TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025092944
公報種別
公開特許公報(A)
公開日
2025-06-23
出願番号
2023208372
出願日
2023-12-11
発明の名称
工作機械
出願人
株式会社FUJI
代理人
弁理士法人ネクスト
,
個人
,
個人
主分類
G05B
19/18 20060101AFI20250616BHJP(制御;調整)
要約
【課題】設定したいロボットポイントを見付け易くできる工作機械を提供すること。
【解決手段】本開示の工作機械は、ユーザインタフェースと、ワークを搬送するロボットと、ロボットの移動を制御する制御装置と、を備える。制御装置は、ロボットが移動する位置と座標を関連付けたロボットポイントについて、ロボットポイントの座標に基づいてロボットを移動させる移動処理と、ユーザインタフェースに対する操作入力に基づいてロボットを制御し、ロボットの現在位置を変更する現在位置変更処理と、ロボットポイントの一覧をユーザインタフェースに表示する場合に、表示する複数のロボットポイントのうち、ロボットの現在位置に近いロボットポイントを、他のロボットポイントとは異なる表示にする表示処理と、を実行する。
【選択図】図5
特許請求の範囲
【請求項1】
ユーザインタフェースと、
ワークを搬送するロボットと、
前記ロボットの移動を制御する制御装置と、
を備え、
前記制御装置は、
前記ロボットが移動する位置と座標を関連付けたロボットポイントについて、前記ロボットポイントの前記座標に基づいて前記ロボットを移動させる移動処理と、
前記ユーザインタフェースに対する操作入力に基づいて前記ロボットを制御し、前記ロボットの現在位置を変更する現在位置変更処理と、
前記ロボットポイントの一覧を前記ユーザインタフェースに表示する場合に、表示する複数の前記ロボットポイントのうち、前記ロボットの現在位置に近い前記ロボットポイントを、他の前記ロボットポイントとは異なる表示にする表示処理と、
を実行する、工作機械。
続きを表示(約 1,500 文字)
【請求項2】
前記制御装置は、
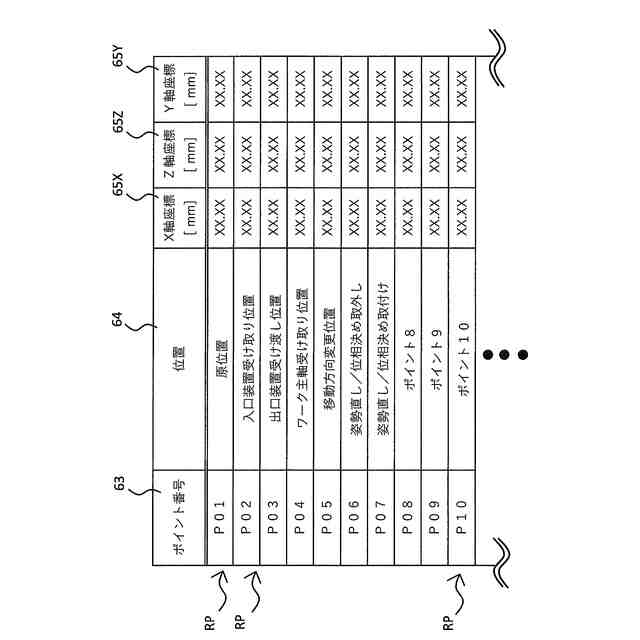
前記移動処理において、ポイントデータに登録された前記ロボットポイントの前記座標に基づいて前記ロボットを移動させ、
前記表示処理において、前記ポイントデータに登録された複数の前記ロボットポイントを一覧にして表示し、前記ポイントデータに登録された複数の前記ロボットポイントを複数のページに分けて表示し、且つ、前記ユーザインタフェースの近接ポイントボタンが操作されたことに基づいて、前記ロボットの現在位置に近い前記ロボットポイントが表示されるページを、前記ユーザインタフェースに表示する、請求項1に記載の工作機械。
【請求項3】
前記制御装置は、
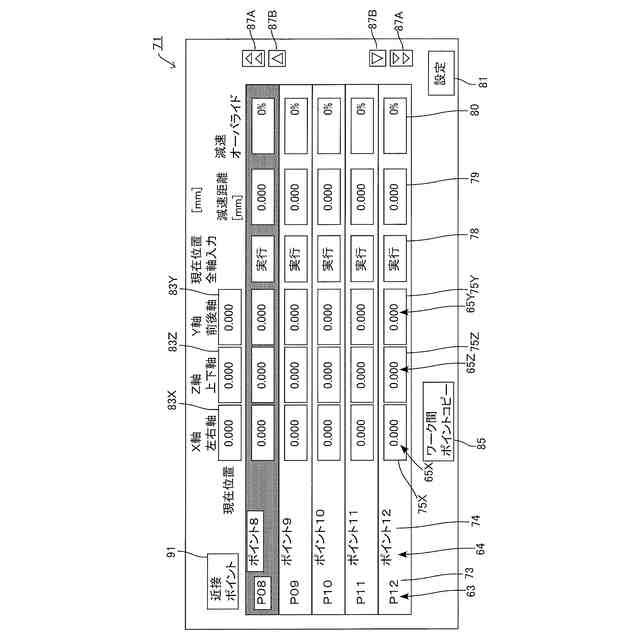
前記近接ポイントボタンが操作されたことに基づいて、前記ロボットの現在位置に近い前記ロボットポイントが表示されるページを、前記ユーザインタフェースに表示し、前記ロボットの現在位置に近い前記ロボットポイントを一覧の一番上に表示し、且つ、前記ロボットの現在位置に近い前記ロボットポイントを、他の前記ロボットポイントとは異なる色で表示する、請求項2に記載の工作機械。
【請求項4】
前記制御装置は、
前記近接ポイントボタンが操作されたことに基づいて、前記ロボットの現在位置に最も近い前記ロボットポイントが表示されるページを、前記ユーザインタフェースに表示した後、再度、前記近接ポイントボタンが操作された場合、前記ロボットの現在位置に最も近い前記ロボットポイントの次に現在位置から近い前記ロボットポイントが表示されるページを、前記ユーザインタフェースに表示する、請求項2に記載の工作機械。
【請求項5】
前記制御装置は、
前記表示処理において、複数の前記ロボットポイントのうち、前記ロボットの現在位置に最も近い前記ロボットポイントを、他の前記ロボットポイントとは異なる表示にし、
前記現在位置変更処理により前記ロボットの現在位置が変更され前記ロボットの現在位置に最も近い前記ロボットポイントが変更された場合、変更後の前記ロボットの現在位置に最も近い前記ロボットポイントを、他の前記ロボットポイントとは異なる表示にする、請求項1又は請求項2に記載の工作機械。
【請求項6】
前記制御装置は、
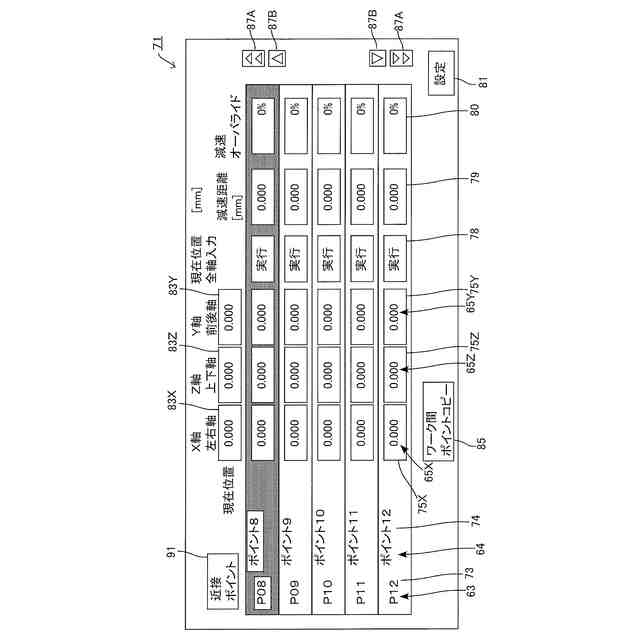
前記表示処理において、一覧に表示する複数の前記ロボットポイントの各々について、前記ロボットポイントの識別情報と、前記ロボットポイントの座標を入力する座標入力部と、現在位置入力ボタンとを関連付けて表示し、
複数の前記現在位置入力ボタンのうち、任意の前記現在位置入力ボタンが操作された場合、操作された前記現在位置入力ボタンと関連付けられた前記座標入力部に、前記ロボットの現在位置の座標を入力し、
前記ロボットの現在位置に近い前記ロボットポイントの前記識別情報、前記座標入力部、及び前記現在位置入力ボタンを、他の前記ロボットポイントの前記識別情報、前記座標入力部、及び前記現在位置入力ボタンとは異なる表示にする、請求項1又は請求項2に記載の工作機械。
【請求項7】
前記制御装置は、
前記ロボットポイントの一覧を表示する操作を前記ユーザインタフェースに対して受け付けた場合に、前記ロボットの現在位置に近い前記ロボットポイントを一覧の中に表示し、且つ、前記ロボットの現在位置に近い前記ロボットポイントを、他の前記ロボットポイントとは異なる表示にする、請求項1又は請求項2に記載の工作機械。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットの移動に係る座標を設定する技術に関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
下記特許文献1には、オートローダ装置を制御するローダ用プログラムを作成する技術について記載されている。特許文献1の対話入力式ローダ制御装置は、NC装置の本機とオートローダ装置の関係位置データをCRTの画面に表示し、この表示を行いながら質問に答えさせる形式で、オートローダが移動するポイントデータを受け付け、受け付けたポイントデータに基づいてローダプログラムを作成している。
【先行技術文献】
【特許文献】
【0003】
実開平06-071043号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
オートローダ装置などのロボットは、複数の装置間でワークの受け渡しを実行する。工作機械には、ワーク主軸装置、タレット装置、工具主軸装置、反転装置や検測装置など、工作機械に要求される機能や性能に応じて様々な装置が設置される。ロボットの移動先をロボットポイントとして登録する場合、ロボットポイントの登録数や登録順は、工作機械の構成に応じて異なってくる。このため、ユーザが、ロボットを移動させて移動先の座標を、任意のロボットポイントの座標として設定したい場合に、設定したいロボットポイントを、登録されたロボットポイントの中から探す作業が発生する問題がある。
【0005】
本開示は、上記の課題に鑑みてなされたものであり、設定したいロボットポイントを見付け易くできる工作機械を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本明細書は、ユーザインタフェースと、ワークを搬送するロボットと、前記ロボットの移動を制御する制御装置と、を備え、前記制御装置は、前記ロボットが移動する位置と座標を関連付けたロボットポイントについて、前記ロボットポイントの前記座標に基づいて前記ロボットを移動させる移動処理と、前記ユーザインタフェースに対する操作入力に基づいて前記ロボットを制御し、前記ロボットの現在位置を変更する現在位置変更処理と、前記ロボットポイントの一覧を前記ユーザインタフェースに表示する場合に、表示する複数の前記ロボットポイントのうち、前記ロボットの現在位置に近い前記ロボットポイントを、他の前記ロボットポイントとは異なる表示にする表示処理と、を実行する、工作機械を開示する。
【発明の効果】
【0007】
本開示の工作機械によれば、ロボットポイントの一覧を表示した場合に、ロボットの現在位置に近いロボットポイントを、他のロボットポイントとは異なる表示にする。このため、ユーザは、ロボットポイントの表示態様の違いを確認することで、ロボットの現在位置に近いロボットポイントを比較的容易に見つけ出すことができる。登録したい位置にロボットを移動させた後に一覧を確認することで、所望のロボットポイントを見つけ出し座標の登録を円滑に行うことができる。
【図面の簡単な説明】
【0008】
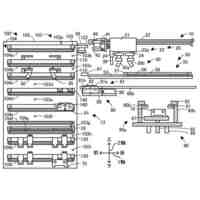
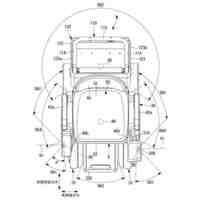
本実施例に係わる工作機械の正面図。
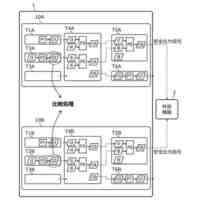
工作機械のブロック図。
ポイントデータに登録されたデータを示す図。
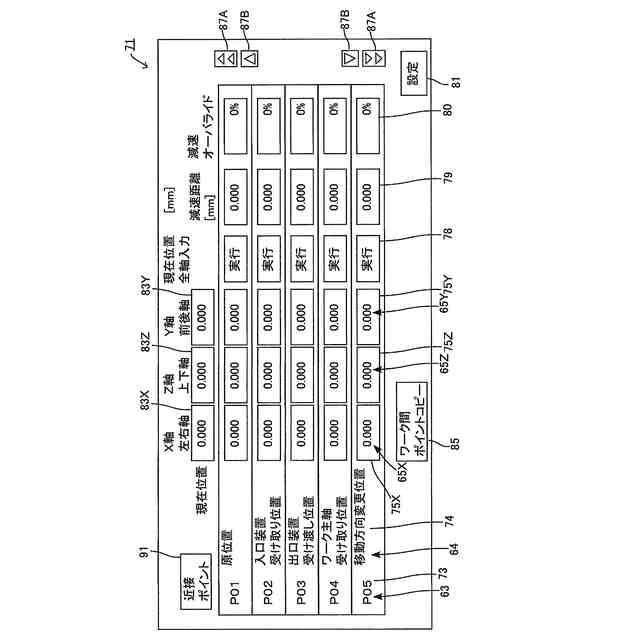
ロボットポイントを設定する設定画面を示す図。
強調されたロボットポイントを表示した設定画面を示す図。
【発明を実施するための形態】
【0009】
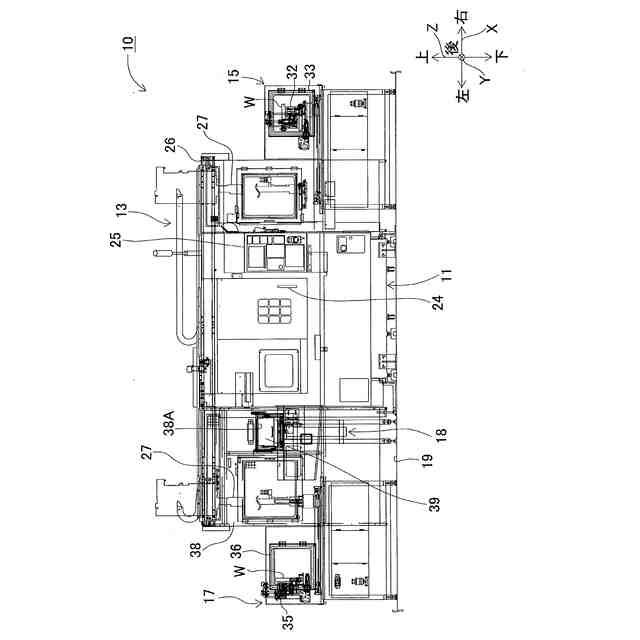
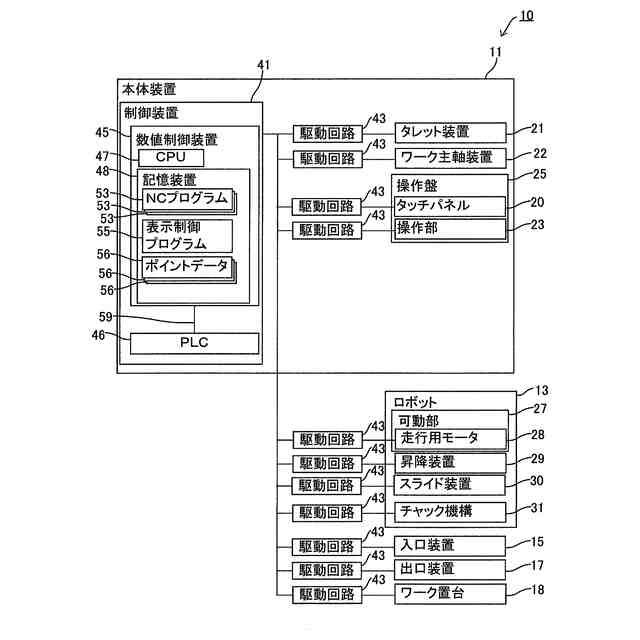
以下、本開示の工作機械を具体化した一実施例について、図を参照しつつ詳しく説明する。図1は、本実施例に係る工作機械10の正面図である。図2は、工作機械10のブロック図である。図1及び図2に示すように、本実施例の工作機械10は、例えば、本体装置11、ロボット13の他に、入口装置15、出口装置17、ワーク置台(以下、「置台」という)18等のオプション装置を装着可能となっている。また、図1は、各装置内に設けられた装置や機器(レール台26など)の一部を透過的に図示している。また、以下の説明では、図1に示すように、工作機械10を正面から見た方向を基準として、機械幅方向であって装置の設置面19に水平な左右方向をX軸方向、装置の設置面19に平行で左右方向に垂直な前後方向をY軸方向、X軸方向及びY軸方向に垂直な上下方向をZ軸方向と称して説明する。
【0010】
工作機械10は、X軸方向において右から順番に、ワークWを搬入する入口装置15、本体装置11、加工したワークWを確認するためにワークWを配置する置台18、ワークWを排出する出口装置17の順に配置されている。本体装置11は、例えば、タレット装置21(図2参照)やワーク主軸装置22(図2参照)を装置内に備え、ワーク主軸装置22にチャックしたワークWを、タレット装置21の切削工具(バイトや回転工具など)で加工する。本体装置11の前面には、スライド扉24、操作盤25が設けられている。スライド扉24の後方には、タレット装置21やワーク主軸装置22を配置した加工スペースが設けられている。操作盤25は、例えば、タッチパネル20(図2参照)や操作部23(図2参照)等を備え、工作機械10に関する情報の表示や動作指示の受け付けなどを実行する。操作部23としては、切り替えスイッチ、ボタン、スライドスイッチ、ロータリスイッチなど様々な操作機器を採用できる。特に、本実施例では、工作機械10は、タッチパネル20によって、後述するロボットポイントの設定画面において、ロボットポイントの座標を受け付ける(図4参照)。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
最適化装置および最適化方法
4日前
株式会社FUJI
廃テープ搬送装置および実装装置
12日前
株式会社FUJI
印刷システム
16日前
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
23日前
個人
作業車両自動化システム
4日前
ローム株式会社
半導体集積回路
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
12日前
株式会社ダイフク
搬送設備
2日前
三栄ハイテックス株式会社
基準電圧回路
2か月前
トヨタ自動車株式会社
ペダル機構
2か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
9日前
トヨタ自動車株式会社
減圧弁
6日前
株式会社鷺宮製作所
制御装置
1か月前
株式会社オプトン
制御プログラム生成装置
1か月前
三菱電機株式会社
自己位置推定装置
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
マーク ヘイリー
消防ロボット
16日前
株式会社テイエルブイ
減圧弁の制御装置
18日前
アズビル株式会社
制御システムおよび制御方法
12日前
株式会社タブチ
減圧弁
3か月前
アズビル株式会社
制御システムおよび制御方法
12日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
WHILL株式会社
電動モビリティ
2か月前
オムロン株式会社
安全装置
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
株式会社計数技研
移動体、及びプログラム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ