TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025077974
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2024110549
出願日
2024-07-09
発明の名称
水力駆動型地滑り観測警報方法
出願人
石家庄鉄道大学
代理人
弁理士法人白坂
主分類
G01D
21/00 20060101AFI20250512BHJP(測定;試験)
要約
【課題】地滑り地質災害予防制御の技術分野に適しており、地滑り観測警報方法、電子機器及び記憶媒体を提供する。
【解決手段】地滑り体の複数の観測点の変位観測データを取得し、変位観測データを傾向項と周期項に分解することと、複数の観測点の傾向項に応じて、反転して異なる時刻点の最良力学パラメータを得て、異なる時刻点の最良力学パラメータに応じて、地滑り体の安全係数時間系列を得ることと、傾向項と周期項をそれぞれ融合し、融合傾向項系列と融合周期項系列を得、2つの系列を重畳し、総合変形時間系列を得、総合変形時間系列に応じて総合変形速力総合変形速力時間系列を確定することと、安全係数時間系列と総合変形速力時間系列との対応関係を作成し、対応関係に応じて、少なくとも1つの総合変形速力臨界値を確定し、少なくとも1つの総合変形速力臨界値に基づいて、地滑り体に対して観測警報を行うことと、を含む。
【選択図】図1
特許請求の範囲
【請求項1】
地滑り体の複数の観測点の変位観測データを取得し、前記変位観測データを傾向項と周期項に分解することと、
前記複数の観測点の傾向項に応じて、反転して異なる時刻点の最良力学パラメータを得て、異なる時刻点の最良力学パラメータに応じて、前記地滑り体の異なる時刻点での安定性を評価し、前記地滑り体の安全係数時間系列を得ることと、
前記複数の観測点の傾向項と周期項をそれぞれ融合し、融合傾向項系列と融合周期項系列を得、前記融合傾向項系列と前記融合周期項系列を重畳し、総合変形時間系列を得、前記総合変形時間系列に応じて総合変形速力時間系列を確定することと、
前記安全係数時間系列と前記総合変形速力時間系列との対応関係を作成し、前記対応関係に応じて、少なくとも1つの総合変形速力臨界値を確定し、前記少なくとも1つの総合変形速力臨界値に基づいて、前記地滑り体に対して観測警報を行うことと、を含む、
ことを特徴とする地滑り観測警報方法。
続きを表示(約 3,000 文字)
【請求項2】
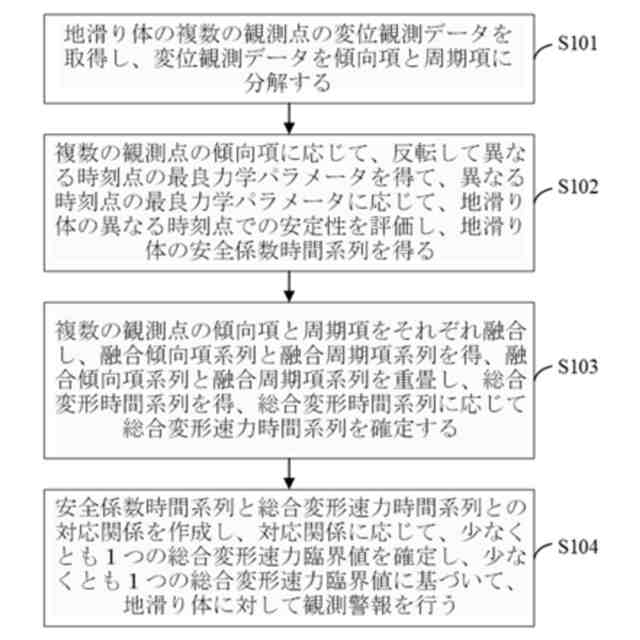
前記した、前記複数の観測点の傾向項に応じて、反転して異なる時刻点の最良力学パラメータを得ることは、
前記複数の観測点の傾向項に応じて、前記複数の観測点の傾向項と力学パラメータとの加重目的関数
JPEG
2025077974000053.jpg
13
42
を作成し、そのうち、T(x)は、目的関数値であり、
JPEG
2025077974000054.jpg
6
11
は、i番目の観測点の傾向項と力学パラメータとの間の数学的関係であり、T
Di
は、i番目の観測点の傾向項であり、xは、力学パラメータの組合せベクトルであり、w
i
は、i番目の観測点の傾向項重み値であることと、
異なる時刻点の、前記目的関数値を最も小さくさせる力学パラメータを計算し、異なる時刻点の最良力学パラメータを得ることと、を含む、
ことを特徴とする請求項1に記載の地滑り観測警報方法。
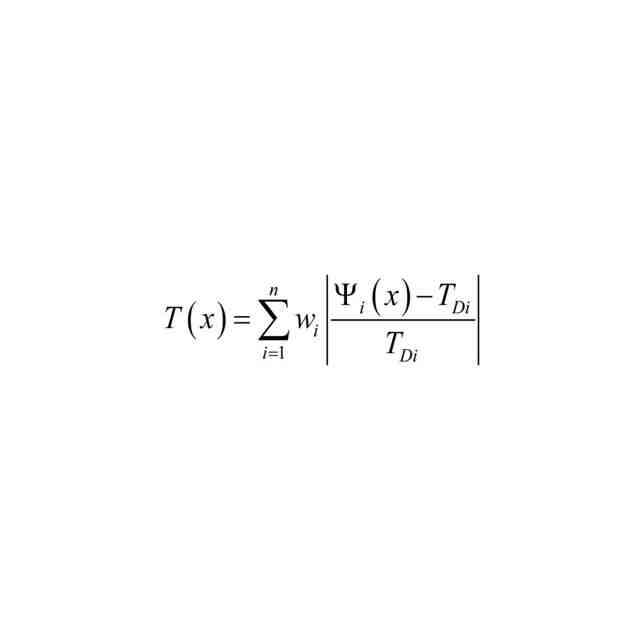
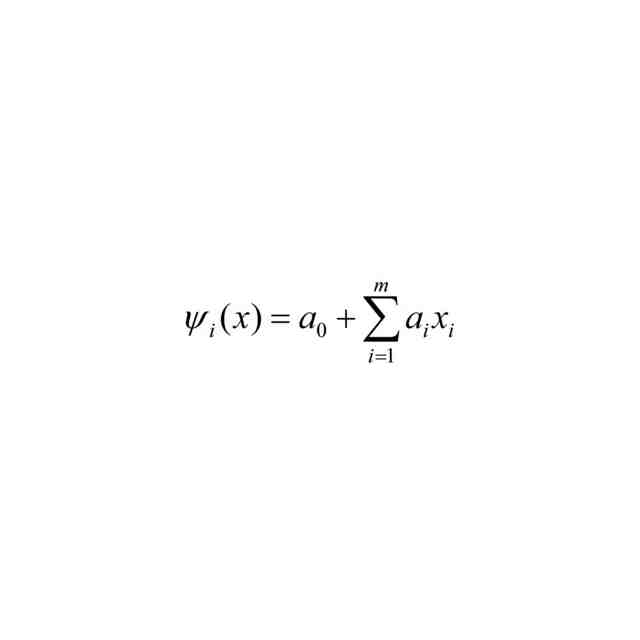
【請求項3】
前記傾向項と力学パラメータとの間の数学的関係は、
JPEG
2025077974000055.jpg
13
37
であり、
そのうち、
JPEG
2025077974000056.jpg
8
5
は、i番目の反転待ちの力学パラメータに対応するフィッティング係数であり、mは、反転待ちの力学パラメータの数であり、
JPEG
2025077974000057.jpg
8
5
は、プリセット値であり、
JPEG
2025077974000058.jpg
8
5
は、i番目の反転待ちの力学パラメータである、
ことを特徴とする請求項2に記載の地滑り観測警報方法。
【請求項4】
前記した、異なる時刻点の最良力学パラメータに応じて、前記地滑り体の異なる時刻点での安定性を評価し、前記地滑り体の安全係数時間系列を得ることは、
前記異なる時刻点の最良力学パラメータを、プリセットされた地滑り体数値分析モデルに入力し、数値模擬前向計算法により前記地滑り体の異なる時刻点での安定性を評価し、前記地滑り体の安全係数時間系列を得る、ことを含む、
ことを特徴とする請求項1に記載の地滑り観測警報方法。
【請求項5】
前記した、前記複数の観測点の傾向項と周期項をそれぞれ融合し、融合傾向項系列と融合周期項系列を得ることは、
事前に計算された個々の観測点の傾向項重み値に応じて、前記複数の観測点の傾向項に対して加重結合を行い、前記融合傾向項系列を得ることと、
事前に計算された個々の観測点の周期項重み値に応じて、前記複数の観測点の周期項に対して加重結合を行い、前記融合周期項系列を得ることと、を含む、
ことを特徴とする請求項1~4のいずれか一項に記載の地滑り観測警報方法。
【請求項6】
前記個々の観測点の傾向項重み値は、
JPEG
2025077974000059.jpg
17
26
に応じて計算され、
そのうち、w
i
は、i番目の観測点の傾向項重み値であり、nは、観測点の数であり、H
i
は、i番目の観測点のエントロピーであり、
JPEG
2025077974000060.jpg
13
38
であり、lは、個々の観測点の傾向項数であり、
JPEG
2025077974000061.jpg
18
29
であり、T
Di
は、i番目の観測点の傾向項である、
ことを特徴とする請求項5に記載の地滑り観測警報方法。
【請求項7】
前記個々の観測点の周期項重み値は、
個々の観測点の貯水池水位データ及び降雨量データを取得し、
前記貯水池水位データ及び降雨量データに応じて、個々の観測点のプリセット時間帯内での最大貯水池水位差、最大貯水池水位変化率、移動平均降雨量、有効降雨量を計算し、
個々の観測点の周期項及び各指標に対して平均値化処理を行った後、周期項と各指標との相関度をそれぞれ計算し、前記各指標には、前記最大貯水池水位差、前記最大貯水池水位変化率、前記移動平均降雨量及び前記有効降雨量が含まれ、
前記相関度に応じて、個々の観測点に対応する相関度モジュラス長を計算し、
JPEG
2025077974000062.jpg
17
21
に応じて個々の観測点の周期項重み値を計算し、そのうち、
JPEG
2025077974000063.jpg
6
4
は、i番目の観測点の周期項重み値であり、nは、観測点の数であり、Rl
i
は、i番目の観測点に対応する相関度モジュラス長である、方式により計算される、
ことを特徴とする請求項5に記載の地滑り観測警報方法。
【請求項8】
前記した、前記安全係数時間系列と前記総合変形速力時間系列との対応関係を作成し、前記対応関係に応じて、少なくとも1つの総合変形速力臨界値を確定することは、
安全係数と総合変形速力との灰色相関係数を計算することと、
灰色相関係数と安全係数をランダムフォレストモデルの入力とし、総合変形速力をランダムフォレストモデルの出力とし、総合変形速力予測モデルを訓練して得ることと、
少なくとも1つの安全係数臨界値と灰色相関係数プリセット値を前記総合変形速力予測モデルに入力し、前記少なくとも1つの総合変形速力臨界値を得ることと、を含み、
前記した、前記少なくとも1つの総合変形速力臨界値に基づいて、前記地滑り体に対して観測警報を行うことは、
前記地滑り体のリアルタイム総合変形速力を観測することと、
前記リアルタイム総合変形速力と前記少なくとも1つの総合変形速力臨界値の大小関係に応じて、地滑り危険度を確定することと、
前記地滑り危険度に基づいて、前記地滑り体に対して観測警報を行うことと、を含む、
ことを特徴とする請求項1~4のいずれか一項に記載の地滑り観測警報方法。
【請求項9】
メモリ、プロセッサ及び前記メモリに記憶されて前記プロセッサで動作可能なコンピュータプログラムを備える電子機器であって、前記プロセッサが前記コンピュータプログラムを執行すると請求項1~8のいずれか一項に記載の方法のステップが実現される、
ことを特徴とする電子機器。
【請求項10】
コンピュータプログラムが記憶されたコンピュータ可読記憶媒体であって、前記コンピュータプログラムがプロセッサに執行されると請求項1~8のいずれか一項に記載の方法のステップが実現される、
ことを特徴とするコンピュータ可読記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、地滑り地質災害予防制御の技術分野に属し、特に地滑り観測警報方法、電子機器及び記憶媒体に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
現在、地滑り観測は、既に従来の点式の人為的観測から「天(光学的リモートセンシング及びレーダー)-空(無人航空機写真測量)-地(全地球測位衛星システム、トータルステーション等の専門観測)」の多次元協働観測へと徐々に発展している。また、観測内容も単一の変形観測から応力、傾斜、地下水、雨量、微動、音波、映像等の様々な異次元データの観測へと発展している。しかしながら、現在の地滑り観測方法と警報モデルは実質上、1つの単純なデータ処理方式であり、いずれも地滑り体自体の地質条件及び斜面体構造形式を考慮していないため、観測警報モデルの地質及び力学基礎が不足しており、正確度が高くない。
【発明の概要】
【発明が解決しようとする課題】
【0003】
これに鑑みて、本発明の実施例では、地滑り観測警報の正確度を向上させるための地滑り観測警報方法、電子機器及び記憶媒体を提供する。
【課題を解決するための手段】
【0004】
本発明の実施例の第1態様では、
地滑り体の複数の観測点の変位観測データを取得し、変位観測データを傾向項と周期項に分解することと、
複数の観測点の傾向項に応じて、反転して異なる時刻点の最良力学パラメータを得て、異なる時刻点の最良力学パラメータに応じて、地滑り体の異なる時刻点での安定性を評価し、地滑り体の安全係数時間系列を得ることと、
複数の観測点の傾向項と周期項をそれぞれ融合し、融合傾向項系列と融合周期項系列を得、融合傾向項系列と融合周期項系列を重畳し、総合変形時間系列を得、総合変形時間系列に応じて総合変形速力(Comprehensive deformation rate)時間系列を確定することと、
安全係数時間系列と総合変形速力時間系列との対応関係を作成し、対応関係に応じて、少なくとも1つの総合変形速力臨界値を確定し、少なくとも1つの総合変形速力臨界値に基づいて、地滑り体に対して観測警報を行うことと、を含む地滑り観測警報方法を提供する。
【0005】
さらに、複数の観測点の傾向項に応じて、反転して異なる時刻点の最良力学パラメータを得ることは、
複数の観測点の傾向項に応じて、複数の観測点の傾向項と力学パラメータとの加重目的関数
JPEG
2025077974000002.jpg
13
42
を作成し、そのうち、
T(x)
は、目的関数値であり、
TIFF
2025077974000003.tif
6
11
は、i番目の観測点の傾向項と力学パラメータとの間の数学的関係であり、T
Di
は、i番目の観測点の傾向項であり、xは、力学パラメータの組合せベクトルであり、w
i
は、i番目の観測点の傾向項重み値であることと、
異なる時刻点の、目的関数値を最も小さくさせる力学パラメータを計算し、異なる時刻点の最良力学パラメータを得ることと、を含む。
【0006】
さらに、傾向項と力学パラメータとの間の数学的関係は、
JPEG
2025077974000004.jpg
13
37
であり、
そのうち、
JPEG
2025077974000005.jpg
8
5
は、i番目の反転待ちの力学パラメータに対応するフィッティング係数であり、Mは、反転待ちの力学パラメータの数であり、
JPEG
2025077974000006.jpg
8
5
は、プリセット値であり、
JPEG
2025077974000007.jpg
8
5
は、i番目の反転待ちの力学パラメータである。
【0007】
さらに、異なる時刻点の最良力学パラメータに応じて、地滑り体の異なる時刻点での安定性を評価し、地滑り体の安全係数時間系列を得ることは、
異なる時刻点の最良力学パラメータを、プリセットされた地滑り体数値分析モデルに入力し、数値模擬前向計算法により地滑り体の異なる時刻点での安定性を評価し、地滑り体の安全係数時間系列を得る、ことを含む。
【0008】
さらに、複数の観測点の傾向項と周期項をそれぞれ融合し、融合傾向項系列と融合周期項系列を得ることは、
事前に計算された個々の観測点の傾向項重み値に応じて、複数の観測点の傾向項に対して加重結合(Weighted connection)を行い、融合傾向項系列を得ることと、
事前に計算された個々の観測点の周期項重み値に応じて、複数の観測点の周期項に対して加重結合を行い、融合周期項系列を得ることと、を含む。
【0009】
さらに、個々の観測点の傾向項重み値は、
JPEG
2025077974000008.jpg
17
26
に応じて計算され、
そのうち、w
i
は、i番目の観測点の傾向項重み値であり、nは、観測点の数であり、H
i
は、i番目の観測点のエントロピーであり、
JPEG
2025077974000009.jpg
13
38
であり、lは、個々の観測点の傾向項数であり、
JPEG
2025077974000010.jpg
18
29
であり、T
Di
は、i番目の観測点の傾向項である。
【0010】
さらに、個々の観測点の周期項重み値は、
個々の観測点の貯水池水位データ及び降雨量データを取得し、
貯水池水位データ及び降雨量データに応じて、個々の観測点のプリセット時間帯内での最大貯水池水位差、最大貯水池水位変化率、移動平均降雨量、有効降雨量を計算し、
個々の観測点の周期項及び各指標に対して平均値化処理を行った後、周期項と各指標との相関度をそれぞれ計算し、各指標には、最大貯水池水位差、最大貯水池水位変化率、移動平均降雨量及び有効降雨量が含まれ、
相関度に応じて、個々の観測点に対応する相関度モジュラス長(Modulus length of correlation degree)を計算し、
JPEG
2025077974000011.jpg
18
21
に応じて個々の観測点の周期項重み値を計算し、そのうち、
JPEG
2025077974000012.jpg
6
4
は、i番目の観測点の周期項重み値であり、nは、観測点の数であり、Rl
i
は、i番目の観測点に対応する相関度モジュラス長である、方式により計算される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
石家庄鉄道大学
水力駆動型地滑り観測警報方法
3日前
個人
粒子分析装置
28日前
株式会社イシダ
計量装置
22日前
日本精機株式会社
表示装置
8日前
日本精機株式会社
アセンブリ
14日前
株式会社エビス
水準器
7日前
個人
アクセサリー型テスター
29日前
個人
準結晶の解析方法
14日前
株式会社豊田自動織機
自動走行体
13日前
株式会社ミツトヨ
画像測定機
1か月前
個人
浸透探傷試験方法
3日前
栄進化学株式会社
浸透探傷用濃縮液
1か月前
株式会社テイエルブイ
振動検出装置
28日前
株式会社不二越
塵埃噴射装置
2日前
日本碍子株式会社
ガスセンサ
7日前
株式会社東芝
センサ
2日前
トヨタ自動車株式会社
検査装置
22日前
トヨタ自動車株式会社
制御装置
3日前
ダイハツ工業株式会社
試料セル
28日前
トヨタ自動車株式会社
電気自動車
29日前
日本特殊陶業株式会社
ガスセンサ
14日前
日本特殊陶業株式会社
ガスセンサ
1か月前
GEE株式会社
光学特性測定装置
13日前
日本特殊陶業株式会社
ガスセンサ
2日前
大和製衡株式会社
計量装置
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
日本特殊陶業株式会社
ガスセンサ
1日前
東ソー株式会社
簡易型液体クロマトグラフ
24日前
大成建設株式会社
画像表示システム
1か月前
理研計器株式会社
ガス検出器
1か月前
理研計器株式会社
ガス検出器
1か月前
株式会社不二越
X線測定装置
8日前
株式会社不二越
X線測定装置
8日前
株式会社TISM
センサ部材
13日前
株式会社熊谷組
計測システム
1か月前
理研計器株式会社
ガス検出器
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ