TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025113114
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024076452
出願日
2024-05-09
発明の名称
魚型バイオミメティクス装置
出願人
先鋒材料科技股ふん有限公司
,
PIONEER MATERIAL PRECISION TECH CO., LTD.
代理人
個人
,
個人
,
個人
主分類
B63C
11/52 20060101AFI20250725BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
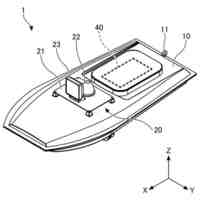
【課題】魚類の遊泳運動を模倣できる魚型バイオミメティクス装置の提供。
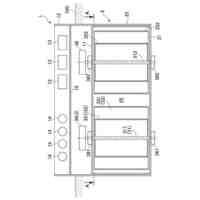
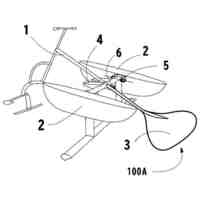
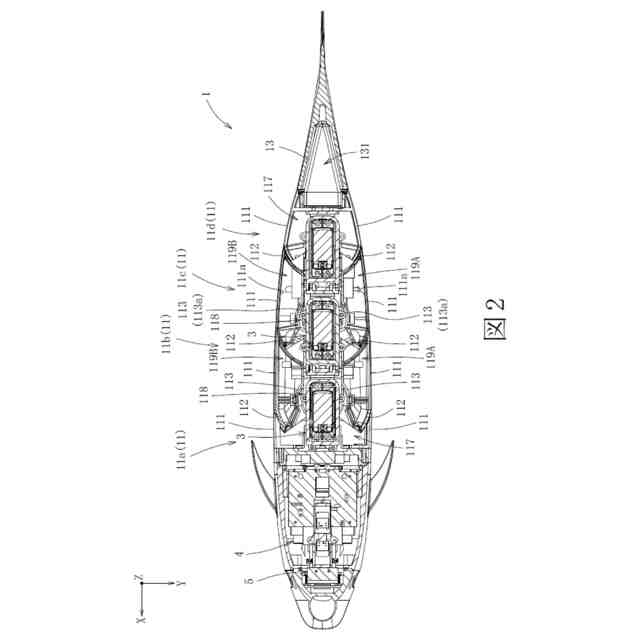
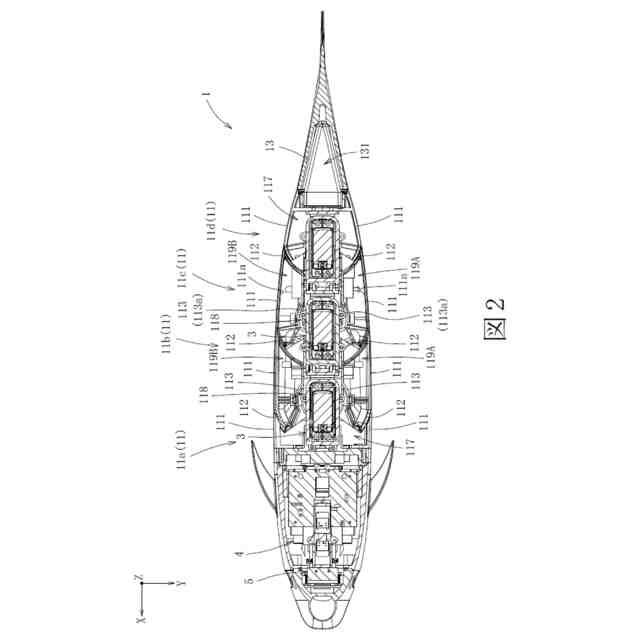
【解決手段】前後方向Xにおいて互いに隣接するように配列される複数の筐体部材11を有する魚型の筐体ユニット1と、互いに隣接するいずれか2つの筐体部材11の間に配置される複数の回転手段3と、を備え、各回転手段3がそれぞれ有する前方側の筐体部材11に配置される各第1のモータモジュールが後方側の筐体部材11に配置される第1の回転部材を回転駆動すると、前記前方側の筐体部材11と前記後方側の筐体部材11との相対揺動を駆動して魚類の遊泳運動を模倣する。
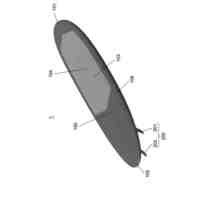
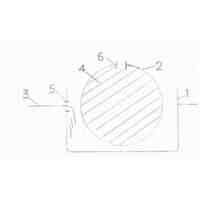
【選択図】図2
特許請求の範囲
【請求項1】
水中環境において前方へ移動可能な魚型バイオミメティクス装置であって、
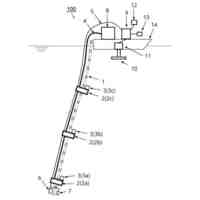
前後方向において互いに隣接するように配列される複数の筐体部材を有する魚型の筐体ユニットと、
互いに隣接するいずれか2つの前記筐体部材の間に配置され、且つ、いずれもこの2つの前記筐体部材における前方側にある1つの前記筐体部材に取り付けられる第1のモータモジュールと、この2つの前記筐体部材における後方側にある1つの前記筐体部材に取り付けられると共に、上下方向に延伸する第1の軸線を回転軸として回転可能に前記第1のモータモジュールに接続される第1の回転部材とを有する複数の回転手段と、を備え、
各前記回転手段がそれぞれ有する各前記第1のモータモジュールは、それぞれ個別に制御を受けて対応する前記第1の回転部材に対して前記第1の軸線を回転軸として所定角度の回転運動を行うことにより、前記前方側にある前記筐体部材の前記後方側にある前記筐体部材に対する相対回転を駆動する、魚型バイオミメティクス装置。
続きを表示(約 2,400 文字)
【請求項2】
前記第1のモータモジュールの前記第1の回転部材に対する時計回りもしくは反時計回りの回転駆動によって、前記後方側にある前記筐体部材を前記前方側にある前記筐体部材に対して左右に揺動させるように構成されることで、すべての前記第1のモータモジュールの協働により前記魚型バイオミメティクス装置全体の水中環境における前方へ移動する推進力を生成する、請求項1に記載の魚型バイオミメティクス装置。
【請求項3】
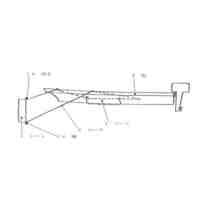
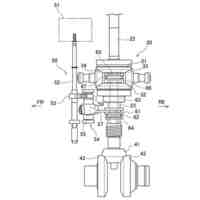
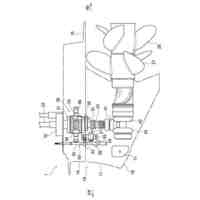
各前記筐体部材において最も前側に配置される筐体部材内に配置される第2のモータモジュールと、前記前後方向に延伸する第2の軸線で回転可能に前記第2のモータモジュールに接続される第2の回転部材と、前記第2のモータモジュールに対して前記前後方向に沿って移動可能に配置される重り部材と、を有する重心移動メカニズムを更に備え、
前記第2の回転部材は、シリンダー状に形成されると共に、外表面に前記第2の軸線を囲んでらせん状に延伸するらせん溝が形成されているシリンダー状カムを有しており、
前記重り部材は、前記シリンダー状カムに形成される前記らせん溝に沿って相対移動可能に前記らせん溝に係合するガイドブロックを有し、
前記重心移動メカニズムは、前記第2のモータモジュールが制御を受けて前記第2の回転部材の前記シリンダー状カムを前記第2の軸線を回転軸として回転駆動すると、前記ガイドブロックを前記らせん溝に沿って移動させることにより、前記重り部材を前記前後方向に沿って前記第2のモータモジュールに対して相対移動させることで前記魚型バイオミメティクス装置全体の重心を移動させるように構成されている、請求項2に記載の魚型バイオミメティクス装置。
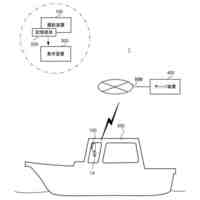
【請求項4】
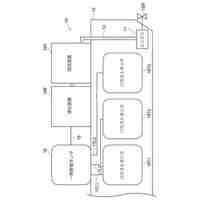
制御モジュールとセンサモジュールとを更に備え、
前記制御モジュールは各前記筐体部材において最も前側に配置される筐体部材内に配置されると共に、各前記第1のモータモジュール及び前記第2のモータモジュールに電気的に接続することで各前記第1のモータモジュール及び前記第2のモータモジュールをそれぞれ個別に制御可能に構成されており、
前記センサモジュールは前記制御モジュールに電気的に接続すると共に最も前側に配置される前記筐体部材内に配置され、且つ、水中環境における周囲の物体を感知できるセンサー素子を少なくとも1つ有することにより、前記センサー素子が周囲の物体を感知すると前記制御モジュールに対応の感知信号を送信し、そして前記制御モジュールが前記感知信号を受信すると、少なくとも1つの前記第1のモータモジュール及び前記第2のモータモジュールを制御して前記魚型バイオミメティクス装置全体の前進方向を変更させるように構成されている、請求項3に記載の魚型バイオミメティクス装置。
【請求項5】
前記センサモジュールは、前記最も前側に配置される筐体部材における前側と左側と右側にそれぞれ配置され、且つ、前記制御モジュールにそれぞれ電気的に接続する3つの前記センサー素子を有することにより、いずれか1つの前記センサー素子が周囲の物体を感知すると前記制御モジュールに対応の感知信号を送信するように構成されている、請求項4に記載の魚型バイオミメティクス装置。
【請求項6】
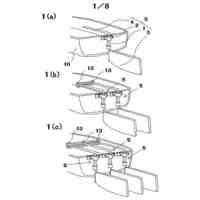
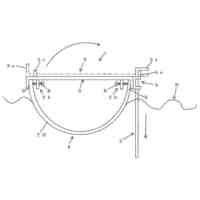
各前記筐体部材は、いずれも1つの前記回転手段の左右に配置されると共に互いに係合し合って対応する1つの前記回転手段の一部を収容する収容スロットを画成する左右1つずつの半筐体を有し、互いに隣接する2つの前記筐体部材における後方側にある1つの前記筐体部材が有する2つの前記半筐体のそれぞれの前端部には、前方へ延伸して前方側にある前記筐体部材内に挿入すると共に、2つの前記半筐体の間にある前記収容スロット側へ曲がるように延伸することで、互いに隣接する2つの前記筐体部材における後方側にある1つの前記筐体部材が有する前記半筐体と前方側にある前記筐体部材が有する前記半筐体との間にある隙間を遮蔽する湾曲フランジが1つずつ形成される、請求項1に記載の魚型バイオミメティクス装置。
【請求項7】
少なくとも1つの前記筐体部材は前記収容スロット内に収容されると共に2つの前記半筐体にそれぞれ接続される1対の内側仕切り壁を有し、前記1対の内側仕切り壁はそれぞれが接続される前記半筐体及び前記湾曲フランジと共に、前記収容スロットを中央スロット部と、前記中央スロット部の両側にそれぞれあって水中環境から遮断される左側空気室と右側空気室とに仕切るように構成される、請求項6に記載の魚型バイオミメティクス装置。
【請求項8】
各前記筐体部材が有する各前記内側仕切り壁にそれぞれ左右方向に延伸する通孔が少なくとも1つ形成され、各前記半筐体の対応する前記内側仕切り壁に隣接する内側には前記内側仕切り壁に形成される前記通孔に対応するねじ孔が形成されており、
また、各前記筐体部材は前記通孔を挿通して前記通孔に対応する前記ねじ孔に取り外し可能にねじ込まれるねじと、前記ねじに取り付けられる水密ワッシャーとを更に有し、これにより前記内側仕切り壁は対応する前記半筐体に取り外し可能に固定される、請求項7に記載の魚型バイオミメティクス装置。
【請求項9】
少なくとも1つの前記筐体部材は、前記内側仕切り壁の周縁において対応する前記半筐体に面するように前記内側仕切り壁の前記半筐体及び前記湾曲フランジとの間にある隙間を水密に封止する1対の水密リングを有する、請求項8に記載の魚型バイオミメティクス装置。
【請求項10】
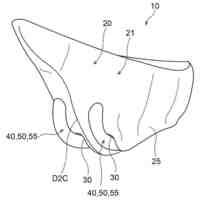
前記魚型の筐体ユニットが有する複数の前記筐体部材における最も後側に配置される1つの前記筐体部材には、尾ヒレ空間を囲むように中空に形成された尾ヒレ部材が取り付けられている、請求項1に記載の魚型バイオミメティクス装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は水中で稼働できるバイオミメティクスロボットに関し、特に、魚型バイオミメティクス装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
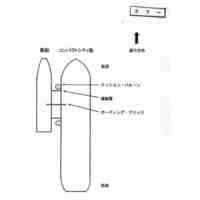
特許文献1に魚型バイオミメティクス装置の従来例が記載されており、魚の頭、魚の体、魚の尾にそれぞれ該当する部材はいずれも独立した水密シェル構造であり、この水密シェル構造の表面に塗布される透明で耐圧性のある防水材は水密シェル構造の防水性能を確保する。また、その内部にはコントローラーモジュール、無線通信モジュール、水質監視モジュール、魚検出モジュール、自律航行モジュールが搭載されるので、魚の群れに紛れ込みながら、魚の習性の観察や教育目的で利用することができる。
【先行技術文献】
【特許文献】
【0003】
中国特許出願公開第114758570A号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような従来の魚型バイオミメティクス装置では、魚類の胴体及び尾ヒレの揺動による遊泳運動を模倣することができない。そこで、本発明は魚類の遊泳運動をより高度に模倣できる魚型バイオミメティクス装置の提供を目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成すべく、本発明は、水中環境において前方へ移動可能な魚型バイオミメティクス装置であって、前後方向において互いに隣接するように配列される複数の筐体部材を有する魚型の筐体ユニットと、互いに隣接するいずれか2つの前記筐体部材の間に配置され、且つ、いずれもこの2つの前記筐体部材における前方側にある1つの前記筐体部材に取り付けられる第1のモータモジュールと、この2つの前記筐体部材における後方側にある1つの前記筐体部材に取り付けられると共に、上下方向に延伸する第1の軸線を回転軸として回転可能に前記第1のモータモジュールに接続される第1の回転部材とを有する複数の回転手段と、を備え、各前記回転手段がそれぞれ有する各前記第1のモータモジュールは、それぞれ個別に制御を受けて対応する前記第1の回転部材に対して前記第1の軸線を回転軸として所定角度の回転運動を行うにより、前記前方側にある前記筐体部材の前記後方側にある前記筐体部材に対する相対回転を駆動する、魚型バイオミメティクス装置を提供する。
【発明の効果】
【0006】
本発明の魚型バイオミメティクス装置は、魚型の筐体ユニットを構成する複数の筐体部材のうち前後に隣接する2つの筐体部材に回転手段を介在させることにより、後側にある筐体部材は前側にある筐体部材に対して左右揺動できるようになるので、魚類の遊泳運動をより高度に模倣できる。
【図面の簡単な説明】
【0007】
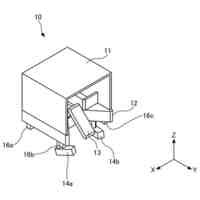
本発明の魚型バイオミメティクス装置の実施例が示される斜視図である。
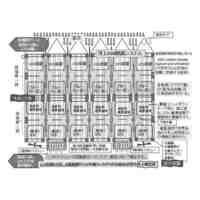
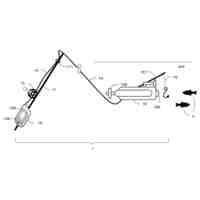
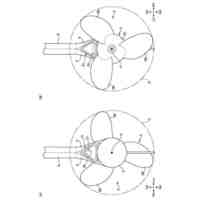
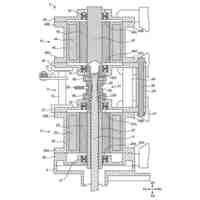
図1におけるII‐II線に沿った断面図である。
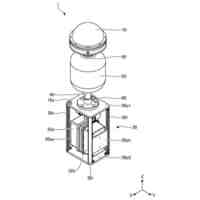
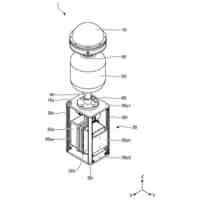
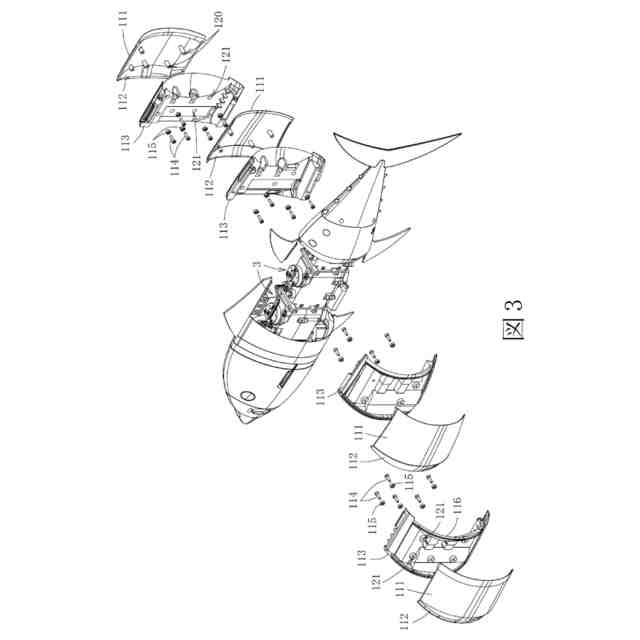
同実施例の分解斜視図である。
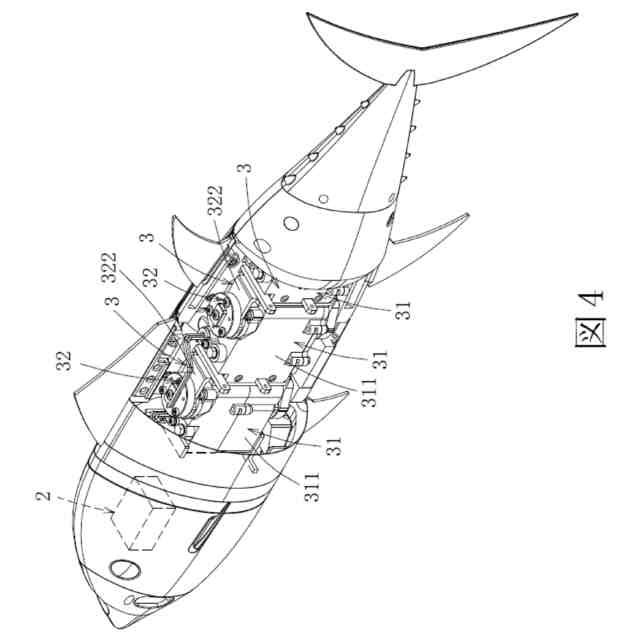
同実施例から2つの筐体部材が取り外された状態が示される斜視図である。
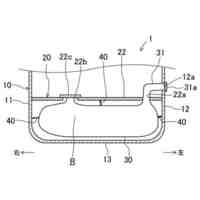
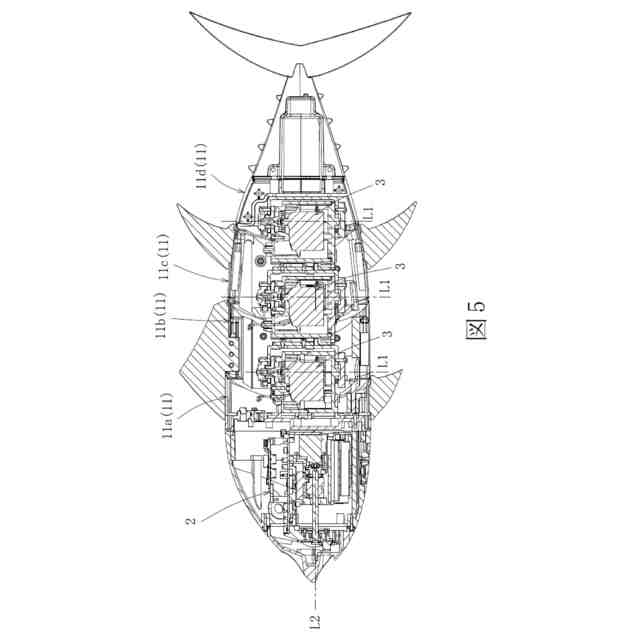
図1におけるV‐V線に沿った断面図である。
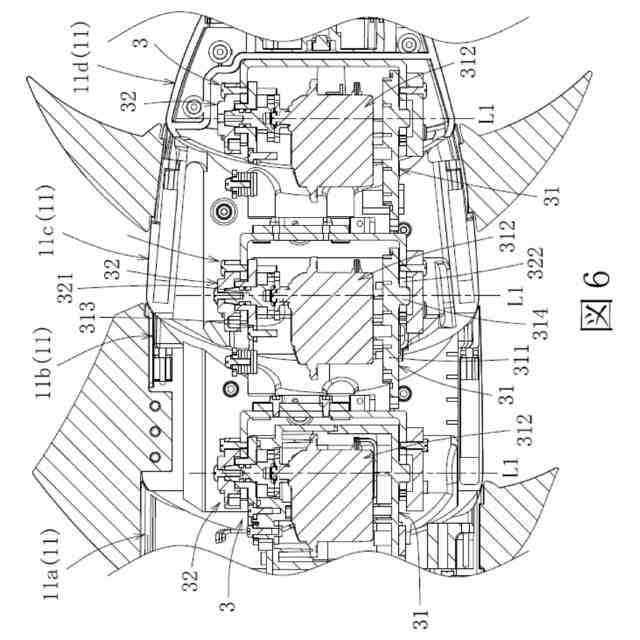
図5の一部拡大図である。
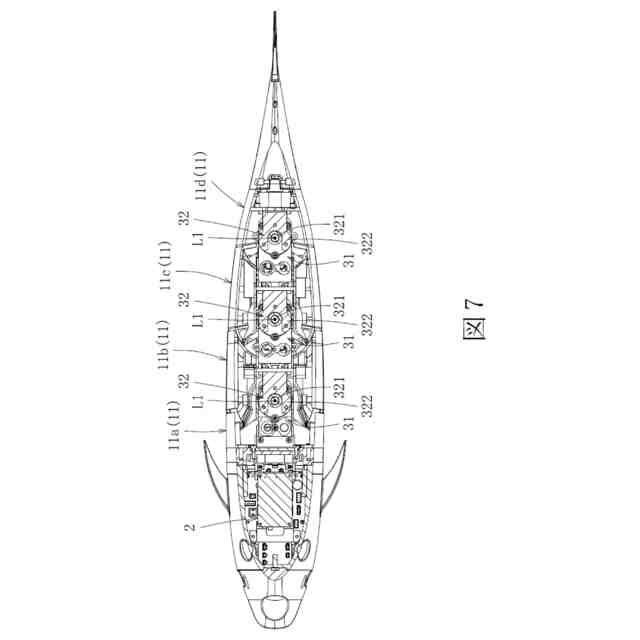
図1におけるVII‐VII線に沿った断面図である。
図7の一部拡大図である。
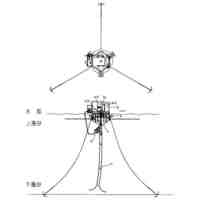
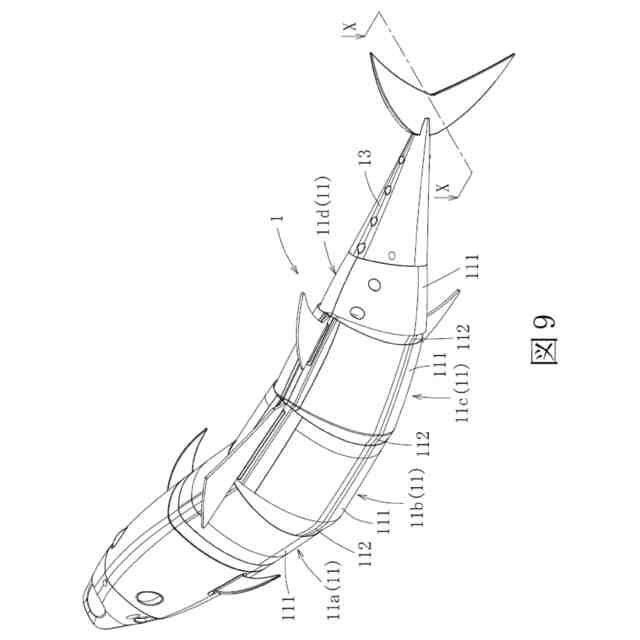
同実施例の湾曲状態が示される斜視図である。
図9におけるX‐X線に沿った断面図である。
図10の一部拡大図である。
図1と異なる角度が示される同実施例の斜視図である。
同実施例の一部拡大斜視図である。
同実施例の分解斜視図である。
図14と異なる角度で示される同実施例の分解斜視図である。
図14と異なる角度で示される同実施例の分解斜視図である。
同実施例における重心移動メカニズムが示される一部断面図である。
同実施例における重心移動メカニズムの動きが示される一部断面図である。
同実施例における重心移動メカニズムの動きが示される一部断面図である。
【発明を実施するための形態】
【0008】
本発明の実施形態の目的、技術手段、及び利点をより明確に説明するために、以下、本発明の実施形態の添付図面を組み合わせて、本発明の実施形態における技術手段に対して明確且つ完全に説明する。説明する実施形態は、本発明の一部の実施形態であり、すべての実施形態ではないことが明らかであろう。通常、添付図面に描きまた示す本発明の実施形態の部品は各種異なる配置で布置及び設計することができる。従って、以下、添付図面中に提供した本発明の実施形態の詳細説明は、本発明の保護範囲に対していかなる制限も構成せず、単に本発明の選択された実施形態を示すのみである。
【0009】
本発明をより詳細に説明する前に、適切と考えられる場合には、参照符号または参照符号の末端部分が、対応するまたは類似する要素を示すために図間で繰り返されており、これらは任意に同様の特性を有することができることに留意されたい。
【0010】
本発明の説明において、「上」、「下」、「内」、「外」、「左」、「右」、「前」、「後」などの方位や位置関係を示す用語は、より簡単且つ明瞭に説明するために、図面に示される方位や位置関係、または本発明の製品を使用する際に習慣的に置かれる方位や位置関係に基づくものであり、対応する装置やデバイスが特定の方位、特定の方位における構造や操作などを有することを教示または示唆するものではなく、本発明に対する限定ではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
水上遊具
2か月前
個人
洋上研究所
13日前
個人
川下り用船
8か月前
個人
シーアンカー
10か月前
個人
発電船
9か月前
個人
補助機構
4か月前
個人
船用横揺防止具
5か月前
個人
コンパクトシティ船
4か月前
個人
渦流動力推進構造
4か月前
小柳建設株式会社
台船
11か月前
個人
セールのバテンガイド装置
25日前
炎重工株式会社
浮標
6か月前
個人
水質浄化・集熱昇温システム
1か月前
炎重工株式会社
浮標
6か月前
個人
水陸両用移動装置
12か月前
住友重機械工業株式会社
船舶
1か月前
炎重工株式会社
移動体
9か月前
株式会社フルトン
水中捕捉装置
4か月前
個人
スクリュープロペラ
4か月前
個人
船舶
6か月前
株式会社ラフティ
サーフボード
1か月前
オーケー工業株式会社
係留フック
5か月前
個人
回転式による流体流出防止タンカー
4か月前
スズキ株式会社
船外機
4か月前
スズキ株式会社
船外機
4か月前
株式会社テラサン
位置保持システム
10か月前
ヤマハ発動機株式会社
船外機
6か月前
株式会社アカデミー出版
船舶
11日前
スズキ株式会社
船外機
3か月前
スズキ株式会社
船外機
3か月前
常石造船株式会社
メタノール燃料船
7か月前
株式会社ユピテル
システム及びプログラム等
3か月前
藤倉コンポジット株式会社
架台
7か月前
炎重工株式会社
自律航行浮遊体
6か月前
株式会社神戸タフ興産
船舶の甲板構造
8か月前
スズキ株式会社
船舶推進機
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ