TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025079828
公報種別
公開特許公報(A)
公開日
2025-05-22
出願番号
2025020762,2024018550
出願日
2025-02-12,2018-02-05
発明の名称
情報処理方法、情報処理装置、プログラム、記録媒体、生産システム、ロボットシステム、物品の製造方法
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
9/22 20060101AFI20250515BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボット動作に関する制約条件を満たし、かつ、最適な軌道を確実に生成できるようにする。
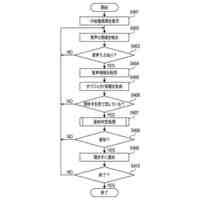
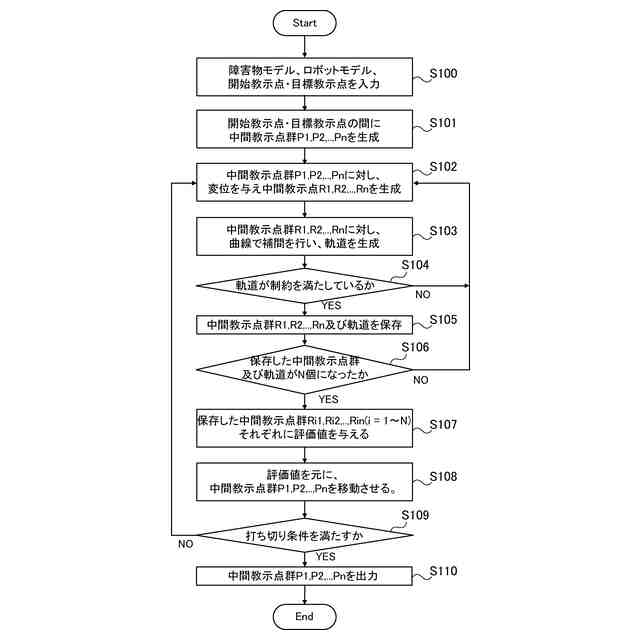
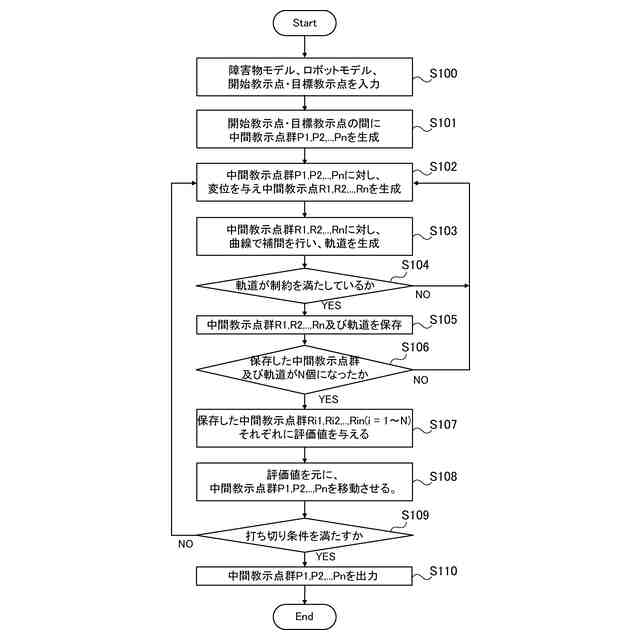
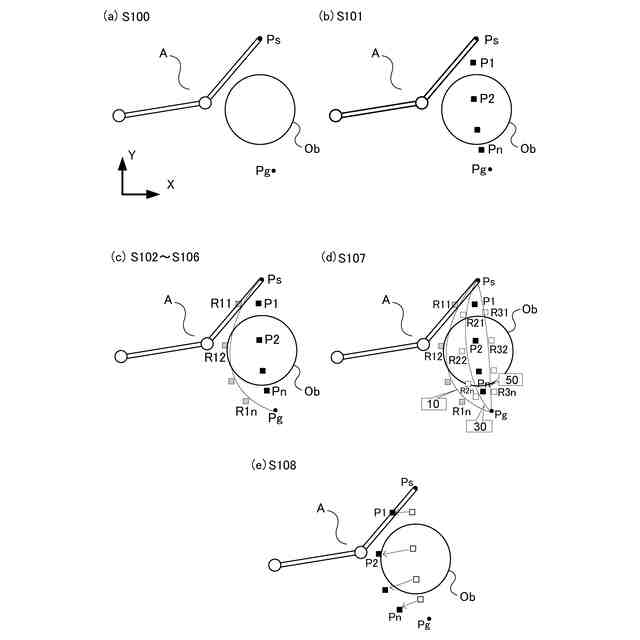
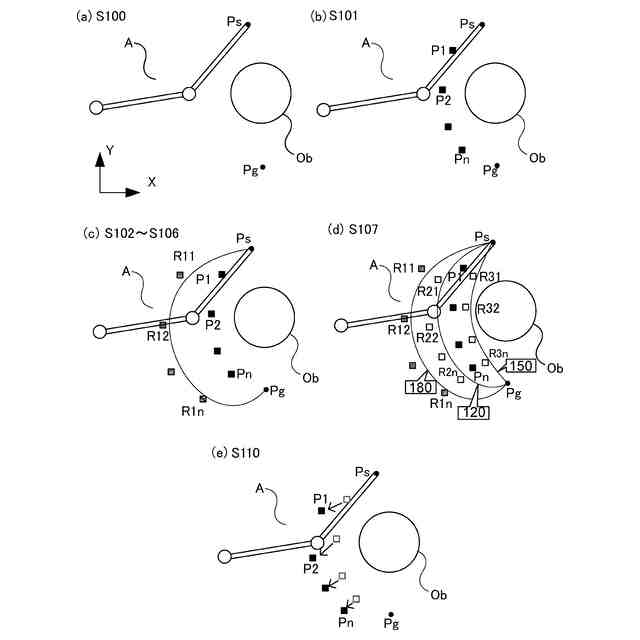
【解決手段】ロボットアーム(A)を動作させる軌道の開始教示点および目標教示点の間の第1の中間教示点群に対して変位を与え、第2の中間教示点群を生成する(S102)。また、第2の中間教示点群に基づき、ロボットアーム(A)の軌道を生成する(S103)。各々の第2の中間教示点群ないしその軌道に対する評価値を生成(S107)し、その評価値に基づき第1の中間教示点群を移動させる(S108)処理を繰り返し実行し、所定の条件を満たす第1の中間教示点群をロボットアームを動作させるための軌道の生成に用いる中間教示点群として決定する(S110)。
【選択図】図4
特許請求の範囲
【請求項1】
ロボットアームを動作させる軌道を取得する情報処理方法において、
前記ロボットアームを動作させたい第1教示点および第2教示点をユーザが設定するのを受け付け、
前記第1教示点から前記第2教示点までの経路を規定する少なくとも2つの中間教示点を取得し、
少なくとも2つの前記中間教示点を群として変位させることで中間教示点群を取得し、
前記中間教示点群に基づき中間軌道を取得し、
前記中間軌道に基づき前記ロボットアームを動作させる軌道を取得する、
ことを特徴とする情報処理方法。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の情報処理方法において、
少なくとも2つの前記中間教示点を変位させ、前記第1教示点および前記第2教示点を変位させないようにして、前記ロボットアームを動作させる軌道を取得する、
ことを特徴とする情報処理方法。
【請求項3】
請求項1または2に記載の情報処理方法において、
少なくとも2つの前記中間教示点を、ポテンシャル法、PRM (Probabilistic RoadMap)、RRT (Rapidly-exploring Random Tree)、可視グラフ法、セル分割法、ボロノイ図法、の少なくとも1つを用いて取得する、
ことを特徴とする情報処理方法。
【請求項4】
請求項1または2に記載の情報処理方法において、
少なくとも2つの前記中間教示点をユーザが設定するのを受け付ける、
ことを特徴とする情報処理方法。
【請求項5】
請求項1から4のいずれか1項に記載の情報処理方法において、
少なくとも2つの前記中間教示点それぞれに値を加算することで群として変位させ、前記中間教示点群を取得する、
ことを特徴とする情報処理方法。
【請求項6】
請求項5に記載の情報処理方法において、
前記変位は相関のある乱数に基づいて付与される、
ことを特徴とする情報処理方法。
【請求項7】
請求項6に記載の情報処理方法において、
少なくとも2つの前記中間教示点は隣り合っており、隣り合った少なくとも2つの前記中間教示点に前記乱数に基づき前記変位を付与する、
ことを特徴とする情報処理方法。
【請求項8】
請求項6または7に記載の情報処理方法において、
分散共分散行列における共分散に正の値を付与することで前記乱数に相関を持たせる、
ことを特徴とする情報処理方法。
【請求項9】
請求項1から8のいずれか1項に記載の情報処理方法において、
少なくとも2つの前記中間教示点を群として変位させることで少なくとも2つの前記中間教示点群を取得し、
少なくとも2つの前記中間教示点群を曲線補間することで少なくとも2つの前記中間軌道を取得し、
曲線補間によって取得した少なくとも2つの前記中間軌道において、前記ロボットアームと物体との干渉を評価する、
ことを特徴とする情報処理方法。
【請求項10】
請求項9に記載の情報処理方法において、
曲線補間によって取得した少なくとも2つの前記中間軌道において、前記ロボットアームと物体との干渉を評価し、曲線補間によって取得した少なくとも2つの前記中間軌道の内、干渉の評価に基づき所定中間軌道を選択し、
前記所定中間軌道をさらに変化させ、前記ロボットアームと物体との干渉を制約条件として用い、前記ロボットアームと物体とが干渉していない新たな少なくとも2つの中間軌道を取得し、
前記新たな少なくとも2つの中間軌道において、前記ロボットアームと物体との干渉以外の項目を評価する、
ことを特徴とする情報処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明はロボットアームの軌道を生成する情報処理方法および情報処理装置に関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
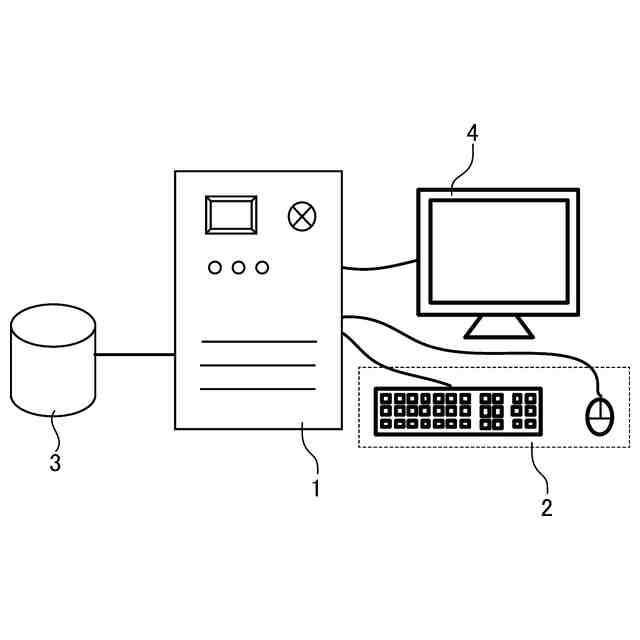
従来より、自動車や電機製品などの工業製品の生産システム(生産ライン)に、産業用のロボット装置を配置して溶接や組み立てなどの作業を自動化する構成が知られている。この種の生産システムでは、ロボット装置、ワーク、ワークの置き台、冶具、その他周辺機器などが互いに干渉(接触、衝突)する可能性がある状態で配置される。近年では、このような生産システムのロボット装置のアームの動作軌道の設計作業において、仮想環境を用いたシミュレーションが利用されることがある。
【0003】
オフラインでシミュレータ装置を使用してロボット装置の動作シミュレーションを行う場合、仮想環境中にロボットアーム、ワーク置き台、冶具、その他の周辺機器などの3D(3次元)モデルを配置する。例えば、このようなシミュレータ装置では、予め作成したロボットアームの教示点の間の軌道を生成し、また、その軌道で仮想環境中のロボットアームの3Dモデルを動作させるシミュレーションを行って検証するものがある。ロボットアームモデルが動作する様子は、シミュレータ装置のディスプレイの仮想表示画面に動画形式などによって表示することができる。
【0004】
当然ながら、ロボットアームの動作軌道によってシミュレーション結果は大きく異なってくる。ロボットアームの軌道が不適切であれば、ロボットアームの動作軌道の一部がロボットアームの動作不可能な領域に入ったり、ロボットアームが他の物体と干渉したり、無駄な動作によって、サイクルタイムが遅くなる場合がある。
【0005】
旧来の手法では、ロボットアームが動作不可能な領域に入ったり、周辺機器とロボットアームが干渉したりしないという条件を満たすロボットアームの教示点をオペレータが画面上で試行錯誤的に作成していた。その場合、可動である、干渉しない、という条件がまず考慮されるため、必ずしも最適な動作速度で動作できるロボット軌道が生成されず、サイクルタイムが遅くなってしまう場合があった。その場合には、ロボットアームの教示点を再検討して設置し直す手動作業を行う必要があった。
【0006】
また、一方で、生産システム(ライン)でロボット装置を用いる場合、工程設計者の教示点作成の工数が大きいので、人件費の高騰も問題となっている。そこで、近年では、教示者による直接教示に代わって、計算機を用いてロボットアームの教示作業を効率化する方法や装置が提案されている。
【0007】
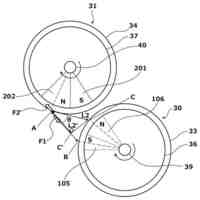
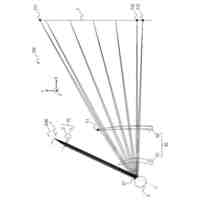
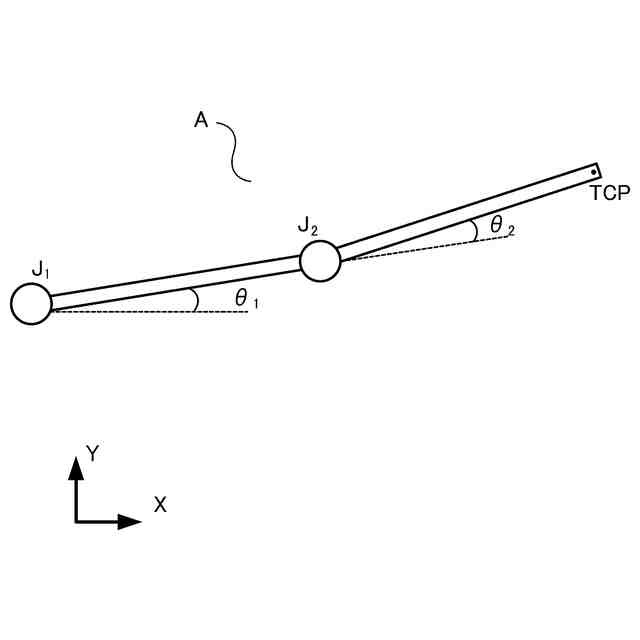
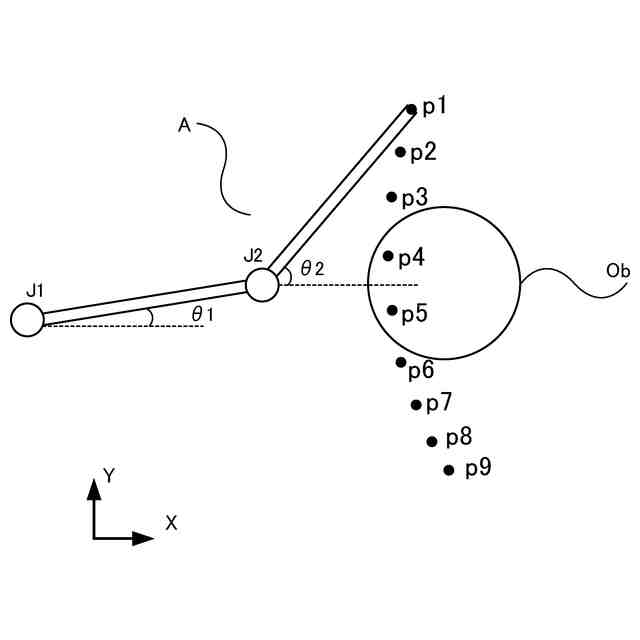
下記の非特許文献1では、ロボットアームの周りの障害物との干渉を回避し、なおかつロボットアームの関節に用いるモータのトルクを最小にする軌道の生成方法が開示されている。図8は、非特許文献1におけるロボットアームの軌道生成の手法を概略的に示している。図8において、ロボットアームAは、J1、および、J2の2つの回転軸を持つ2自由度に簡略化されたロボットアームで、Obは障害物を示している。
【0008】
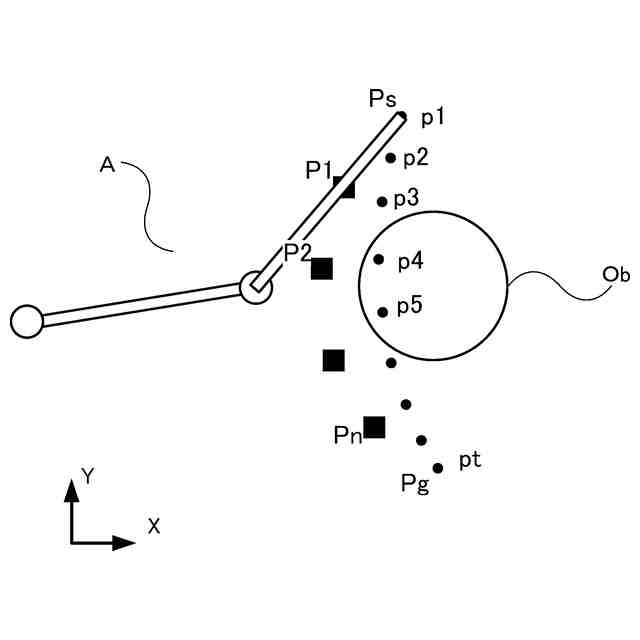
図8において、p1、p2…p9は、それぞれロボットアームAの手先(TCP:Tool Center Point)を移動させる位置を示している。これらの位置のうち、p1は動作の開始位置(開始教示点)を、p9は動作の目標位置(目標教示点)をそれぞれ示している。また、p2~p8は、開始位置(p1)と、目標位置(p9)の間に配置される中間指令値を示している。例えば、制御周期ごとに、p1、p2…p9の姿勢を、ロボットアームAに順に指令し、p1からp9に到達する動作を行わせることができる。この場合、開始位置(p1)と、目標位置(p9)との間のロボットアームの動作時間は、制御周期×(9-1)と計算される。非特許文献1の場合、中間指令値(p2~p8)の数は、あらかじめ定数として決定されており、この場合は7個である。図8では、p4、p5において、ロボットアームと障害物Obが干渉しているが、以下の方法によって干渉回避の可能な軌道を生成することができる。
【0009】
まず、中間指令値p2、p3、…p8に相当する関節角度に対し、滑らかに変位を与え、新たな中間指令値ri2、ri3、…ri8(i = 1、…N)をN個生成する。次に、中間指令値ri2、ri3、…ri8(i = 1、…N)の評価を行い、その評価値を元に、中間指令値p2、p3、…p8を変位させる処理を繰り返すことにより、軌道を最適化する。非特許文献1では、中間指令値の評価値として、ロボットアームAと障害物Obとのめり込み量、各関節軸に用いるモータトルクを用いている。このような評価値を用いることにより、ロボットアームAと、障害物Obが干渉せず、各関節軸に用いるモータトルクが過負荷状態にならない軌道を生成している。
【先行技術文献】
【非特許文献】
【0010】
Kalakrishnan, Mrinal, et al. "STOMP: Stochastic trajectory optimization for motion planning." Robotics and Automation (ICRA), 2011 IEEE International Conference on IEEE, 2011.
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
21日前
キヤノン株式会社
電子機器
24日前
キヤノン株式会社
現像装置
8日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
28日前
キヤノン株式会社
培養装置
1か月前
キヤノン株式会社
電子機器
13日前
キヤノン株式会社
培養装置
1か月前
キヤノン株式会社
記録装置
22日前
キヤノン株式会社
培養装置
1か月前
キヤノン株式会社
撮像装置
28日前
キヤノン株式会社
撮像装置
22日前
キヤノン株式会社
清掃装置
7日前
キヤノン株式会社
撮像装置
24日前
キヤノン株式会社
現像装置
8日前
キヤノン株式会社
撮像装置
7日前
キヤノン株式会社
撮像装置
20日前
キヤノン株式会社
現像装置
8日前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
通信装置
8日前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
電子機器
28日前
キヤノン株式会社
プログラム
1か月前
キヤノン株式会社
プログラム
1か月前
キヤノン株式会社
プログラム
1か月前
キヤノン株式会社
光走査装置
1日前
キヤノン株式会社
画像形成装置
1か月前
キヤノン株式会社
培養システム
1か月前
キヤノン株式会社
情報処理装置
9日前
キヤノン株式会社
画像形成装置
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ