TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025089601
公報種別
公開特許公報(A)
公開日
2025-06-13
出願番号
2023204303
出願日
2023-12-03
発明の名称
アクセル・ブレーキ操作装置
出願人
株式会社戸張空調
代理人
個人
主分類
G05G
1/30 20080401AFI20250606BHJP(制御;調整)
要約
【課題】背景技術として記載のアクセル・ブレーキ操作装置において、原位置に戻ろうとするブレーキ側ギアがアクセル側ギアに接触した場合でも、ブレーキ側ギアが原位置に戻りやすくする。
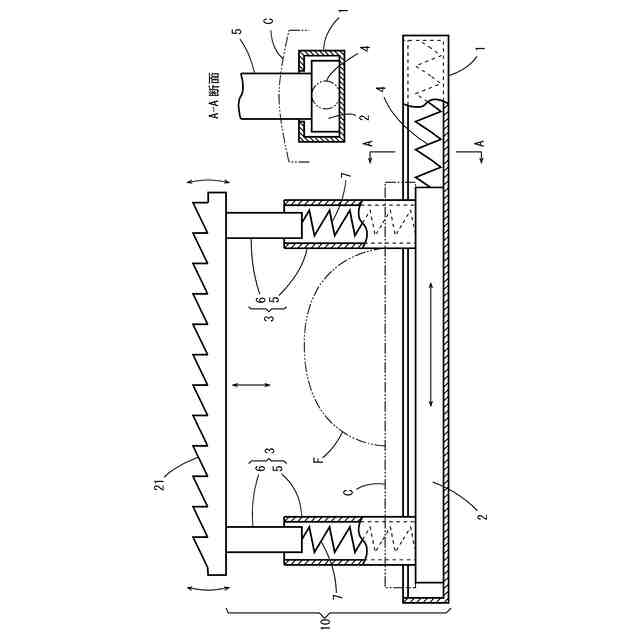
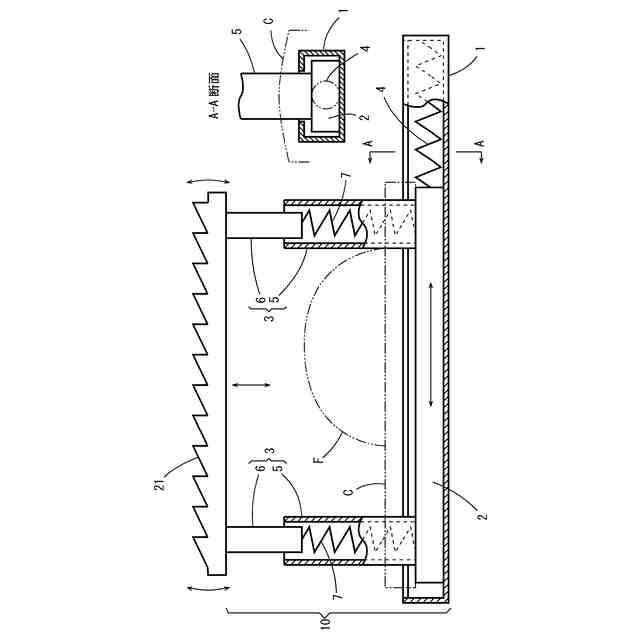
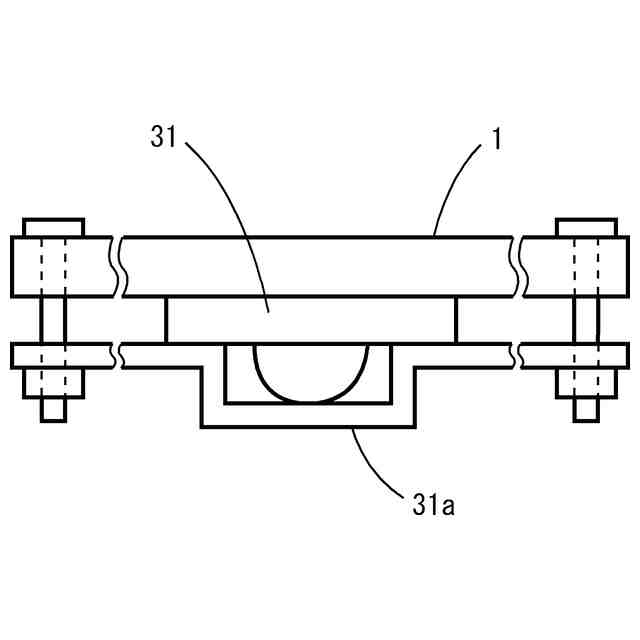
【解決手段】足操作機構10の下方への変位と共に一方の歯形と他方の歯形21との噛み合いが解除されアクセル操作機構の変位が原位置に復帰するように構成されたアクセル・ブレーキ操作装置において、解除の後再び一方の歯形と他方の歯形21とが噛み合うまでの過程で当該一方の歯形と他方の歯形21とが噛み合わずに接触したとき当該接触を受けて他方の歯形21を下方に一時的に変位させる逃がし機構3,3を備える。
【選択図】図1
特許請求の範囲
【請求項1】
上下左右に変位し下方への変位に応じてブレーキ踏み込み量を変化させる足操作機構と、
変位量に応じてアクセル開度を変化させるアクセル操作機構と、
前記足操作機構の左右への変位を前記アクセル操作機構の変位に連動させる連動機構とを備え、
前記連動機構は、前記アクセル操作機構に装備された一方の歯形と、前記足操作機構に装備された他方の歯形との解除可能な噛み合いで構成され、
前記足操作機構の下方への変位と共に前記一方の歯形と前記他方の歯形との噛み合いが解除され前記アクセル操作機構の変位が原位置に復帰するように構成し、
前記一方の歯形と前記他方の歯形とはそれぞれ噛み合う鋸状に形成し、前記アクセル操作機構が前記アクセル開度を開く方向に変位するとき前記噛み合いを維持しやすい向きに各歯形を配置した、アクセル・ブレーキ操作装置において、
前記解除の後再び前記一方の歯形と他方の歯形とが噛み合うまでの過程で当該一方の歯形と他方の歯形とが噛み合わずに接触したとき当該接触を受けて前記他方の歯形を下方に一時的に変位させる逃がし機構を備えた、アクセル・ブレーキ操作装置。
続きを表示(約 230 文字)
【請求項2】
前記逃がし機構は、前記足操作機構に装備した他方の歯形を下方に一時的に変位させる弾性機構を備えた、請求項1に記載のアクセル・ブレーキ装置。
【請求項3】
前記弾性機構は、左右方向に線状である前記他方の歯形の一端側と他端側とにそれぞれ独立に設けた、請求項2に記載のアクセル・ブレーキ装置。
【請求項4】
前記一端側と他端側の各弾性機構の間に足を置く空間を設けた、請求項3に記載のアクセル・ブレーキ装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、アクセル・ブレーキ操作装置に係り、特に、アクセルとブレーキの踏み間違いを防止する、車両用のアクセル・ブレーキ操作装置の改良に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
本願出願人は、車両用のアクセル・ブレーキ操作装置に関して特許出願を行い、特許を取得した(特許文献1)。このアクセル・ブレーキ操作装置の動作を図面を参照して説明する。
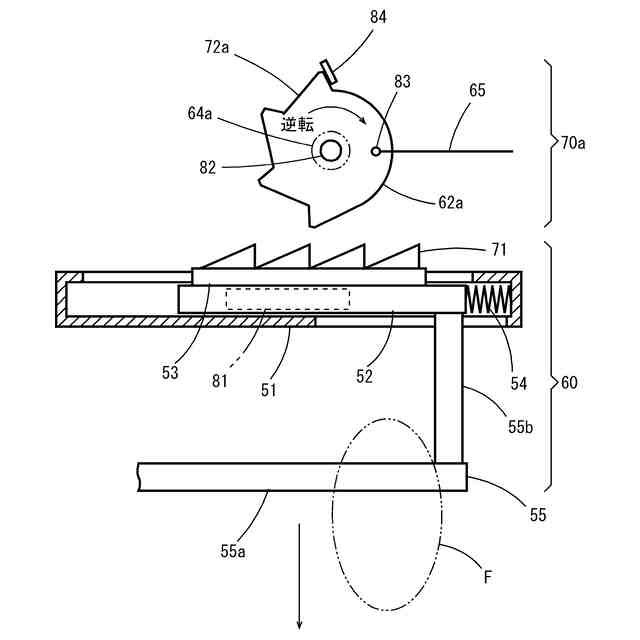
【0003】
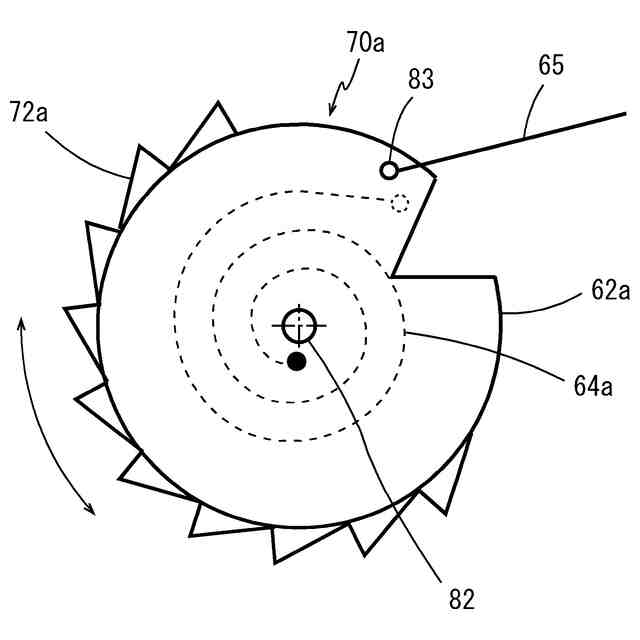
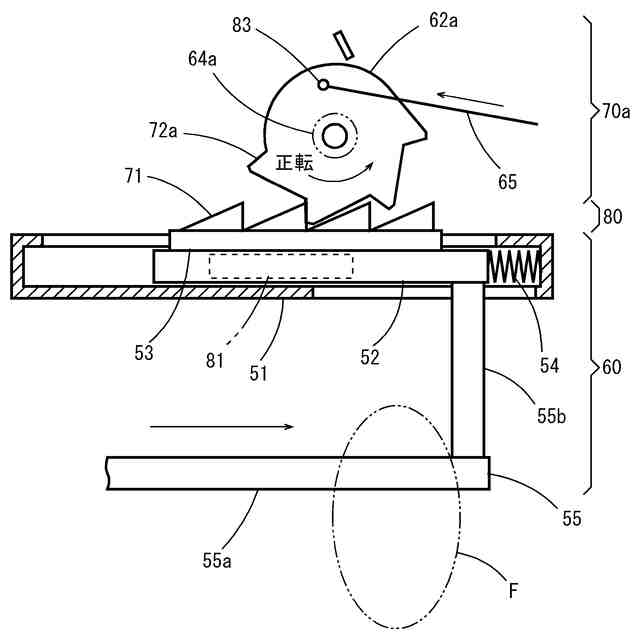
図5は、足操作機構60及びアクセル操作機構70aが、外力を受けず、共に原位置にある状態を示している。ブレーキ側ギア71は左端に配置され、アクセル側ギア72aは下端の歯がブレーキ側ギア71の右端の歯に対面している。アクセル側回転体62aは、アクセル側ギア72aの上端の歯がストッパ84に当接し静止している。このとき、ワイヤ固定部83は原位置にあり、アクセルワイヤ65はアクセル開度を0とする。
【0004】
図6に示すように、右足Fによりアーム部55bを右に押すアクセル操作を行うと、ブレーキ側ギア71が右に変位すると共に、これに当接して噛み合うアクセル側ギア72aが、アクセル側復帰スプリング64aに抗してアクセル側回転体62aを正転させる。この正転に伴いワイヤ固定部83が左に変位し、アクセルワイヤ65が引かれてアクセル開度が大きくなる。
【0005】
その後、図7に示すように、右足Fを下方に踏み込むブレーキ操作を行うと、足操作機構60が下方に下がり、ブレーキ側ギア71とアクセル側ギア72aとの当接が解除される。これにより、アクセル側回転体62aは、アクセル側復帰スプリング64aの付勢により逆転し、アクセル側ギア72aがストッパ84に当接して原位置に復帰する。ワイヤ固定部83も原位置に復帰し、アクセルワイヤ65が戻されてアクセル開度を直ちに0にする。
【0006】
このような機構により、アクセルは足Fを右に動かす操作となり、ブレーキは足Fを下に踏み込む操作となる。次に、足Fを足操作機構60から離すと、足操作機構60は、ペダルアーム81が上に戻ろうとする力と、ブレーキ側復帰スプリング54が左に伸びようとする力とにより、図5に示す原位置に復帰する。
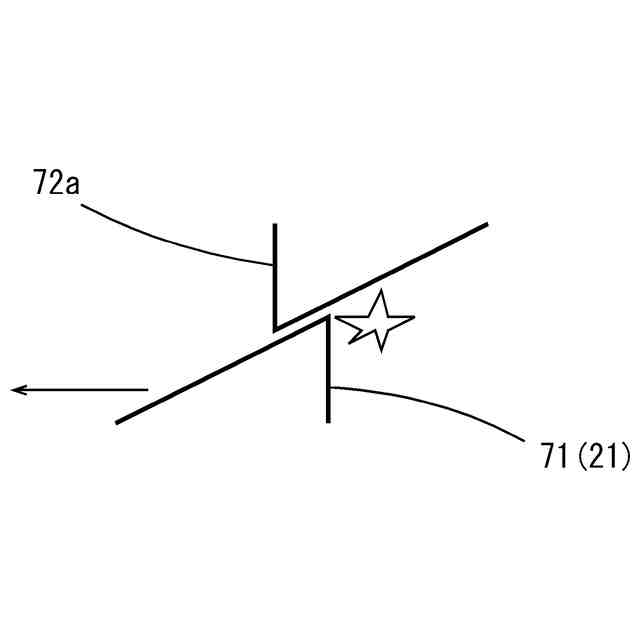
【0007】
しかしこの際、原位置に戻ろうとするブレーキ側ギア71が、途中で、先に原位置に復帰して固定されているアクセル側ギア72aに接触してしまう場合がある。図8に示すように、原位置に戻ろうとするブレーキ側ギア71の斜面と、固定されたアクセル側ギア72aの斜面とが接触し、ブレーキ側ギア71の戻りを妨げてしまう場合がある。
【先行技術文献】
【特許文献】
【0008】
特許第7248251号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
そこで、本発明は、原位置に戻ろうとするブレーキ側ギアがアクセル側ギアに接触した場合でも、ブレーキ側ギアが原位置に戻りやすくすることを課題とする。
【課題を解決するための手段】
【0010】
この課題を解決するため、本発明は、特許文献1に挙げたアクセル・ブレーキ操作装置の改良を提案する。特許文献1に挙げたアクセル・ブレーキ操作装置は、上下左右に変位し下方への変位に応じてブレーキ踏み込み量を変化させる足操作機構と、変位量に応じてアクセル開度を変化させるアクセル操作機構と、足操作機構の左右への変位を前記アクセル操作機構の変位に連動させる連動機構とを備える。このうち、連動機構は、アクセル操作機構に装備された一方の歯形と、足操作機構に装備された他方の歯形との解除可能な噛み合いで構成される。そして、足操作機構の下方への変位と共に一方の歯形と他方の歯形との噛み合いが解除されアクセル操作機構の変位が原位置に復帰するように構成する。一方の歯形と他方の歯形とはそれぞれ噛み合う鋸状に形成し、アクセル操作機構がアクセル開度を開く方向に変位するとき噛み合いを維持しやすい向きに各歯形を配置する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
基準電圧回路
3か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
17日前
ローム株式会社
半導体集積回路
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
6日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
エイブリック株式会社
ボルテージレギュレータ
3か月前
トヨタ自動車株式会社
生産管理システム
3日前
トヨタ自動車株式会社
ペダル機構
2か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
26日前
三菱電機株式会社
自己位置推定装置
2か月前
株式会社オプトン
制御プログラム生成装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
3か月前
株式会社鷺宮製作所
制御装置
1か月前
トヨタ自動車株式会社
減圧弁
今日
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社やまびこ
走行制御装置
3か月前
マーク ヘイリー
消防ロボット
10日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
アズビル株式会社
制御システムおよび制御方法
6日前
アズビル株式会社
制御システムおよび制御方法
6日前
株式会社テイエルブイ
減圧弁の制御装置
12日前
株式会社タブチ
減圧弁
3か月前
三菱電機株式会社
電源回路
26日前
WHILL株式会社
電動モビリティ
2か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
オムロン株式会社
安全装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ