TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025080599
公報種別
公開特許公報(A)
公開日
2025-05-26
出願番号
2023193856
出願日
2023-11-14
発明の名称
監視装置、監視方法および監視プログラム
出願人
パイオニア株式会社
代理人
個人
主分類
B60R
25/31 20130101AFI20250519BHJP(車両一般)
要約
【課題】車両に対する危険の有無を精度高く判定する。
【解決手段】監視装置100は、車体のサイズに関する情報を取得する取得部121と、取得部121により取得された情報に応じて、動体センサによって検知される動体の進行方向に関するリスク値の設定を変更する変更部126とを有することを特徴とする。
【選択図】図11
特許請求の範囲
【請求項1】
車体のサイズに関する情報を取得する取得部と、
前記取得部により取得された情報に応じて、動体センサによって検知される動体の進行方向に関するリスク値の設定を変更する変更部と
を有することを特徴とする監視装置。
続きを表示(約 620 文字)
【請求項2】
前記車体のサイズに関する情報は、ボディタイプであることを特徴とする請求項1に記載の監視装置。
【請求項3】
前記車体のサイズに関する情報は、車種であることを特徴とする請求項1に記載の監視装置。
【請求項4】
前記取得部は、前記車体のサイズに関する情報に加えて、前記動体センサの取付位置の情報を取得する
ことを特徴とする請求項1に記載の監視装置。
【請求項5】
前記変更部は、
前記取得部により取得された前記情報に応じて、前記動体の進行方向に関するリスク値の設定と、前記動体の位置に関するリスク値の設定とを変更する
ことを特徴とする請求項1に記載の監視装置。
【請求項6】
監視装置が実行する方法であって、
車体のサイズに関する情報を取得する取得工程と、
前記取得工程により取得された情報に応じて、動体センサによって検知される動体の進行方向に関するリスク値の設定を変更する変更工程と
を含むことを特徴とする監視方法。
【請求項7】
車体のサイズに関する情報を取得する取得ステップと、
前記取得ステップにより取得された情報に応じて、動体センサによって検知される動体の進行方向に関するリスク値の設定を変更する変更ステップと
をコンピュータに実行させることを特徴とする監視プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、監視装置、監視方法および監視プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、車両の安否を判断し、違法行為がされる前に注意喚起又は警告を発することで、車両に損害が生じることを防止する技術が存在する(例えば、特許技術文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2013-228912号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、車両に対する危険の有無を精度高く判定できない場合がある。例えば、車両に対する危険の有無は、動体センサが検知した動体と車両との位置関係に基づいて判定されるが、動体と車両との位置関係は、車両のサイズによって変わる場合がある。このように、本発明が解決しようとする課題としては、上述した問題が一例として挙げられる。
【課題を解決するための手段】
【0005】
上述した課題を解決し、目的を達成するため、請求項1に記載の発明は、車体のサイズに関する情報を取得する取得部と、前記取得部により取得された情報に応じて、動体センサによって検知される動体の進行方向に関するリスク値の設定を変更する変更部とを有することを特徴とする。
【0006】
請求項6に記載の発明は、監視装置が実行する方法であって、車体のサイズに関する情報を取得する取得工程と、前記取得工程により取得された情報に応じて、動体センサによって検知される動体の進行方向に関するリスク値の設定を変更する変更工程とを含むことを特徴とする。
【0007】
請求項7に記載の発明は、車体のサイズに関する情報を取得する取得ステップと、前記取得ステップにより取得された情報に応じて、動体センサによって検知される動体の進行方向に関するリスク値の設定を変更する変更ステップとをコンピュータに実行させることを特徴とする。
【図面の簡単な説明】
【0008】
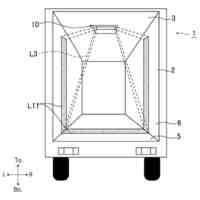
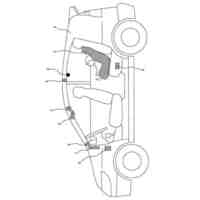
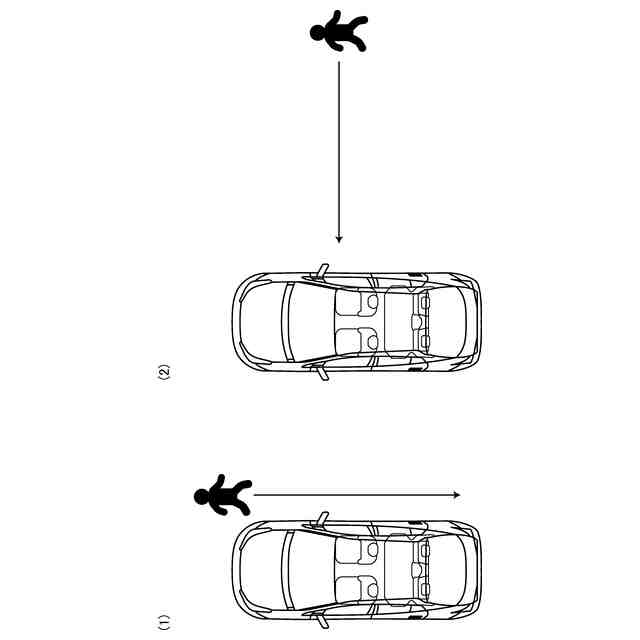
図1は、従来技術の課題の一例を示す図である。
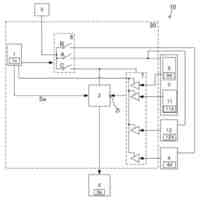
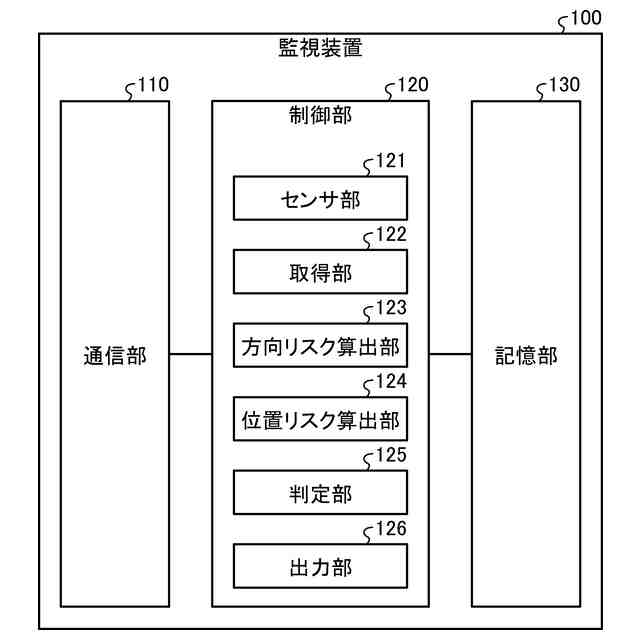
図2は、実施形態に係る監視装置の構成の一例を示す図である。
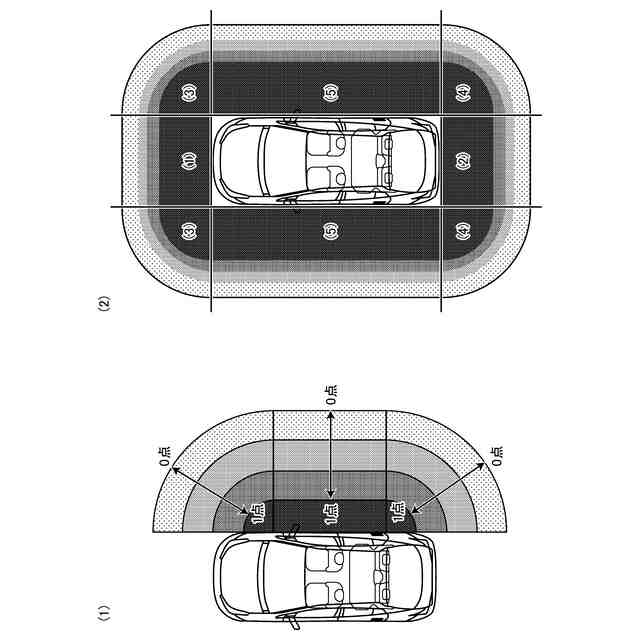
図3は、実施形態に係る監視装置による方向リスク算出処理の一例を示す図である。
図4は、実施形態に係る監視装置による方向リスク算出処理の流れの一例を示すフローチャートである。
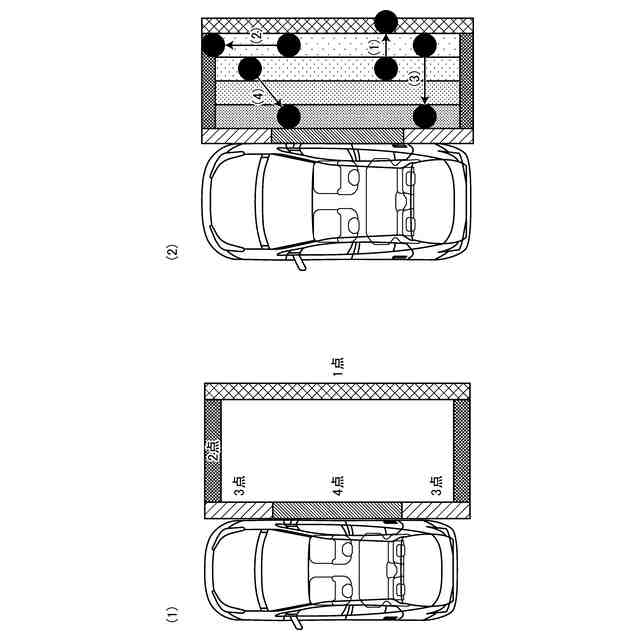
図5は、実施形態に係る監視装置による位置リスク算出処理の一例を示す図である。
図6は、実施形態に係る監視装置による位置リスク算出処理の一例を示す図である。
図7は、実施形態に係る監視装置による位置リスク算出処理の流れの一例を示すフローチャートである。
図8は、実施形態に係る監視装置による判定処理の一例を示す図である。
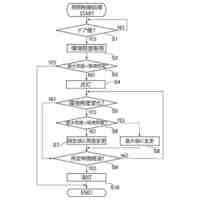
図9は、実施形態に係る監視装置による処理の流れの一例を示すフローチャートである。
図10は、実施形態に係る監視装置の構成の一例を示す図である。
図11は、実施形態に係る監視装置による変更処理の一例を示す図である。
図12は、実施形態に係る監視装置による変更処理の一例を示す図である。
図13は、実施形態に係る監視装置による処理の一例を示すフローチャートである。
図14は、実施形態に係る監視装置システムの構成の一例を示す図である。
図15は、実施形態に係る監視装置の構成の一例を示す図である。
図16は、監視装置の機能を実現するコンピュータの一例を示すハードウェア構成図である。
【発明を実施するための形態】
【0009】
以下に、図面を参照しつつ、本発明を実施するための形態(以下、実施の形態)について説明する。なお、以下に説明する実施の形態によって本発明が限定されるものではない。さらに、図面の記載において、同一の部分には同一の符号を付している。
【0010】
[第1の実施形態]
〔1.概要〕
まず、第1の実施形態に係る監視装置100の概要について説明する。監視装置100は、車両に対する危険の有無を判定する装置である。ここで、従来技術の課題の一例について図1を用いて説明する。図1は、従来技術の課題の一例を説明するための図である。従来、駐車中の車両を自動車窃盗や車上荒らし等の行為から防犯する目的で、駐車中の車両の監視が行われている。このような駐車中の車両の監視を行う装置等では、車両と動体との距離の情報から車両に対して危険が及ぶ可能性が判定を行う場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
4日前
個人
飛行自動車
3か月前
個人
車窓用防虫網戸
25日前
個人
警告装置
1か月前
個人
小型EVシステム
1か月前
日本精機株式会社
ケース
2か月前
個人
車輪清掃装置
8日前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
個人
アンチロール制御装置
2か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
照明装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
個人
ブレーキシステム
2か月前
株式会社松華
懸架装置
2か月前
個人
ワイパーゴム性能保持具
17日前
個人
ステージカー
2か月前
個人
自動車ドア開度規制ベルト
1か月前
井関農機株式会社
収穫作業車両
24日前
株式会社クラベ
ヒータユニット
23日前
個人
自走式立体型洗車場
2か月前
横浜ゴム株式会社
タイヤ
2か月前
日本精機株式会社
車両用照明装置
3か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
株式会社ユーシン
照明装置
1か月前
日本精機株式会社
車両用表示装置
25日前
帝国繊維株式会社
作業車両
1か月前
日本精機株式会社
車両用表示装置
2か月前
マツダ株式会社
車両
3か月前
日本精機株式会社
車両用表示装置
19日前
日本精機株式会社
車両用表示装置
2か月前
マツダ株式会社
車両
3か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ