TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025079588
公報種別
公開特許公報(A)
公開日
2025-05-22
出願番号
2023192362
出願日
2023-11-10
発明の名称
車両移動量検出装置、車両制御装置及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
40/10 20120101AFI20250515BHJP(車両一般)
要約
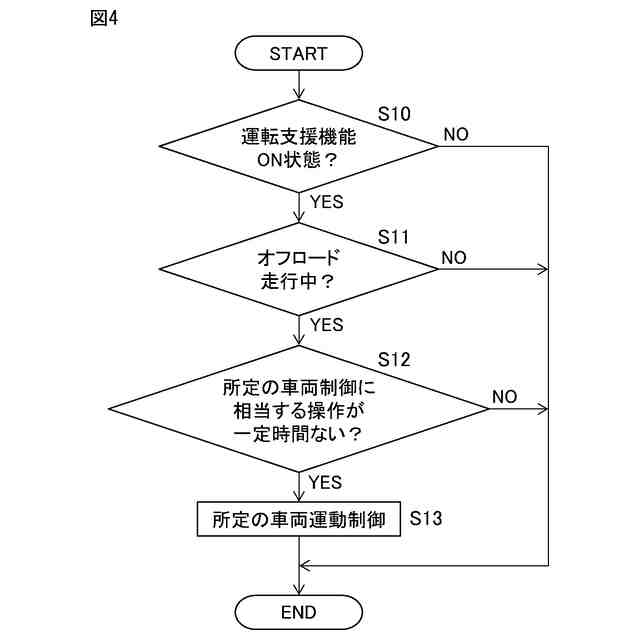
【課題】自車両がオフロードを走行する場合であっても自車両の移動量を算出する。
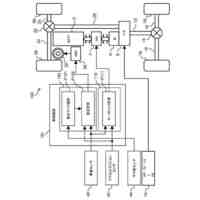
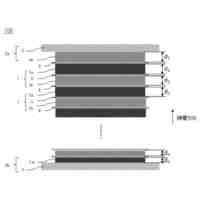
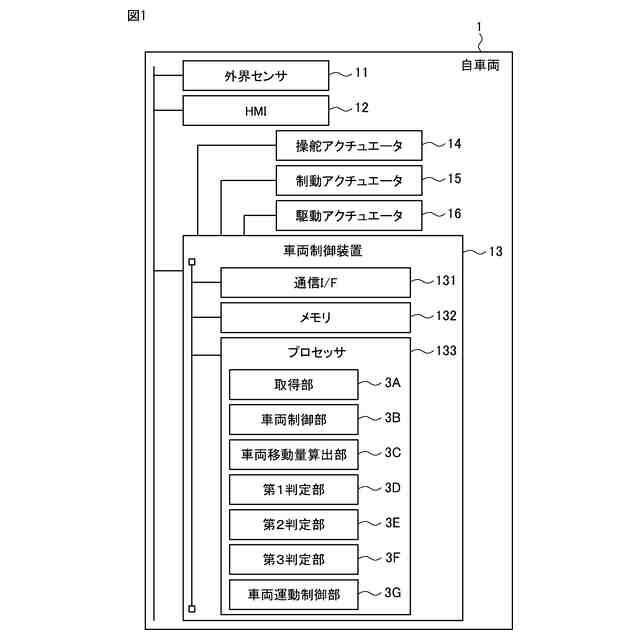
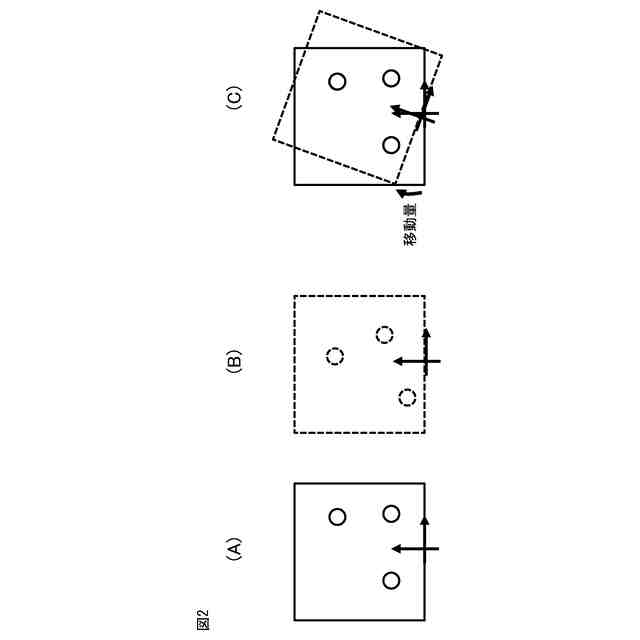
【解決手段】轍を検出可能な外界センサ11を備える自車両1に備えられる車両移動量検出装置は、自車両1がオフロードを走行中に、自車両1の移動前における外界センサ11の検出結果に含まれる轍と、自車両1の移動後における外界センサ11の検出結果に含まれる轍とを特徴点として用い、自車両1の移動前における外界センサ11の検出結果と自車両1の移動後における外界センサ11の検出結果とをマッチングさせることによって、自車両1の移動量を算出する。
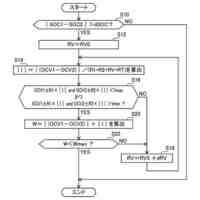
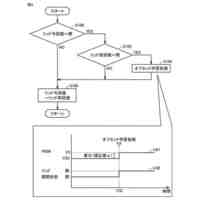
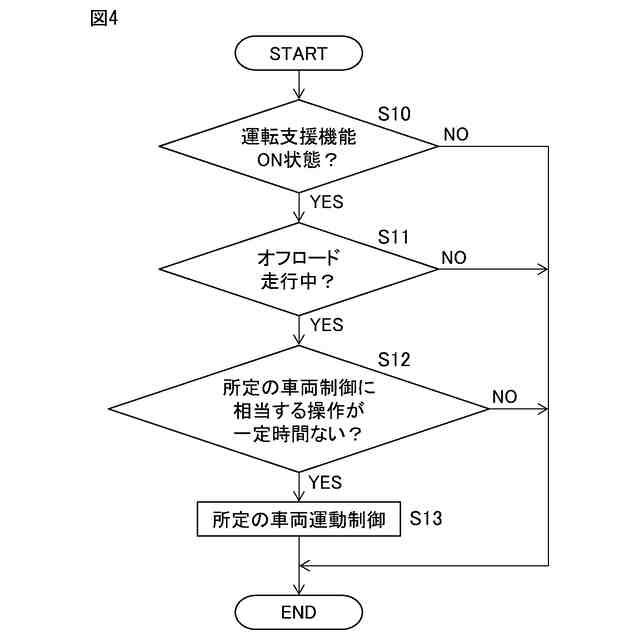
【選択図】図4
特許請求の範囲
【請求項1】
轍を検出可能な外界センサを備える自車両に備えられる車両移動量検出装置であって、
前記自車両がオフロードを走行中に、前記自車両の移動前における前記外界センサの検出結果に含まれる轍と、前記自車両の移動後における前記外界センサの検出結果に含まれる轍とを特徴点として用い、前記自車両の移動前における前記外界センサの検出結果と前記自車両の移動後における前記外界センサの検出結果とをマッチングさせることによって、前記自車両の移動量を算出する、車両移動量検出装置。
続きを表示(約 840 文字)
【請求項2】
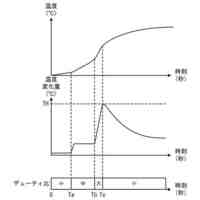
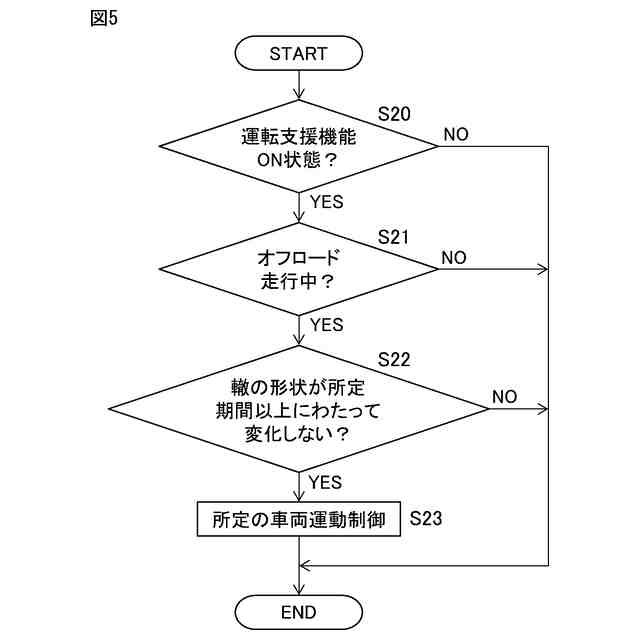
前記外界センサの検出結果に含まれる轍の形状が所定期間以上にわたって変化しない場合に、前記外界センサの検出結果に含まれる轍の形状が変化するように、前記自車両の制御を要求する、請求項1に記載の車両移動量検出装置。
【請求項3】
請求項1に記載の車両移動量検出装置と、
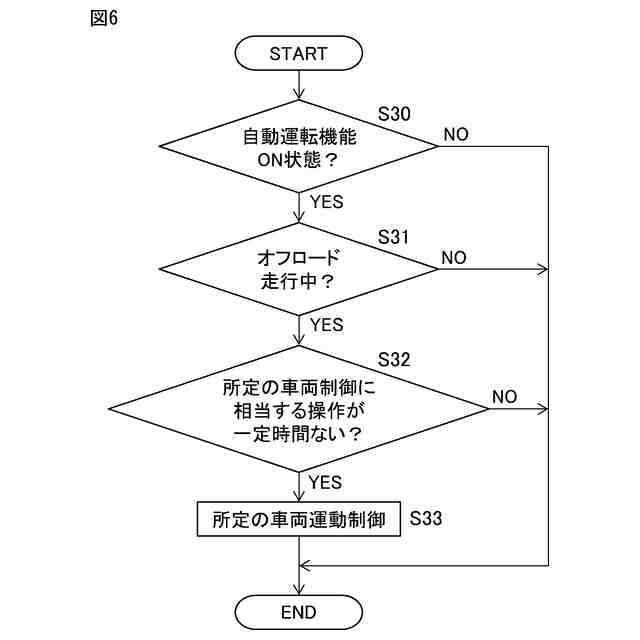
所定の車両制御に相当する操作が一定時間ない場合に、前記外界センサの検出結果に含まれる轍の形状が変化するように、前記自車両の運動を制御する車両運動制御部とを備える、車両制御装置。
【請求項4】
轍を検出可能な外界センサを備える自車両に備えられる車両制御装置であって、
前記自車両がオフロードを走行中に、前記自車両の移動前における前記外界センサの検出結果に含まれる轍と、前記自車両の移動後における前記外界センサの検出結果に含まれる轍とを特徴点として用い、前記自車両の移動前における前記外界センサの検出結果と前記自車両の移動後における前記外界センサの検出結果とをマッチングさせることによって、前記自車両の移動量を算出する車両移動量算出部と、
前記外界センサの検出結果に含まれる轍の形状が所定期間以上にわたって変化しない場合に、前記外界センサの検出結果に含まれる轍の形状が変化するように、前記自車両の運動を制御する車両運動制御部とを備える車両制御装置。
【請求項5】
轍を検出可能な外界センサを備える自車両に備えられるプロセッサに、
前記自車両がオフロードを走行中に、前記自車両の移動前における前記外界センサの検出結果に含まれる轍と、前記自車両の移動後における前記外界センサの検出結果に含まれる轍とを特徴点として用い、前記自車両の移動前における前記外界センサの検出結果と前記自車両の移動後における前記外界センサの検出結果とをマッチングさせることによって、前記自車両の移動量を算出するステップを実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両移動量検出装置、車両制御装置及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、路面画像から抽出された道路標示を構成する第一点群が地図データから抽出された第一線分に整合する部分を探すと共に、路面画像から抽出された道路標示を構成する第二点群が地図データから抽出された第二線分に整合する部分を探すことによって、自車両の位置を算出する技術について記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-096935号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載された技術では、道路標示を構成する第一点群及び第二点群が路面画像から抽出可能であることが前提とされている。一方、自車両がオフロード(例えば砂漠等)を走行する場合には、自車両から路面を撮影しても、路面画像に道路標示が含まれない。そのため、特許文献1に記載された技術では、自車両がオフロードを走行する場合に、自車両の位置を算出することができず、自車両の移動量を算出することができない。
【0005】
上述した点に鑑み、本開示は、自車両がオフロードを走行する場合であっても自車両の移動量を算出することができる車両移動量検出装置、車両制御装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)本開示の一態様は、轍を検出可能な外界センサを備える自車両に備えられる車両移動量検出装置であって、前記自車両がオフロードを走行中に、前記自車両の移動前における前記外界センサの検出結果に含まれる轍と、前記自車両の移動後における前記外界センサの検出結果に含まれる轍とを特徴点として用い、前記自車両の移動前における前記外界センサの検出結果と前記自車両の移動後における前記外界センサの検出結果とをマッチングさせることによって、前記自車両の移動量を算出する、車両移動量検出装置である。
【0007】
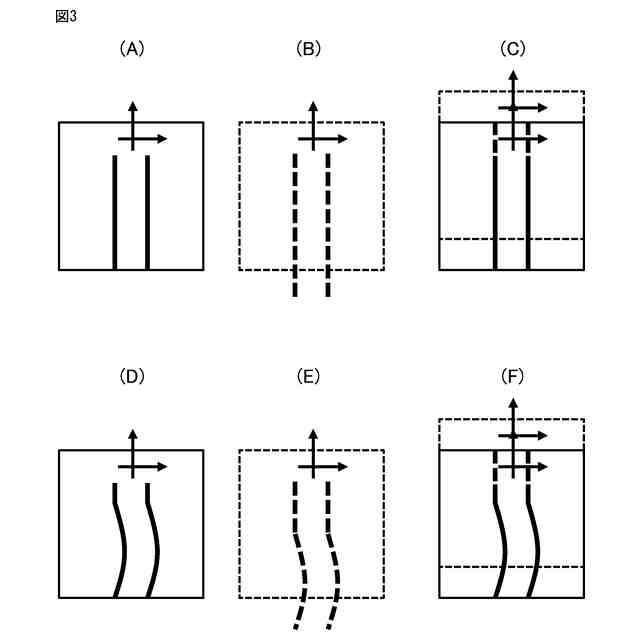
(2)(1)の車両移動量検出装置は、前記外界センサの検出結果に含まれる轍の形状が所定期間以上にわたって変化しない場合に、前記外界センサの検出結果に含まれる轍の形状が変化するように、前記自車両の制御を要求してもよい。
【0008】
(3)本開示の一態様は、(1)に記載の車両移動量検出装置と、所定の車両制御に相当する操作が一定時間ない場合に、前記外界センサの検出結果に含まれる轍の形状が変化するように、前記自車両の運動を制御する車両運動制御部とを備える、車両制御装置である。
【0009】
(4)本開示の一態様は、轍を検出可能な外界センサを備える自車両に備えられる車両制御装置であって、前記自車両がオフロードを走行中に、前記自車両の移動前における前記外界センサの検出結果に含まれる轍と、前記自車両の移動後における前記外界センサの検出結果に含まれる轍とを特徴点として用い、前記自車両の移動前における前記外界センサの検出結果と前記自車両の移動後における前記外界センサの検出結果とをマッチングさせることによって、前記自車両の移動量を算出する車両移動量算出部と、前記外界センサの検出結果に含まれる轍の形状が所定期間以上にわたって変化しない場合に、前記外界センサの検出結果に含まれる轍の形状が変化するように、前記自車両の運動を制御する車両運動制御部とを備える車両制御装置である。
【0010】
(5)本開示の一態様は、轍を検出可能な外界センサを備える自車両に備えられるプロセッサに、前記自車両がオフロードを走行中に、前記自車両の移動前における前記外界センサの検出結果に含まれる轍と、前記自車両の移動後における前記外界センサの検出結果に含まれる轍とを特徴点として用い、前記自車両の移動前における前記外界センサの検出結果と前記自車両の移動後における前記外界センサの検出結果とをマッチングさせることによって、前記自車両の移動量を算出するステップを実行させるためのプログラムである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
電池
2日前
トヨタ自動車株式会社
金型
9日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
電動車
14日前
トヨタ自動車株式会社
電動車
10日前
トヨタ自動車株式会社
電動車
22日前
トヨタ自動車株式会社
組電池
25日前
トヨタ自動車株式会社
電動車
21日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
集合導線
10日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
電源装置
11日前
トヨタ自動車株式会社
電動車両
11日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
ステータ
4日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
二次電池
9日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
蓄電セル
7日前
トヨタ自動車株式会社
ステータ
9日前
トヨタ自動車株式会社
ステータ
9日前
トヨタ自動車株式会社
電池セル
9日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
ステータ
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ