TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025108160
公報種別
公開特許公報(A)
公開日
2025-07-23
出願番号
2024001889
出願日
2024-01-10
発明の名称
搬送ロボットの運用方法および搬送システム
出願人
株式会社FUJI
代理人
弁理士法人アイテック国際特許事務所
主分類
G05D
1/622 20240101AFI20250715BHJP(制御;調整)
要約
【課題】生産効率の低下を抑制する。
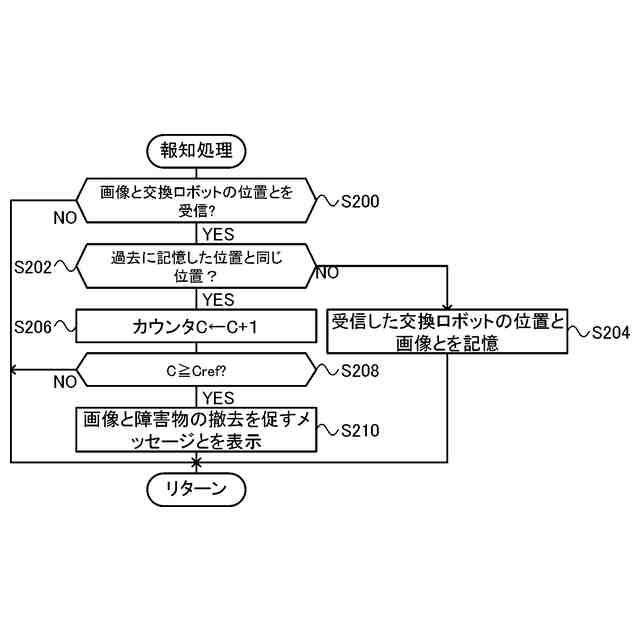
【解決手段】搬送ロボットの運用方法は、予め定められた走行ルートを走行して生産システムに必要な部材を搬送すると共に、走行中に周囲の障害物を検知すると制限走行を行なう搬送ロボットの運用方法であって、搬送ロボットが障害物を検知したときの搬送ロボットの位置を記憶し、搬送ロボットが同じ位置または所定の範囲内で障害物を複数回検知した場合に障害物を取り除くことを促すための報知を行なう。
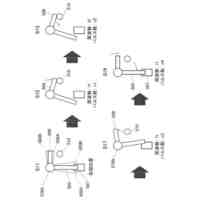
【選択図】図7
特許請求の範囲
【請求項1】
予め定められた走行ルートを走行して生産システムに必要な部材を搬送すると共に、走行中に周囲の障害物を検知すると制限走行を行なう搬送ロボットの運用方法であって、
前記搬送ロボットが障害物を検知したときの該搬送ロボットの位置を記憶し、
前記搬送ロボットが同じ位置または所定の範囲内で障害物を複数回検知した場合に当該障害物を取り除くことを促すための報知を行なう、
搬送ロボットの運用方法。
続きを表示(約 740 文字)
【請求項2】
請求項1に記載の搬送ロボットの運用方法であって、
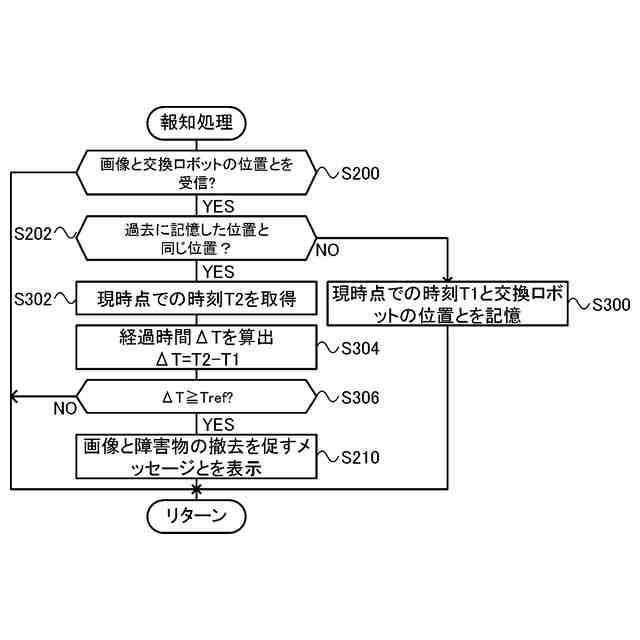
前記搬送ロボットが前記同じ位置または前記所定の範囲内で、所定時間以上の時間を隔てて障害物を複数回検知した場合に、前記報知を行なう、
搬送ロボットの運用方法。
【請求項3】
請求項1または2に記載の搬送ロボットの運用方法であって、
前記搬送ロボットが予め設定された非報知範囲内で障害物を検知しても、前記報知を行なわない、
搬送ロボットの運用方法。
【請求項4】
請求項1または2に記載の搬送ロボットの運用方法であって、
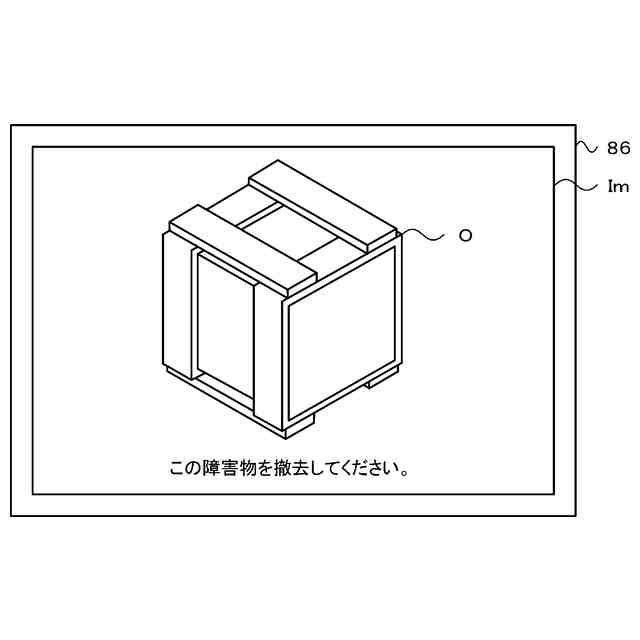
前記搬送ロボットに周囲の画像を撮像可能なカメラを設け、
前記搬送ロボットが障害物を検出した場合に、前記カメラで撮像した前記障害物の画像を表示する、
搬送ロボットの運用方法。
【請求項5】
請求項1または2に記載の搬送ロボットの運用方法であって
前記制限走行は、減速走行である、
搬送ロボットの運用方法。
【請求項6】
周囲の障害物を検知可能なセンサが設けられ、予め定められた走行ルートを走行して生産システムに必要な部材を搬送すると共に、走行中に前記センサによって周囲の障害物が検知されると制限走行を行なう搬送ロボットと、
前記走行ルートに対する前記搬送ロボットの位置を取得する位置取得部と、
前記センサにより障害物が検知されたときの該搬送ロボットの位置を記憶する記憶部と、
前記センサにより同じ位置または所定の範囲内で障害物が複数回検知された場合に当該障害物を取り除くことを促すための報知を行なう報知部と、
を備える搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、搬送ロボットの運用方法および搬送システムについて開示する。
続きを表示(約 1,500 文字)
【背景技術】
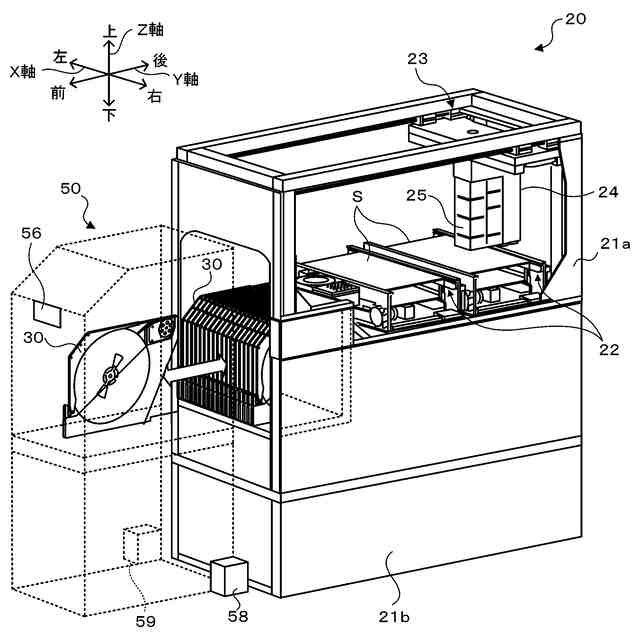
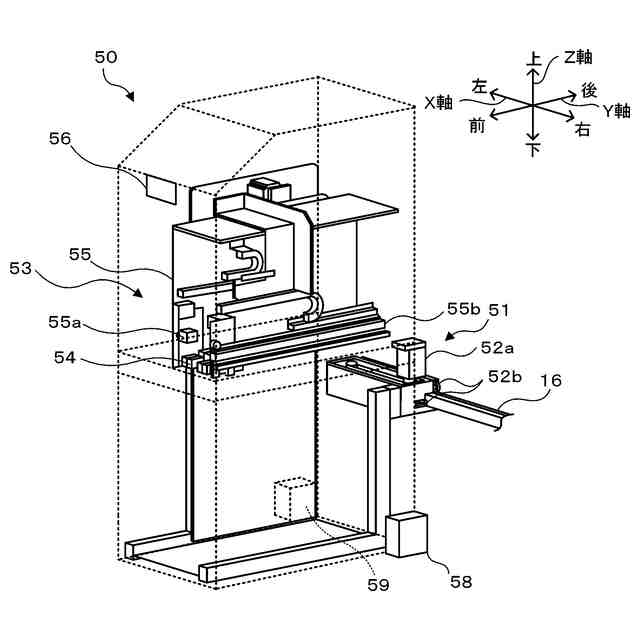
【0002】
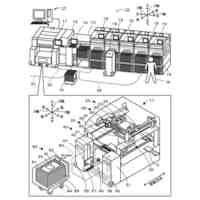
従来、複数の部品実装機と、各部品実装機との間でフィーダの交換を行なう交換ロボットと、管理装置とを備える生産システムが提案されている(例えば、特許文献1)。この生産システムにおいて、交換ロボットは、走行ルート上で障害物を検知すると停止する。また、管理装置は、交換ロボットが走行を停止してからの経過時間を計測すると共に経過時間に基づいて残り時間を算出する。残り時間は、交換ロボットが予定時刻までにフィーダの交換作業を完了させるために移動を再開しなければならない時刻までの時間である。また、管理装置は、残り時間が所定時間よりも短い場合に、残り時間に応じた態様の報知をする。
【先行技術文献】
【特許文献】
【0003】
特開2021-73730号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
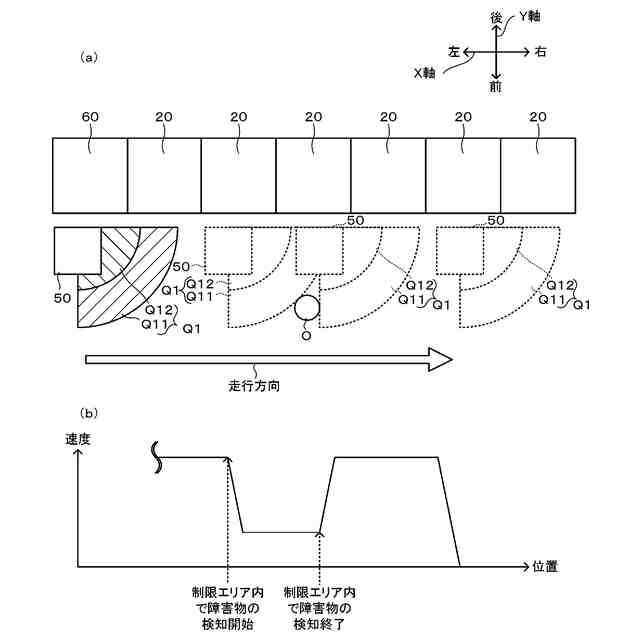
ところで、生産システムに適用される交換ロボットには、障害物を検知すると制限走行をするタイプのものもある。そのようなタイプ交換ロボットは、障害物を検知してもフィーダの交換作業を行なうことができるものの、繰り返し障害物を検知して制限走行を行なうことによってフィーダの交換に時間を要し、生産システム全体での生産効率が低下するおそれがある。
【0005】
本開示は、生産効率の低下を抑制することを主目的とする。
【課題を解決するための手段】
【0006】
本開示は、上述の主目的を達成するために以下の手段を採った。
【0007】
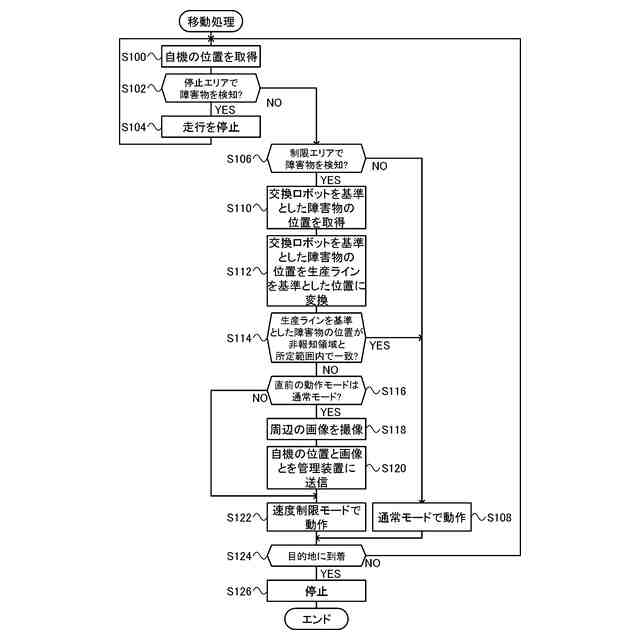
本開示の搬送ロボットの運用方法は、
予め定められた走行ルートを走行して生産システムに必要な部材を搬送すると共に、走行中に周囲の障害物を検知すると制限走行を行なう搬送ロボットの運用方法であって、
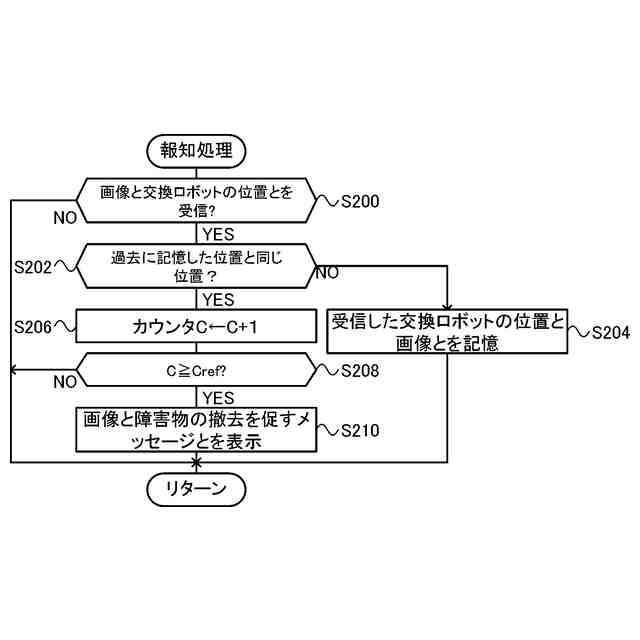
前記搬送ロボットが障害物を検知したときの該搬送ロボットの位置を記憶し、
前記搬送ロボットが同じ位置または所定の範囲内で障害物を複数回検知した場合に当該障害物を取り除くことを促すための報知を行なう、
ことを要旨とする。
【0008】
この搬送ロボットの運用方法によれば、搬送ロボットが同じ位置または所定の範囲内で障害物を複数回検知した場合に障害物を取り除くことを促すための報知を行なう。制限走行の原因となる障害物の撤去を促すことで、生産効率の低下を抑制することができる。また、同じ位置または所定範囲内で障害物が複数回検知されなければ報知を行なわないため、作業者の検知など一時的な検知に対して報知しないようにすることができる。
【0009】
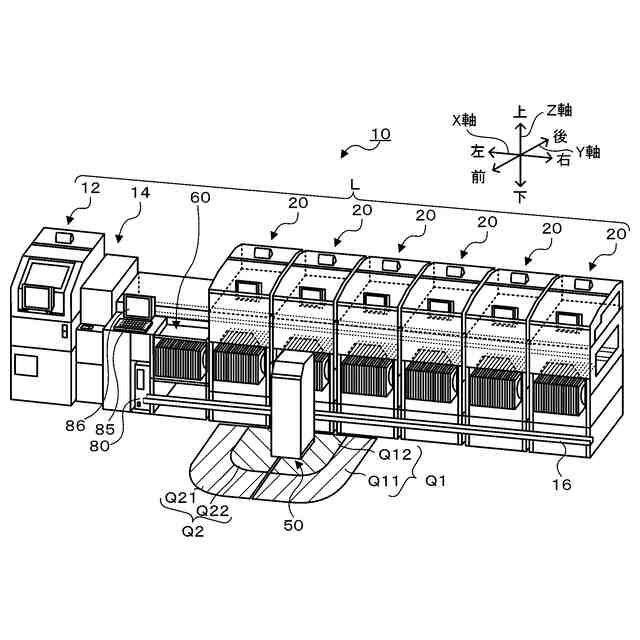
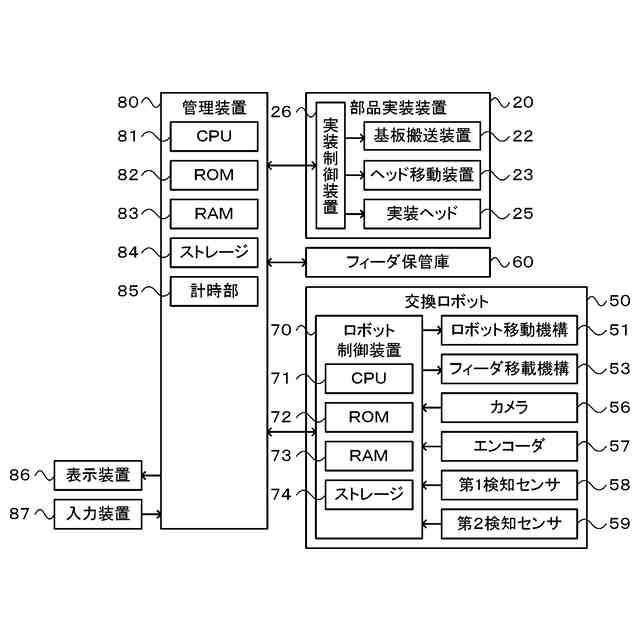
本開示の搬送システムは、
周囲の障害物を検知可能なセンサが設けられ、予め定められた走行ルートを走行して生産システムに必要な部材を搬送すると共に、走行中に前記センサによって周囲の障害物が検知されると制限走行を行なう搬送ロボットと、
前記走行ルートに対する前記搬送ロボットの位置を取得する位置取得部と、
前記センサにより障害物が検知されたときの該搬送ロボットの位置を記憶する記憶部と、
前記センサにより同じ位置または所定の範囲内で障害物が複数回検知された場合に当該障害物を取り除くことを促すための報知を行なう報知部と、
を備えることを要旨とする。
【0010】
この搬送システムは、本開示の搬送ロボットの運用方法と同様の効果を奏する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社FUJI
テープフィーダ
6日前
株式会社FUJI
部品実装機及びテープ回収方法。
今日
株式会社FUJI
作業装置
7日前
株式会社FUJI
モータ制御装置、装着ヘッド及びモータ制御装置の制御方法
13日前
株式会社FUJI
異物除去方法
5日前
株式会社FUJI
部品実装機、部品実装機のためのコンピュータプログラム及び部品実装機の制御方法
4日前
株式会社FUJI
実装方法及び印刷関連部材交換方法
5日前
株式会社FUJI
部品装着システムおよび情報管理方法
25日前
他の特許を見る
 特許ウォッチ
特許ウォッチ