TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092969
公報種別
公開特許公報(A)
公開日
2025-06-23
出願番号
2023208417
出願日
2023-12-11
発明の名称
情報処理装置、移動体システムおよび情報処理方法
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/246 20240101AFI20250616BHJP(制御;調整)
要約
【課題】低負荷の作業で十分な精度の地図データを作成する。
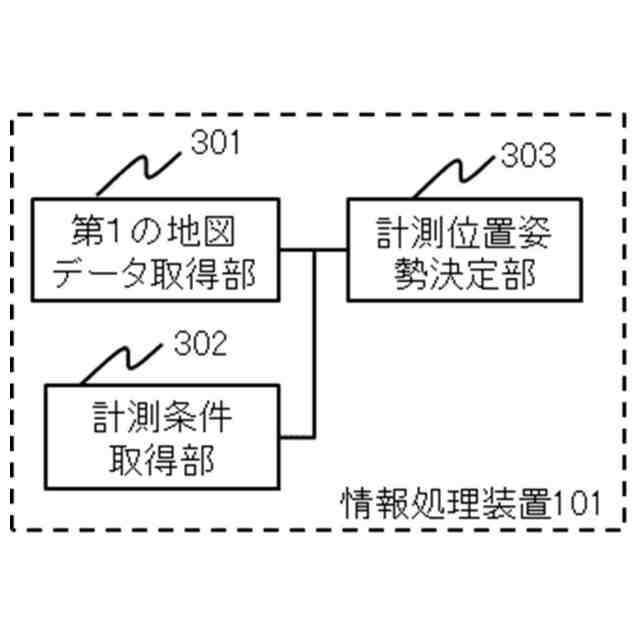
【解決手段】情報処理装置101は、センサ103が移動する環境の形状を示す第1の地図データと環境においてセンサが計測を行う際の計測条件とを取得する取得手段301、302と、計測により得られるセンサ情報を用いて第2の地図データを作成するために計測を行うセンサの位置である計測位置を、第1の地図データと計測条件とに基づいて決定する決定手段303とを有する。
【選択図】図3
特許請求の範囲
【請求項1】
センサが移動する環境の形状を示す第1の地図データと前記環境において前記センサが計測を行う際の計測条件とを取得する取得手段と、
前記計測により得られるセンサ情報を用いて第2の地図データを作成するために前記計測を行う前記センサの位置である計測位置を、前記第1の地図データと前記計測条件とに基づいて決定する決定手段とを有することを特徴とする情報処理装置。
続きを表示(約 920 文字)
【請求項2】
前記決定手段は、前記第1の地図データと前記計測条件とに基づいて、前記計測位置において前記計測を行うときの前記センサの姿勢である計測姿勢を決定することを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記センサ情報を用いて前記第2の地図データを作成する作成手段をさらに有することを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記計測条件は、前記センサの計測範囲と、互いに隣り合う前記計測位置からの前記計測範囲のオーバーラップ量とを含むことを特徴とする請求項1に記載の情報処理装置。
【請求項5】
前記計測条件は、前記環境内の物体に対する最小計測距離を含むことを特徴とする請求項1に記載の情報処理装置。
【請求項6】
前記計測条件は、前記環境における領域ごとの前記センサが前記計測を行う方向と、前記センサの移動方向に対する前記計測を行う向きと、前記環境における領域または方向ごとの前記計測位置の密度のうち少なくとも1つを含むことを特徴とする請求項1に記載の情報処理装置。
【請求項7】
前記センサは、前記計測としての撮影を行う撮影装置であり、
前記センサ情報は、前記撮影装置により取得された撮影画像であることを特徴とする請求項1に記載の情報処理装置。
【請求項8】
前記決定手段は、前記環境内で移動可能な移動体に搭載された前記センサから前記センサ情報を取得することを特徴とする請求項1に記載の情報処理装置。
【請求項9】
前記計測位置が複数ある場合において、前記センサの移動履歴に基づいて、前記複数の計測位置のそれぞれでの前記計測が行われたか否かを判定する判定手段を有することを特徴とする請求項1に記載の情報処理装置。
【請求項10】
前記判定手段は、前記第1の地図データと、前記センサが前記計測位置に移動した際に該センサとは別のセンサから取得した計測結果とを用いて前記移動履歴を取得することを特徴とする請求項9に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、電子的な地図を使用して移動するセンサの位置や姿勢を推定する技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
工場や物流倉庫等で使用される無人搬送車であるAGV(Automated Guided Vehicle)の制御やVR(Virtual Reality)等で使用されるHMD(Head Mounted Display)の位置や姿勢の推定には、LiDAR(Laser Imaging Detection and Ranging)やカメラをセンサとして使用するSLAM(Simultaneous Localization and Mapping)技術が用いられる。特許文献1には、
また、これらの技術で使用される電子地図データを作成するためのセンサの計測位置を決定する方法が特許文献2に開示されている。この方法では、HMDに装着されたカメラが撮影範囲内の複数の所定の位置を網羅的に通過するようにHMDを装着したユーザを誘導する。
【先行技術文献】
【特許文献】
【0003】
特開2020-67439号公報
特開2019-20997号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献2にて開示された方法では、通過する位置の数が少ないと作成される地図データの精度が不十分になり易く、通過する位置の数が多いとユーザの作業負荷が高くなり易い。
【0005】
本発明は、低負荷の作業で十分な精度の地図データを作成できるようにした情報処理装置等を提供する。
【課題を解決するための手段】
【0006】
本発明の一側面としての情報処理装置(情報処理方法)は、センサが移動する環境の形状を示す第1の地図データと環境においてセンサが計測を行う際の計測条件とを取得する取得手段(ステップ)と、計測により得られるセンサ情報を用いて第2の地図データを作成するために計測を行うセンサの位置である計測位置を、第1の地図データと計測条件とに基づいて決定する決定手段(ステップ)とを有することを特徴とする。なお、上記情報処理装置とセンサを含む情報処理システムや該情報処理システムを移動体に搭載した移動体システムも本発明の他の一側面を構成する。また上記情報処理方法に従う処理をコンピュータに実行させるプログラムも、本発明の他の一側面を構成する。
【発明の効果】
【0007】
本発明によれば、低負荷の作業で十分な精度の地図データを作成するための計測位置を決定することができる。
【図面の簡単な説明】
【0008】
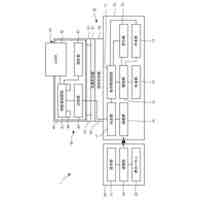
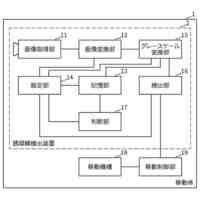
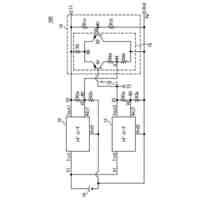
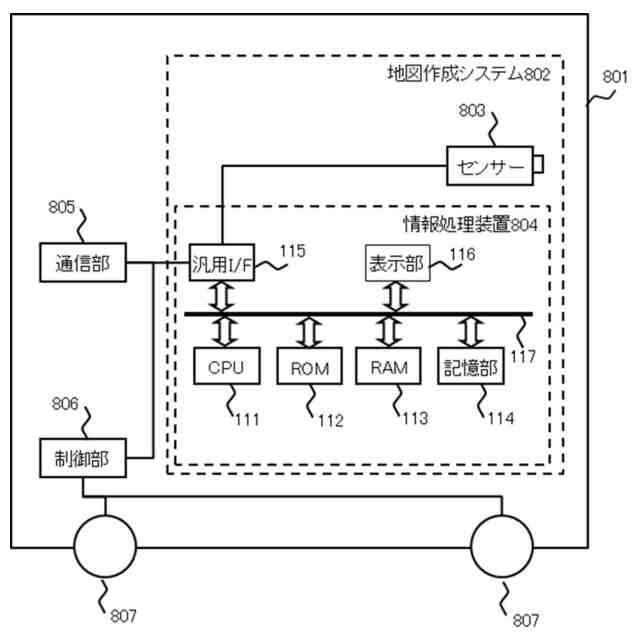
実施例1における情報処理装置の構成を示す図。
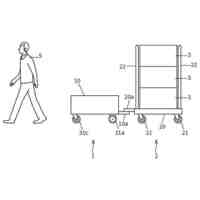
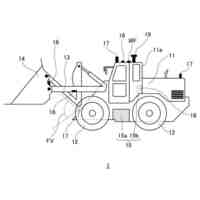
実施例1の利用シーンを説明する図。
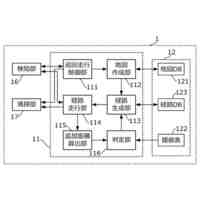
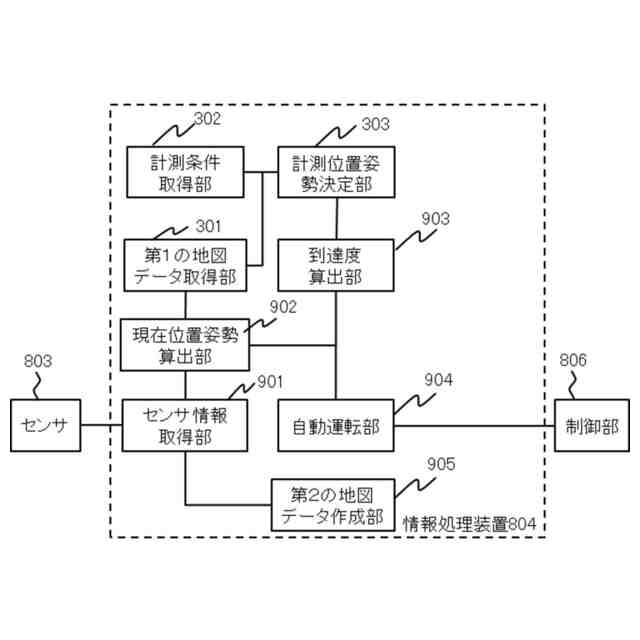
実施例1における情報処理装置の論理的構成を示すブロック図。
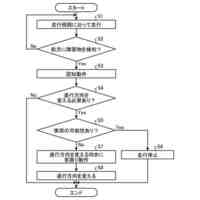
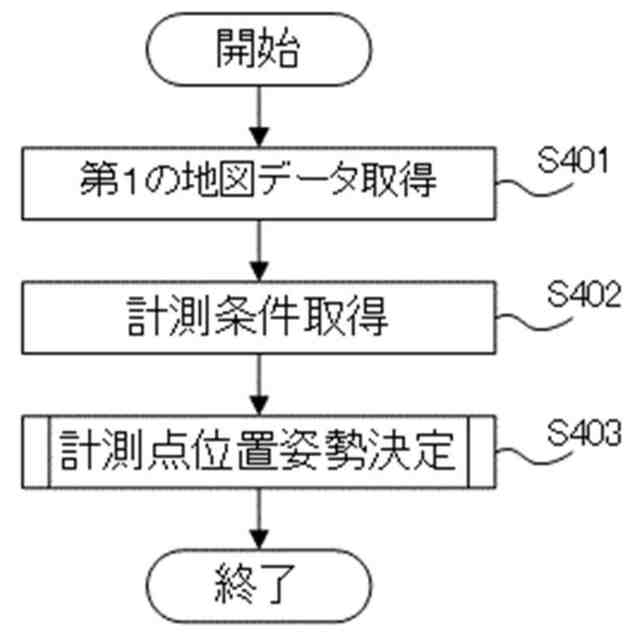
実施例1における情報処理を示すフローチャート。
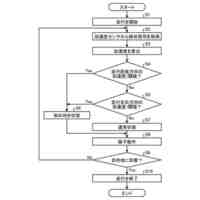
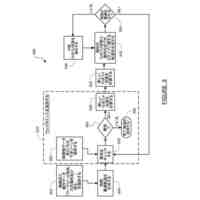
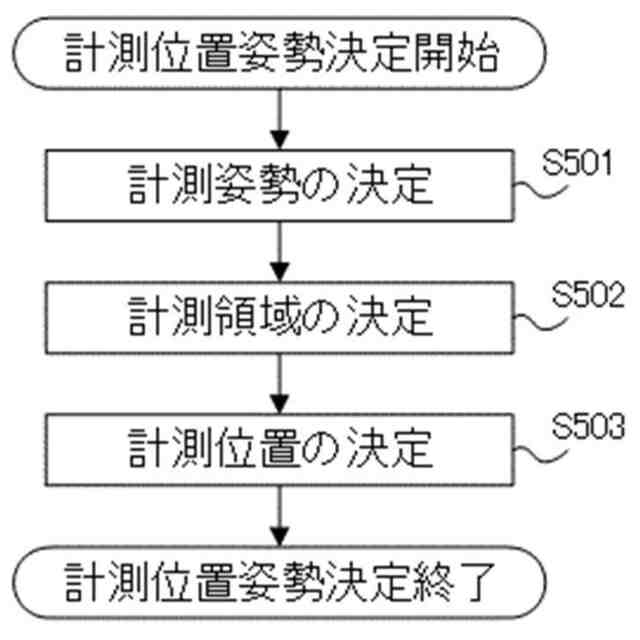
実施例1における位置姿勢決定処理を示すフローチャート。
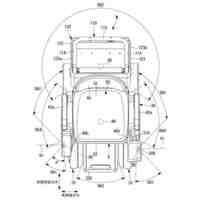
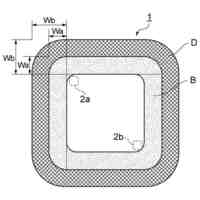
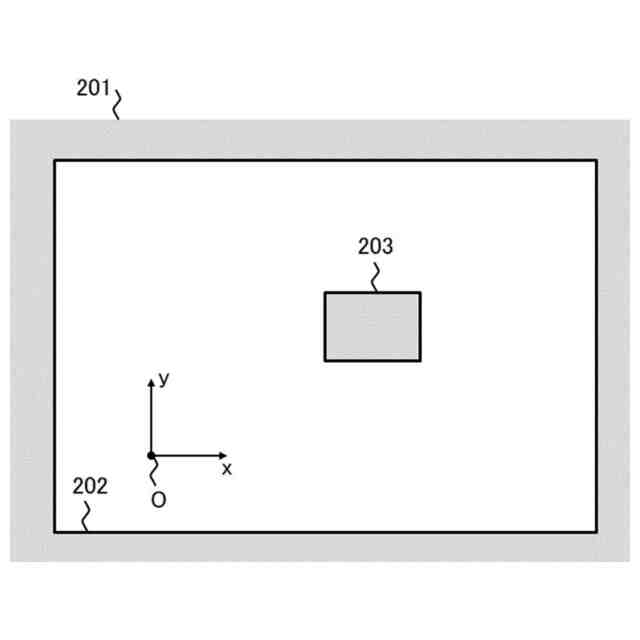
実施例1における第1の地図データの例を示す図。
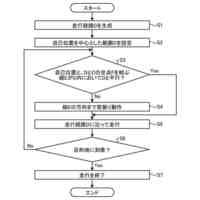
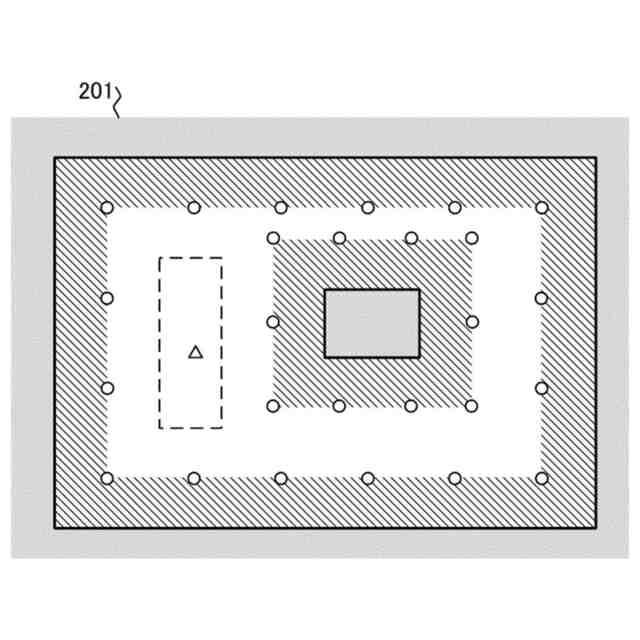
実施例1における計測位置の設定例を示す図。
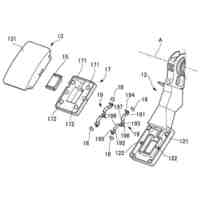
実施例2における情報処理装置の構成を示す図。
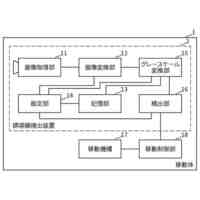
実施例2における情報処理装置の論理的構成を示すブロック図。
実施例2における情報処理を示すフローチャート。
【発明を実施するための形態】
【0009】
以下、本発明の実施例について図面を参照しながら説明する。
【実施例】
【0010】
本実施例の情報処理装置は、環境の形状を示す第1の地図データと、第2の地図データの作成に用いられるセンサの計測条件とを取得して、これらに基づいて第2の地図データの作成に適したセンサの位置と姿勢の組を決定する。以下の説明において、センサの位置と姿勢をまとめて「位置姿勢」といい、第2の地図データを作成するための計測を行うセンサの位置姿勢である計測位置と計測姿勢をまとめて「計測位置姿勢」という。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
今日
株式会社ダイヘン
移動体
5日前
ローム株式会社
半導体集積回路
15日前
三栄ハイテックス株式会社
基準電圧回路
18日前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社ダイフク
搬送設備
今日
株式会社ダイフク
搬送設備
1か月前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社ダイヘン
負荷時タップ切換器
5日前
株式会社ダイフク
物品搬送設備
14日前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社やまびこ
走行制御装置
2か月前
株式会社タブチ
減圧弁
1か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
11日前
株式会社計数技研
移動体、及びプログラム
1か月前
WHILL株式会社
電動モビリティ
1か月前
ローム株式会社
半導体装置
21日前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
25日前
株式会社デンソー
診断装置
2か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
25日前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
15日前
株式会社豊田自動織機
無人搬送車両
8日前
株式会社FUJI
工作機械
1日前
株式会社アイシン
自律移動体
1か月前
株式会社大林組
作業機械の自動運転制御システム
14日前
FCLコンポーネント株式会社
電源回路および検出装置
1か月前
株式会社東海理化電機製作所
ペダル装置
28日前
株式会社東海理化電機製作所
ペダル装置
28日前
三菱電機株式会社
状態推定装置及び移動体制御装置
1か月前
ファナック株式会社
機械プログラミング方法
1か月前
横河電機株式会社
電流出力装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ