TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025077223
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023189251
出願日
2023-11-06
発明の名称
自動走行システム及び自動走行車両
出願人
ジヤトコ株式会社
代理人
弁理士法人後藤特許事務所
主分類
G05D
1/43 20240101AFI20250512BHJP(制御;調整)
要約
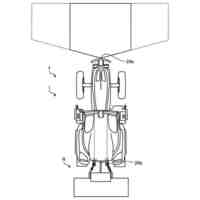
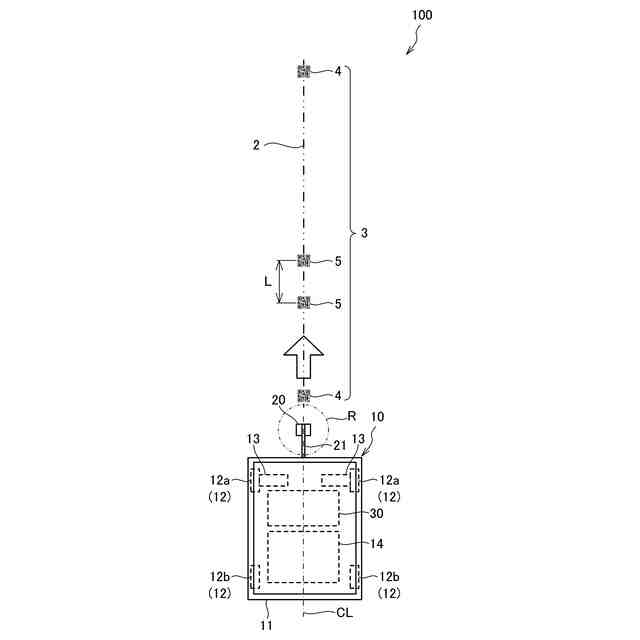
【課題】誘導ラインを用いずに自動走行する場合に、自動走行車両の設定軌道からのずれを抑制する。
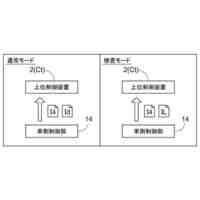
【解決手段】自動走行システムは、自動走行車両の経路に設置されている複数の二次元コードと、前記二次元コードを読み取り可能な読取装置と、前記二次元コードの情報に基づいて前記自動走行車両の動作を制御するコントローラと、を備え、前記二次元コードは、前記自動走行車両の移動用の情報が符号化された移動用二次元コードと、前記自動走行車両の軌道を修正するための軌道修正指示の情報が符号化された軌道修正用二次元コードと、を有し、前記自動走行車両は、前記読取装置が前記軌道修正用二次元コードを読み取ると軌道修正モードになり、前記コントローラは、前記軌道修正モードにおいて、前記移動用二次元コードにより設定される設定軌道からのずれ量を、複数の前記軌道修正用二次元コードの位置関係に基づいて判断し、前記自動走行車両の軌道を修正する。
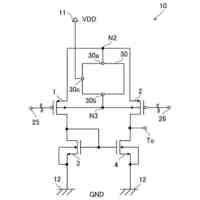
【選択図】図1
特許請求の範囲
【請求項1】
自動走行車両を走行させる自動走行システムであって、
前記自動走行車両が走行する経路に予め設置されている複数の二次元コードと、
前記自動走行車両に設けられ、前記二次元コードを読み取り可能な読取装置と、
前記二次元コードの情報に基づいて前記自動走行車両の動作を制御するコントローラと、
を備え、
前記二次元コードは、
前記自動走行車両の移動用の情報が符号化された移動用二次元コードと、
前記自動走行車両の軌道を修正するための軌道修正指示の情報が符号化された軌道修正用二次元コードと、を有し、
前記自動走行車両は、前記読取装置が前記軌道修正用二次元コードを読み取ると軌道修正モードになり、
前記コントローラは、前記軌道修正モードにおいて、前記移動用二次元コードにより設定される設定軌道からのずれ量を、複数の前記軌道修正用二次元コードの位置関係に基づいて判断し、前記自動走行車両の軌道を修正する、
自動走行システム。
続きを表示(約 620 文字)
【請求項2】
請求項1に記載の自動走行システムであって、
前記軌道修正用二次元コードは、所定の距離をあけて設けられる2つによって構成される、
自動走行システム。
【請求項3】
請求項1又は2に記載の自動走行システムであって、
前記自動走行車両は、前記軌道修正モードにて前記自動走行車両の軌道修正が完了すると、前記軌道修正モードを終了して移動モードになる、
自動走行システム。
【請求項4】
自動走行車両であって、
走行する経路に予め設置されている複数の二次元コードを読み取り可能な読取装置と、
前記二次元コードの情報に基づいて前記自動走行車両の動作を制御するコントローラと、
を備え、
前記二次元コードは、
前記自動走行車両の移動用の情報が符号化された移動用二次元コードと、
前記自動走行車両の軌道を修正するための軌道修正指示の情報が符号化された軌道修正用二次元コードと、を有し、
前記自動走行車両は、前記読取装置が前記軌道修正用二次元コードを読み取ると軌道修正モードになり、
前記コントローラは、前記軌道修正モードにおいて、前記移動用二次元コードにより設定される設定軌道からのずれ量を、複数の前記軌道修正用二次元コードの位置関係に基づいて判断し、前記自動走行車両の軌道を修正する、
自動走行車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動走行システム及び自動走行車両に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、床面に設置された二次元コードを読み取るコード読取部と、床面に設置された誘導ラインを光学的に検知する誘導路検知部と、を備え、予め定められた経路を無人で走行する自動走行車両が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-156280号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の自動走行車両では、二次元コードと誘導ラインとを読み取りながら走行するので、各々の情報を読み取るために2つのプログラムが必用である。
【0005】
そこで、本願発明者は、誘導ラインを用いずに二次元コードのみを用いて自動走行車両を走行させることを検討した。そして、本願発明者は、誘導ラインを用いずに自動走行を行うと、微小な位置や方向のずれが蓄積されて、自動走行車両が設定軌道から外れるおそれがある点を見出した。
【0006】
本発明は、誘導ラインを用いずに自動走行する場合に、自動走行車両の設定軌道からのずれを抑制することを目的とする。
【課題を解決するための手段】
【0007】
本発明のある態様では、自動走行車両を走行させる自動走行システムは、前記自動走行車両が走行する経路に予め設置されている複数の二次元コードと、前記自動走行車両に設けられ、前記二次元コードを読み取り可能な読取装置と、前記二次元コードの情報に基づいて前記自動走行車両の動作を制御するコントローラと、を備え、前記二次元コードは、前記自動走行車両の移動用の情報が符号化された移動用二次元コードと、前記自動走行車両の軌道を修正するための軌道修正指示の情報が符号化された軌道修正用二次元コードと、を有し、前記自動走行車両は、前記読取装置が前記軌道修正用二次元コードを読み取ると軌道修正モードになり、前記コントローラは、前記軌道修正モードにおいて、前記移動用二次元コードにより設定される設定軌道からのずれ量を、複数の前記軌道修正用二次元コードの位置関係に基づいて判断し、前記自動走行車両の軌道を修正する。
【発明の効果】
【0008】
本発明のある態様によれば、移動用二次元コードにより設定される設定軌道からのずれ量を複数の軌道修正用二次元コードの位置関係に基づいて判断し、自動走行車両の軌道を修正するので、設定軌道からのずれを修正することができる。したがって、誘導ラインを用いずに自動走行する場合に、自動走行車両の設定軌道からのずれを抑制することができる。
【図面の簡単な説明】
【0009】
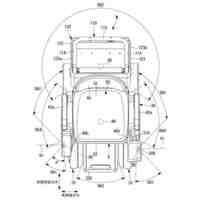
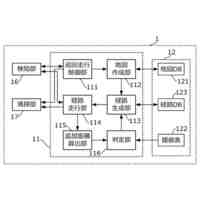
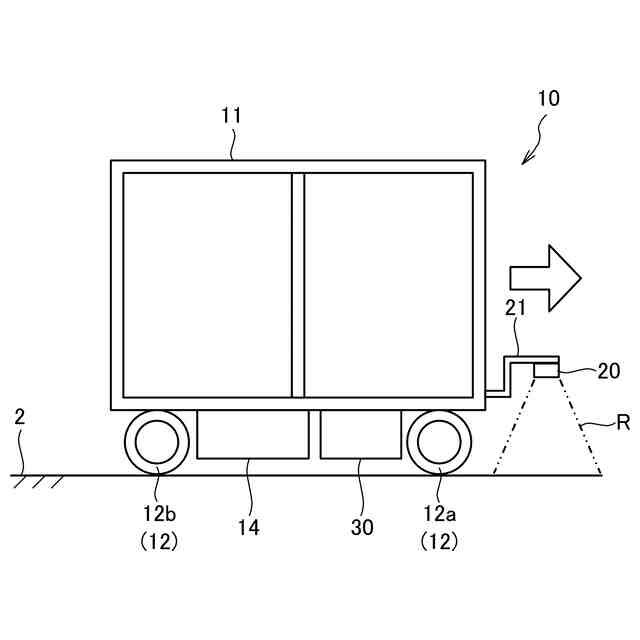
図1は、本発明の実施形態に係る自動走行システムの概要を説明する構成図である。
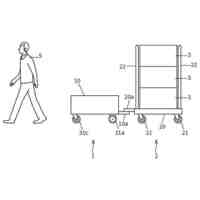
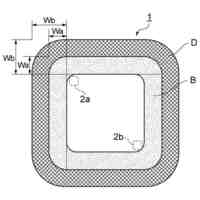
図2は、自動走行システムにおける自動走行車両の側面図である。
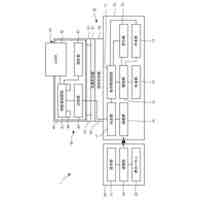
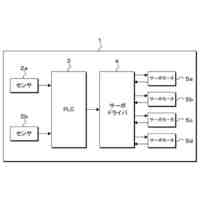
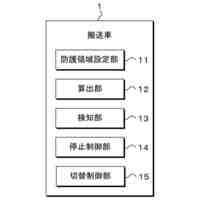
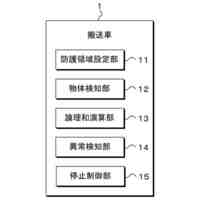
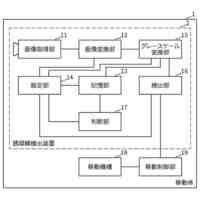
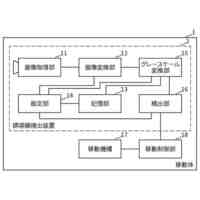
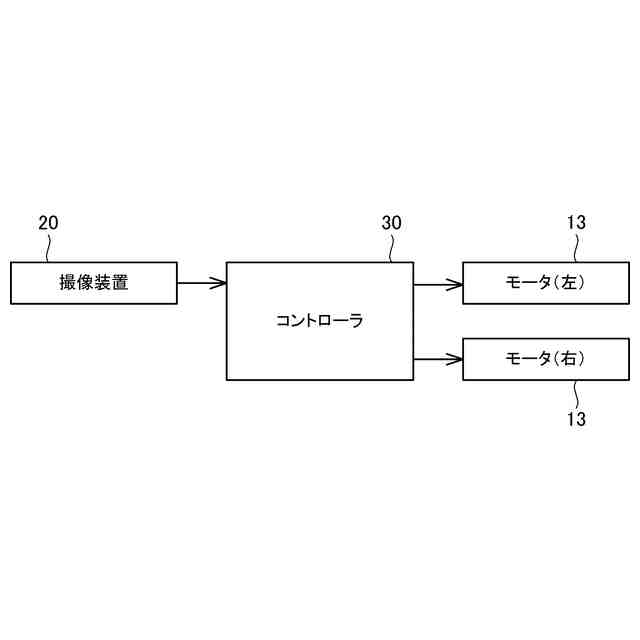
図3は、自動走行車両の制御ブロック図である。
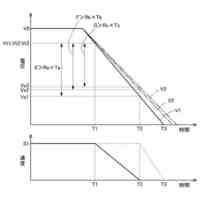
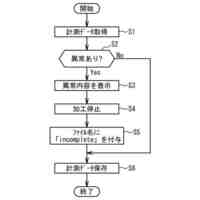
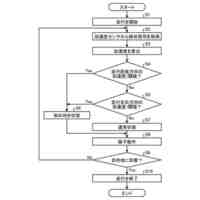
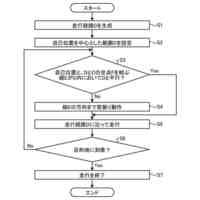
図4は、自動走行システムにおける軌道修正動作を説明するフローチャートである。
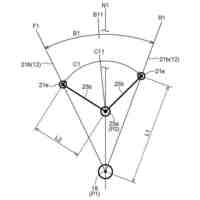
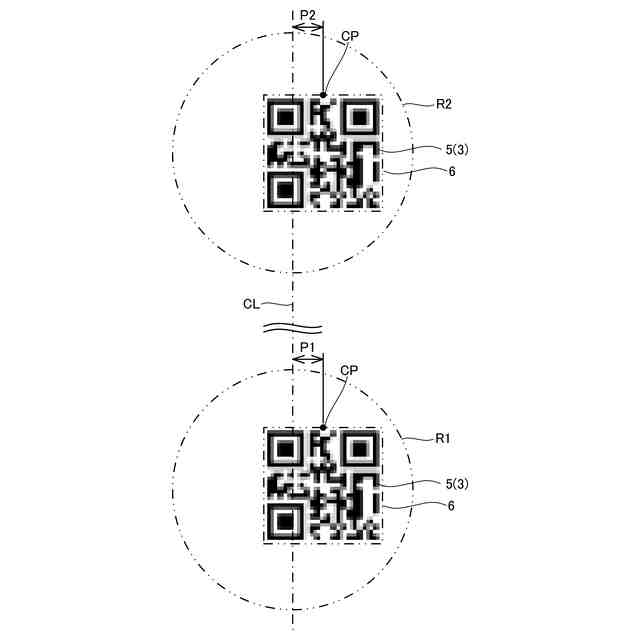
図5は、自動走行システムにおける軌道修正動作の具体例を説明する図であり、自動走行車両が設定軌道から左に平行にずれた状態を説明する図である。
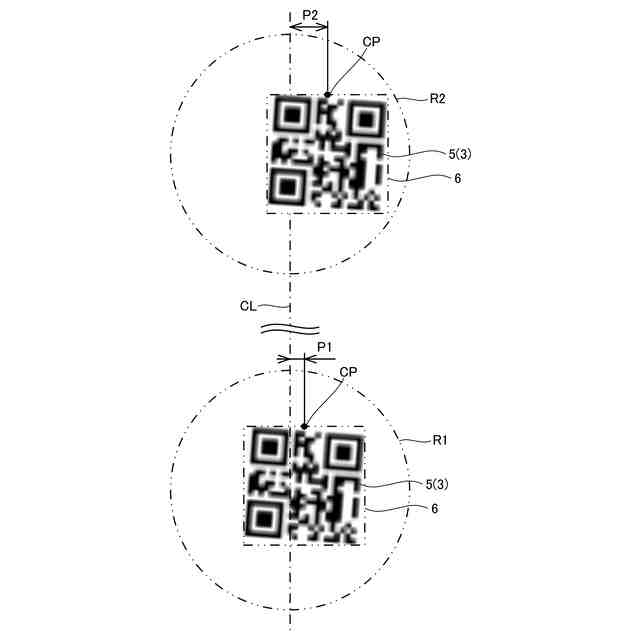
図6は、自動走行システムにおける軌道修正動作の具体例を説明する図であり、自動走行車両の角度が設定軌道から時計回りにずれた状態を説明する図である。
図7は、自動走行システムにおける軌道修正動作の具体例を説明する図であり、自動走行車両の角度が設定軌道から反時計回りにずれた状態を説明する図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本発明の実施形態に係る自動走行システム1について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ジヤトコ株式会社
把持機構
18日前
ジヤトコ株式会社
アクチュエータ
20日前
ジヤトコ株式会社
自動走行システム及び自動走行車両
20日前
ジヤトコ株式会社
溶接位置決め装置及び溶接位置決め方法
24日前
日産自動車株式会社
ギヤ式動力伝達装置
1か月前
エイブリック株式会社
基準電圧回路
1か月前
株式会社クボタ
作業車
2か月前
株式会社ダイフク
搬送車
2か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
ペダル機構
16日前
株式会社ダイフク
搬送設備
17日前
三栄ハイテックス株式会社
基準電圧回路
2日前
トヨタ自動車株式会社
工作機械の制御装置
2か月前
トヨタ自動車株式会社
工作機械の制御装置
2か月前
三菱電機株式会社
自己位置推定装置
26日前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
移動体、及び制御方法
24日前
株式会社やまびこ
走行制御装置
1か月前
株式会社タブチ
減圧弁
1か月前
株式会社計数技研
移動体、及びプログラム
17日前
WHILL株式会社
電動モビリティ
25日前
株式会社ダイヘン
搬送車
1か月前
ローム株式会社
半導体装置
5日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
24日前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社デンソー
診断装置
1か月前
井関農機株式会社
作業車両
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
9日前
株式会社ダイヘン
移動体、及び誘導線検出装置
9日前
FCLコンポーネント株式会社
電源回路および検出装置
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ