TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025088573
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023203354
出願日
2023-11-30
発明の名称
車載用制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人アイテック国際特許事務所
主分類
B60W
30/19 20120101AFI20250604BHJP(車両一般)
要約
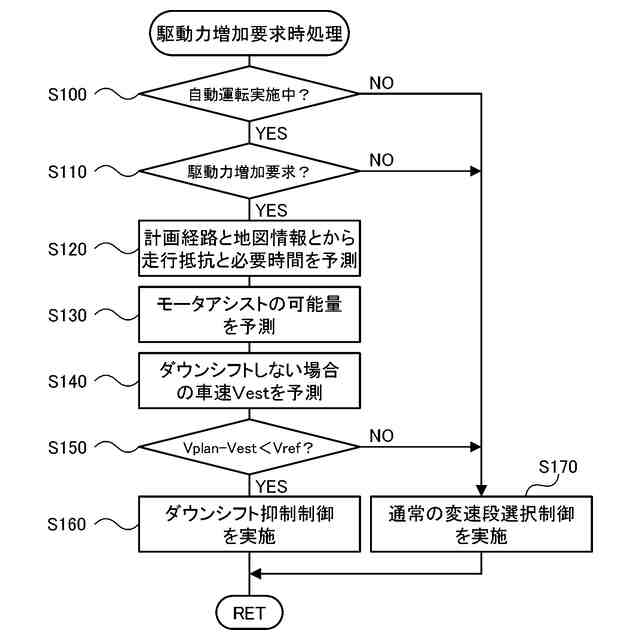
【課題】自動運転制御中の駆動力増加要求に対して変速機のダウンシフトを抑制してドライバビリティを向上させる。
【解決手段】車載用制御装置は、エンジンと、エンジンの動力を変速して駆動輪に連結された駆動軸に出力する変速機と、駆動軸に動力を入出力可能な電動機と、電動機に電力の入出力が可能な蓄電装置と、操舵装置と、を備える自動車に搭載される。車載用制御装置は、自動運転制御中に車両を所定目標状態とするために駆動力増加要求が行なわれた駆動増加力要求時には、変速機のダウンシフトを伴う駆動力増加に比して変速機のダウンシフトを伴わずに電動機からの駆動力増加を優先して行なう。
【選択図】図3
特許請求の範囲
【請求項1】
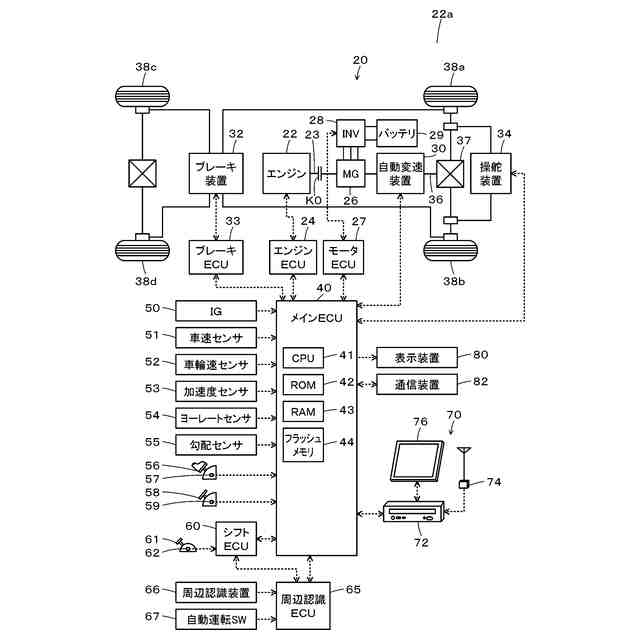
エンジンと、前記エンジンの動力を変速して駆動輪に連結された駆動軸に出力する変速機と、前記駆動軸に動力を入出力可能な電動機と、前記電動機に電力の入出力が可能な蓄電装置と、操舵装置と、を備える自動車に搭載され、車両が自動運転により走行するように前記エンジンと前記変速機と前記電動機と前記操舵装置とを制御する自動運転制御と車両が手動運転により走行するように前記エンジンと前記変速機と前記電動機と前記操舵装置とを制御する手動運転制御とを含む複数の運転制御を実行する車載用制御装置であって、
前記自動運転制御中に車両を所定目標状態とするために駆動力増加要求が行なわれた駆動増加力要求時には、前記変速機のダウンシフトを伴う駆動力増加に比して前記変速機のダウンシフトを伴わずに前記電動機からの駆動力増加を優先して行なう、
ことを特徴とする車載用制御装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1記載の車載用制御装置であって、
前記駆動力増加要求時に、前記電動機から駆動力増加により予測される予測状態が前記所定目標状態から許容範囲内のときには前記変速機のダウンシフトを伴わずに前記電動機からの駆動力贈加を行ない、前記予測状態が許容範囲外のときには前記変速機のダウンシフトを伴って前記エンジンからの駆動力増加を行なう、
車載用制御装置。
【請求項3】
請求項1記載の車載用制御装置であって、
前記駆動力増加要求時に、前記エンジンから変速を伴わずに増加可能な駆動力増加と前記電動機から駆動力増加とにより予測される予測状態が前記所定目標状態から許容範囲内のときには前記エンジンから変速を伴わずに増加可能な駆動力増加と前記電動機からの駆動力贈加を行ない、前記予測状態が許容範囲外のときには前記変速機のダウンシフトを伴って前記エンジンからの駆動力増加を行なう、
車載用制御装置。
【請求項4】
請求項2または3記載の車載用制御装置であって、
前記蓄電装置から出力可能な許容出力電力の範囲内で前記予測状態を予測する、
車載用制御装置。
【請求項5】
請求項4記載の車載用制御装置であって、
前記蓄電装置から出力可能な許容出力電力の範囲内で前記電動機から駆動力増加可能な電動機必要電力と前記蓄電装置から前記電動機必要電力を継続して出力できる許容継続時間とに基づいて前記予測状態を予測する、
車載用制御装置。
【請求項6】
エンジンと、前記エンジンの動力を変速して駆動輪に連結された駆動軸に出力する変速機と、前記駆動軸に動力を入出力可能な電動機と、前記電動機に電力の入出力が可能な蓄電装置と、操舵装置と、を備える自動車に搭載され、車両が自動運転により走行するように前記エンジンと前記変速機と前記電動機と前記操舵装置とを制御する自動運転制御と車両が手動運転により走行するように前記エンジンと前記変速機と前記電動機と前記操舵装置とを制御する手動運転制御とを含む複数の運転制御を実行する車載用制御装置であって、
前記自動運転制御中に車両を所定目標状態とするために駆動力増加要求が行なわれた駆動増加力要求時には、前記エンジンによる駆動力増加に比して前記電動機による駆動力増加を優先して行なう、
ことを特徴とする車載用制御装置。
【請求項7】
請求項1または6記載の車載用制御装置であって、
前記駆動増加力要求時には、前記手動運転制御に比して前記変速機のダウンシフトを伴う駆動力増加より前記変速機のダウンシフトを伴わずに前記電動機からの駆動力増加を優先して行なう、
車載用制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車載用制御装置に関し、詳しくは、自動車に搭載されて自動運転制御と手動運転制御とを含む複数の運転制御を実行する車載用制御装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、この種の車載用制御装置としては、自動運転制御を実施中に要求駆動力の増加が予測される場合、要求駆動力の増加タイミングまで車両の車速を維持あるいは減速しつつ、要求駆動力の増加タイミングまでの待機期間内でエンジンの回転数を上昇させ、エンジン回転数の上昇に応じてエンジンのトルクを低下させ、自動変速機の変速段を下方にシフトさせるものが提案されている(例えば、特許文献1参照)。この車載用制御装置では、上記制御により、自動運転中に要求駆動力の増加が予測されるとき、ダウンシフトに起因する振動、騒音および変速ショックを低減するものとしている。
【先行技術文献】
【特許文献】
【0003】
特開2021-160537号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の車載用制御装置では、僅かな勾配による要求駆動力の増加やカーブの走行に伴う要求駆動力の増加が予測されるときにもダウンシフトが行なわれる場合が生じる。この場合、運転者や搭乗者に予期しないダウンシフトによる変速ショックやエンジン回転数の増加による騒音を与えことになり、ドライバビリティを低下させてしまう。
【0005】
本開示の車載用制御装置は、自動運転制御中の駆動力増加要求に対して変速機のダウンシフトを抑制してドライバビリティを向上させることを主目的とする。
【課題を解決するための手段】
【0006】
本開示の車載用制御装置は、上述の主目的を達成するために以下の手段を採った。
【0007】
本開示の車載用制御装置は、
エンジンと、前記エンジンの動力を変速して駆動輪に連結された駆動軸に出力する変速機と、前記駆動軸に動力を入出力可能な電動機と、前記電動機に電力の入出力が可能な蓄電装置と、操舵装置と、を備える自動車に搭載され、車両が自動運転により走行するように前記エンジンと前記変速機と前記電動機と前記操舵装置とを制御する自動運転制御と車両が手動運転により走行するように前記エンジンと前記変速機と前記電動機と前記操舵装置とを制御する手動運転制御とを含む複数の運転制御を実行する車載用制御装置であって、
前記自動運転制御中に車両を所定目標状態とするために駆動力増加要求が行なわれた駆動増加力要求時には、前記変速機のダウンシフトを伴う駆動力増加に比して前記変速機のダウンシフトを伴わずに前記電動機からの駆動力増加を優先して行なう、
ことを特徴とする。
【0008】
本開示の車載用制御装置は、エンジンと、エンジンの動力を変速して駆動輪に連結された駆動軸に出力する変速機と、駆動軸に動力を入出力可能な電動機と、電動機に電力の入出力が可能な蓄電装置と、操舵装置と、を備える自動車に搭載され、車両が自動運転により走行するようにエンジンと変速機と電動機と操舵装置とを制御する自動運転制御と車両が手動運転により走行するようにエンジンと変速機と電動機と操舵装置とを制御する手動運転制御とを含む複数の運転制御を実行する。車載用制御装置は、自動運転制御中に車両を所定目標状態とするために駆動力増加要求が行なわれた駆動増加力要求時には、変速機のダウンシフトを伴う駆動力増加に比して変速機のダウンシフトを伴わずに電動機からの駆動力増加を優先して行なう。このように駆動力増加要求が行なわれたときには、変速機のダウンシフトを伴う駆動力増加に比して変速機のダウンシフトを伴わずに電動機からの駆動力増加を優先して行なうことにより、変速機のダウンシフトを抑制することができ、変速機のダウンシフトに伴う変速ショックやエンジンの回転数の急増による騒音を抑制することができる。この結果、ドライバビリティを向上させることができる。ここで、所定目標状態としては、走行経路における自動運転する際の各区域の走行予定の車速や加速度、ユーザが設定した車速や加速度、法定車速などが含まれる。
【0009】
本開示の車載用制御装置において、前記駆動力増加要求時に、前記電動機から駆動力増加により予測される予測状態が前記所定目標状態から許容範囲内のときには前記変速機のダウンシフトを伴わずに前記電動機からの駆動力贈加を行ない、前記予測状態が許容範囲外のときには前記変速機のダウンシフトを伴って前記エンジンからの駆動力増加を行なうものとしてもよい。こうすれば、予測状態が所定目標状態から許容範囲内のときには変速機のダウンシフトなしに走行することができ、予測状態が所定目標状態から許容範囲外のときには変速機のダウンシフトを伴うものの車両を迅速に所定目標状態として走行することができる。
【0010】
本開示の車載用制御装置において、前記駆動力増加要求時に、前記エンジンから変速を伴わずに増加可能な駆動力増加と前記電動機から駆動力増加とにより予測される予測状態が前記所定目標状態から許容範囲内のときには前記エンジンから変速を伴わずに増加可能な駆動力増加と前記電動機からの駆動力贈加を行ない、前記予測状態が許容範囲外のときには前記変速機のダウンシフトを伴って前記エンジンからの駆動力増加を行なうものとしてもよい。こうすれば、予測状態が所定目標状態から許容範囲内のときには変速機のダウンシフトなしに走行することができ、予測状態が所定目標状態から許容範囲外のときには変速機のダウンシフトを伴うものの車両を迅速に所定目標状態として走行することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
端末
5日前
トヨタ自動車株式会社
電池
18日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
方法
6日前
トヨタ自動車株式会社
組電池
4日前
トヨタ自動車株式会社
モータ
10日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
モータ
12日前
トヨタ自動車株式会社
組電池
5日前
トヨタ自動車株式会社
パネル
12日前
トヨタ自動車株式会社
モータ
13日前
トヨタ自動車株式会社
モータ
13日前
トヨタ自動車株式会社
二次電池
16日前
トヨタ自動車株式会社
冷却装置
4日前
トヨタ自動車株式会社
蓄電セル
13日前
トヨタ自動車株式会社
蓄電装置
5日前
トヨタ自動車株式会社
電源装置
12日前
トヨタ自動車株式会社
製造装置
17日前
トヨタ自動車株式会社
回転電機
13日前
トヨタ自動車株式会社
情報機器
12日前
トヨタ自動車株式会社
燃料電池
6日前
トヨタ自動車株式会社
蓄電装置
19日前
トヨタ自動車株式会社
剥離装置
17日前
トヨタ自動車株式会社
二次電池
5日前
トヨタ自動車株式会社
内燃機関
13日前
トヨタ自動車株式会社
水系電池
9日前
トヨタ自動車株式会社
ドローン
17日前
トヨタ自動車株式会社
電動車両
16日前
トヨタ自動車株式会社
二次電池
18日前
トヨタ自動車株式会社
ステータ
20日前
トヨタ自動車株式会社
内燃機関
9日前
トヨタ自動車株式会社
予測方法
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ