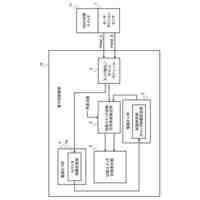
センサ装置の受信コイル、励磁コイル、交流電圧発生回路、検出部を示す図。
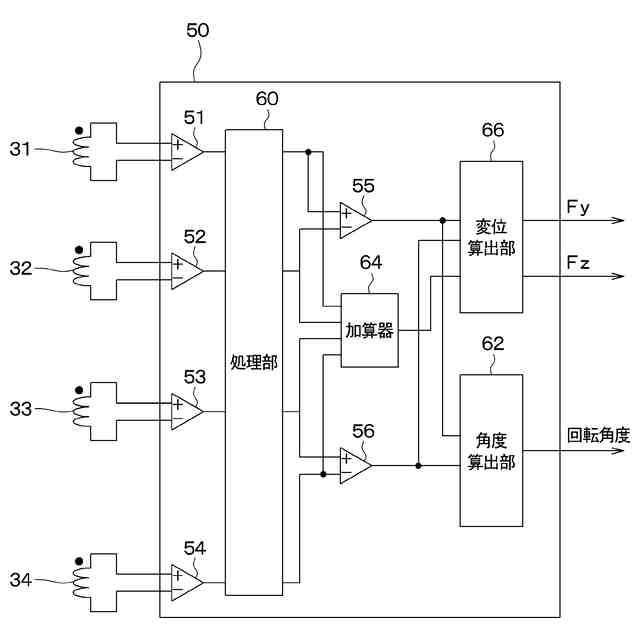
センサ装置の検出部を示す図。
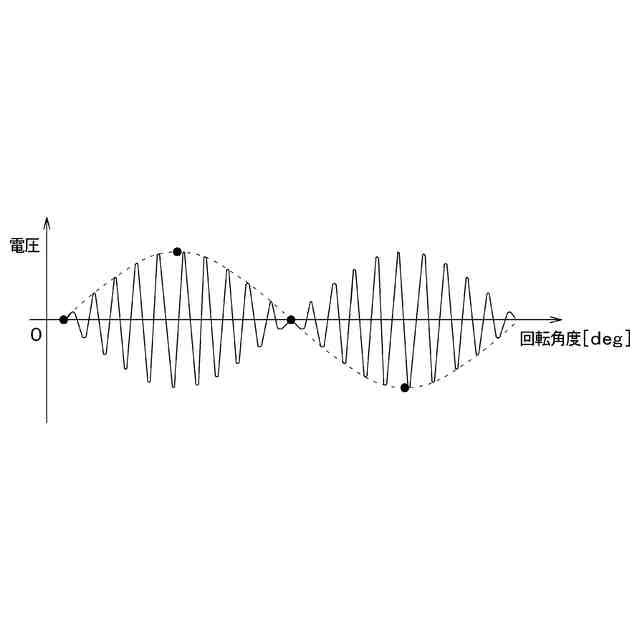
回転角度および受信コイルの電圧の関係図。
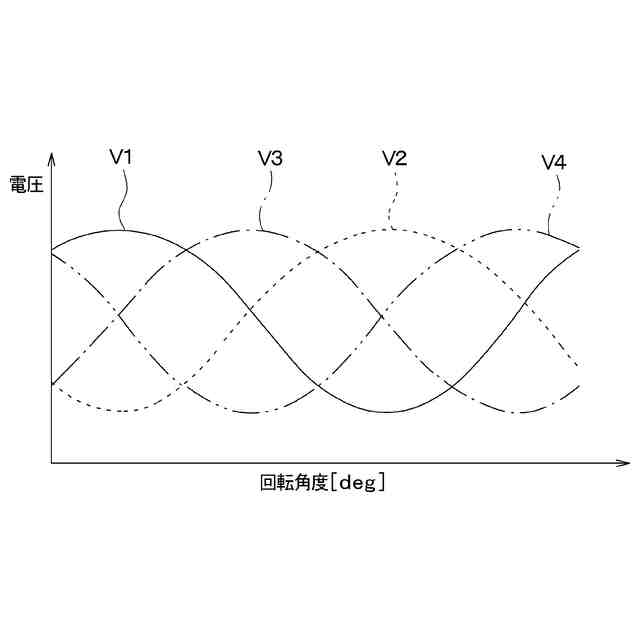
回転角度および包絡線処理がされた受信コイルの電圧の関係図。
回転角度および包絡線処理がされた受信コイルの電圧差の関係図。
軸方向における変位量および包絡線処理がされた受信コイルの電圧差の関係図。
径方向における変位量および包絡線処理がされた受信コイルの電圧和の関係図。
第2実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
センサ装置の受信コイル、励磁コイル、交流電圧発生回路および検出部を示す図。
第3実施形態のセンサ装置のターゲットを示す図。
第4実施形態のセンサ装置のマップを説明するための図。
第5実施形態のセンサ装置の検出部の処理を説明するための回転角度、受信コイルの電圧差および軸方向における変位の関係を示す図。
第6実施形態のセンサ装置の受信コイル、交流電圧発生回路および検出部を示す図。
第7実施形態のセンサ装置の検出部を示す図。
第8実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第9実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第10実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第11実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第12実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第13実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第14実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第15実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第16実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第17実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
図28のXXIX-XXIX線断面図。
ターゲットが径方向に変位するときの様子を示す模式断面図。
径方向における変位量および電圧の変化量の関係を示す図。
第18実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第20実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第21実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第22実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第23実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第24実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第25実施形態のセンサ装置の検出部を示す図。
第1電圧差および第2電圧差の関係を示す図。
補正された第1電圧差および第2電圧差の関係を示す図。
センサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
変位方向、各コイルの電圧、第1電圧差、第2電圧差、補正された第1電圧差および第2電圧差の関係を示す図。
ターゲットが径方向に変位したときにおける補正された第1電圧差および第2電圧差の関係を示す図。
ターゲットが径方向に変位したときにおける補正された第1電圧差および第2電圧差の関係を示す図。
ターゲットが軸方向に変位したときにおける補正された第1電圧差および第2電圧差の関係を示す図。
検出部による径方向および軸方向の変位算出を説明するための図。
検出部による横力の補正を説明するための図。
検出部による垂直荷重の補正を説明するための図。
第26実施形態のセンサ装置の検出部による径方向および軸方向の変位算出を説明するための図。
第27実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
図50のLI部拡大図。
第28実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第29実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第30実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
図54のLV部拡大図。
第31実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第32実施形態のセンサ装置のマップを説明するための図。
第33実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第34実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第35実施形態のセンサ装置のターゲットを示す図。
第36実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
センサ装置の第1受信コイルを示す図。
センサ装置の第2受信コイルを示す図。
図61のLXIV部拡大図。
第37実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第38実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
図66のLXVII部拡大図。
径方向におけるターゲットの変位と、第3受信コイルおよび第4受信コイルの電圧との関係を示す図。
軸方向におけるターゲットの変位と、第3受信コイルおよび第4受信コイルの電圧との関係を示す図。
第39実施形態のセンサ装置のターゲットおよび受信コイルを示す図。
第40実施形態のセンサ装置のターゲットおよび受信コイルを示す図。
第41実施形態のセンサ装置のターゲットおよび受信コイルを示す図。
第42実施形態のセンサ装置のターゲットおよび受信コイルを示す図。
第43実施形態のセンサ装置のターゲットおよび受信コイルを示す図。
第44実施形態のセンサ装置のターゲットを示す図。
センサ装置のターゲットおよび受信コイルを示す図。
第45実施形態のセンサ装置のターゲットおよび受信コイルを示す図。
第46実施形態のセンサ装置のターゲットおよび受信コイルを示す図。
時間と、第3受信コイルおよび第4受信コイルの電圧との関係を示す図。
時間と、第3受信コイルおよび第4受信コイルの電圧との関係を示す図。
第47実施形態のセンサ装置のターゲットおよび受信コイルを示す図。
第48実施形態のセンサ装置のターゲットおよび受信コイルの断面図。
センサ装置の受信コイルおよび検出部を示す図。
第49実施形態のセンサ装置のターゲットおよび受信コイルを示す図。
第50実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
図85のLXXXVI部拡大図。
第51実施形態のセンサ装置のターゲットおよび受信コイルを示す図。
第52実施形態のセンサ装置のターゲットおよび受信コイルを示す図。
第53実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
周方向の位置と、励磁コイルによる磁界の強さとの関係を示す図。
回転角度と、回転角度の真値からのズレ量との関係を示す図。
周方向の位置と、励磁コイルによる磁界の強さと、受信コイルの位置との関係を示す図。
回転角度と、回転角度の真値からのズレ量との関係を示す図。
第54実施形態のセンサ装置のターゲット、受信コイル、励磁コイルおよび基板を示す図。
第55、第56実施形態のセンサ装置のターゲットおよび第1受信コイルを示す図。
径方向におけるコイル外端から凸部外端までの距離と、ターゲットが軸方向に移動したときの受信コイルの電圧との関係を示す図。
径方向におけるコイル外端から凸部外端までの距離と、ターゲットが軸方向に移動したときの受信コイルの電圧と、ターゲットが径方向に移動したときの受信コイルの電圧との関係を示す図。
第57実施形態のセンサ装置のターゲットおよび第1受信コイルを示す図。
径方向におけるコイル外端から凸部外端までの距離と、ターゲットが径方向に移動したときの受信コイルの電圧との関係を示す図。
第58、第59実施形態のセンサ装置のターゲットおよび第1受信コイルを示す図。
【発明を実施するための形態】
【0010】
以下、実施形態について図面を参照しつつ説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、同一符号を付し、その説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
21日前
株式会社イシダ
計量装置
15日前
日本精機株式会社
表示装置
1日前
日本精機株式会社
アセンブリ
7日前
株式会社エビス
水準器
今日
個人
アクセサリー型テスター
22日前
個人
準結晶の解析方法
7日前
株式会社豊田自動織機
自動走行体
6日前
株式会社テイエルブイ
振動検出装置
21日前
日本碍子株式会社
ガスセンサ
今日
ダイハツ工業株式会社
試料セル
21日前
トヨタ自動車株式会社
検査装置
15日前
GEE株式会社
光学特性測定装置
6日前
日本特殊陶業株式会社
ガスセンサ
7日前
株式会社不二越
X線測定装置
1日前
東ソー株式会社
簡易型液体クロマトグラフ
17日前
株式会社TISM
センサ部材
6日前
株式会社不二越
X線測定装置
1日前
TDK株式会社
計測装置
1日前
大和製衡株式会社
表示システム
13日前
株式会社ニコン
検出装置
21日前
リバークル株式会社
荷重移動試験装置
15日前
株式会社小糸製作所
物体検知システム
7日前
大和ハウス工業株式会社
引張装置
14日前
エスペック株式会社
温度槽及び試験方法
2日前
アンリツ株式会社
機器及びフィルタ
7日前
株式会社イシダ
X線検査装置
15日前
株式会社 システムスクエア
X線検査装置
17日前
トヨタ自動車株式会社
情報処理装置
21日前
Astemo株式会社
電子制御装置
3日前
トヨタ自動車株式会社
情報処理装置
21日前
株式会社豊田自動織機
電流検出装置
21日前
トヨタ自動車株式会社
情報処理装置
21日前
株式会社イシダ
搬送装置
13日前
合同会社ステディステップス
側圧測定装置
21日前
トヨタ自動車株式会社
音源推定方法
13日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ