TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025117379
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024012191
出願日
2024-01-30
発明の名称
情報処理装置、形状差分モデルの生成方法、推定方法、および推定プログラム
出願人
カナデビア株式会社
,
国立大学法人 奈良先端科学技術大学院大学
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B66C
13/32 20060101AFI20250804BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】演算量を抑えつつ、堆積物の表面形状の変化を精度よく推定する。
【解決手段】情報処理装置(1)は、所定の堆積物の表面形状を変化させる所定の事象の発生前における、当該堆積物の表面形状を示す形状情報を取得する形状情報取得部(102)と、所定の事象の発生前後の表面形状の差を、所定の事象による表面形状の変化をモデル化した形状差分モデル(111)と、取得された形状情報とを用いて推定する差分推定部(103)と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
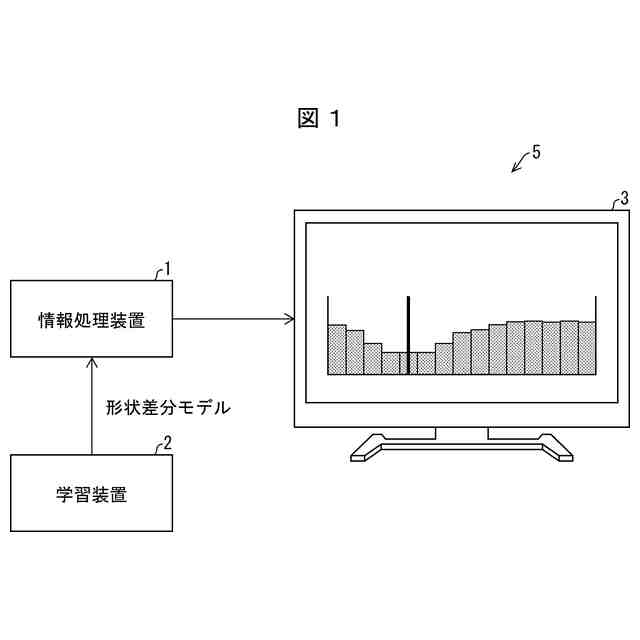
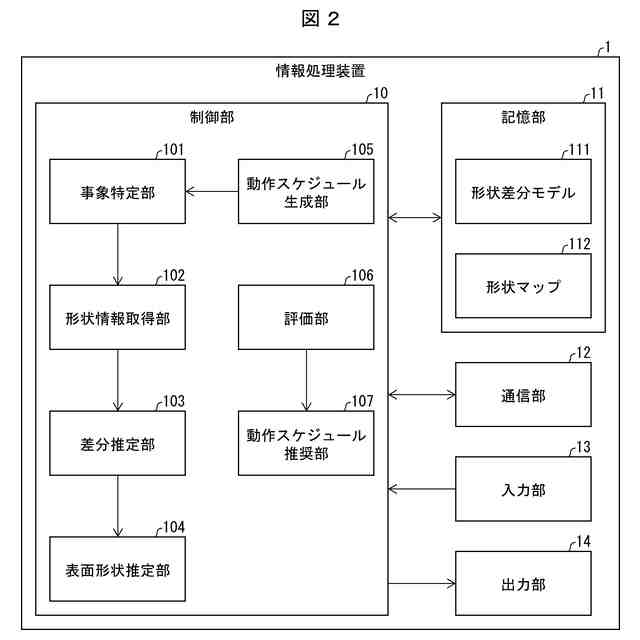
所定の堆積物の表面形状を変化させる所定の事象の発生前における、当該堆積物の表面形状を示す形状情報を取得する形状情報取得部と、
前記所定の事象の発生前後の前記表面形状の差を、前記所定の事象による表面形状の変化をモデル化した形状差分モデルと、前記形状情報とを用いて推定する差分推定部と、を備える情報処理装置。
続きを表示(約 1,800 文字)
【請求項2】
前記形状差分モデルは、前記所定の事象が発生した位置に設定された所定サイズの対象領域における、当該所定の事象の発生前の表面形状と、当該所定の事象の発生前後の表面形状の差との関係を学習することにより生成されたモデルであり、
前記形状情報取得部は、前記所定の事象が発生した位置の前記所定サイズの領域における前記堆積物の表面形状を示す前記形状情報を取得する、請求項1に記載の情報処理装置。
【請求項3】
前記形状差分モデルは、前記対象領域を区分した複数の区画のそれぞれにおける前記所定の事象の発生前の前記堆積物の堆積高さと、当該複数の区画の1つにおける前記所定の事象の発生前後の前記堆積物の堆積高さの差との関係を学習することにより生成された学習済みのモデルであり、
前記差分推定部は、前記所定の事象が発生した位置の前記所定サイズの領域を区分した複数の区画のそれぞれについて、前記形状差分モデルを用いて前記堆積物の堆積高さの差を推定する、請求項2に記載の情報処理装置。
【請求項4】
前記形状差分モデルは、クレーンのバケットにより掴まれた前記堆積物が落とされるという前記所定の事象について、当該堆積物が落とされる前の、落とされる位置における堆積物の表面形状および落とされる前記堆積物の重量と、落とされる前後の表面形状の差との関係を学習することにより生成された学習済みのモデルであり、
前記差分推定部は、前記所定の事象の発生前後の前記表面形状の差を、前記形状差分モデルと、前記形状情報と、落とされる堆積物の重量を示す重量情報と、を用いて推定する、請求項1から3の何れか1項に記載の情報処理装置。
【請求項5】
前記形状情報と、前記差分推定部が推定した表面形状の差とを用いて、前記所定の事象の発生後における前記堆積物の表面形状を推定する表面形状推定部を備える、請求項1から3の何れか1項に記載の情報処理装置。
【請求項6】
前記堆積物は、ピットに収容された廃棄物であり、
前記表面形状推定部は、前記差分推定部の推定結果に基づき、前記ピット内の各位置における廃棄物の表面形状を示す形状マップを更新し、
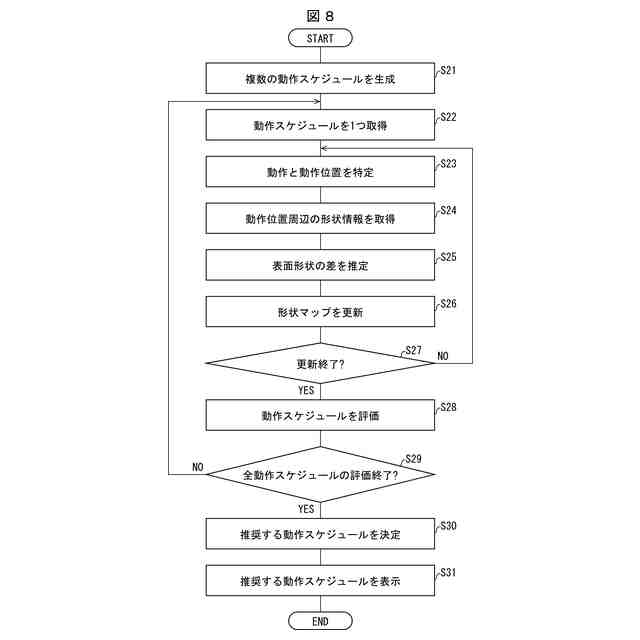
前記ピット内で前記廃棄物を運搬するクレーンのバケットにより廃棄物の掴みおよび落としの各動作を繰り返し行う一連の動作を示す動作スケジュールにおける各動作位置について、前記差分推定部により当該動作位置における当該動作の前後の表面形状の差を推定する処理と、前記表面形状推定部により前記形状マップを更新する処理とを繰り返し行う、請求項5に記載の情報処理装置。
【請求項7】
前記動作スケジュールに示される一連の動作を実行した後の前記ピットにおける廃棄物の表面形状を示す前記形状マップに基づいて当該動作スケジュールを評価する評価部と、
前記評価部による1または複数の動作スケジュールの評価結果に基づき、推奨する動作スケジュールを決定する動作スケジュール推奨部と、を備える請求項6に記載の情報処理装置。
【請求項8】
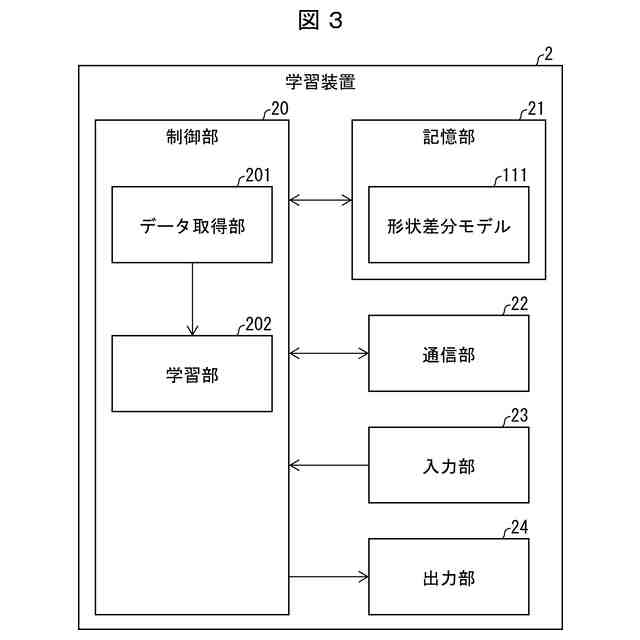
少なくとも1つの情報処理装置が実行する形状差分モデルの生成方法であって、
所定の堆積物の表面形状を変化させる所定の事象の発生前における、当該表面形状を示す形状情報に対し、当該所定の事象の発生前後の前記表面形状の差を対応付けた訓練データを取得するデータ取得ステップと、
前記訓練データを用いた機械学習により、入力された形状情報に応じた、前記所定の事象の発生前後の表面形状の差を出力する形状差分モデルを生成する学習ステップと、を含む形状差分モデルの生成方法。
【請求項9】
少なくとも1つの情報処理装置が実行する推定方法であって、
所定の堆積物の表面形状を変化させる所定の事象の発生前における、当該堆積物の表面形状を示す形状情報を取得する形状情報取得ステップと、
前記所定の事象の発生前後の前記表面形状の差を、前記所定の事象による表面形状の変化をモデル化した形状差分モデルと、前記形状情報とを用いて推定する推定ステップと、を含む推定方法。
【請求項10】
請求項1に記載の情報処理装置としてコンピュータを機能させるための推定プログラムであって、前記形状情報取得部および前記差分推定部としてコンピュータを機能させるための推定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、堆積物の表面形状の変化に関する推定を行う情報処理装置等に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
家庭ごみなどの各種廃棄物は、処理施設に集められ、処理施設に設けられた廃棄物ピット内に一時的に貯留された後、焼却する等して処分される。このような廃棄物ピットの運用の省力化のため、廃棄物ピット内で廃棄物を運搬するクレーンの自動運転化が進められている。
【0003】
例えば、下記の特許文献1には、光パルスを利用した距離計測手段により計測したごみの表面までの距離を示す距離データを用いてクレーンの運転制御を行う搬送装置が開示されている。この搬送装置によれば、高さの高いところのごみをクレーンのバケットで掴み取ってごみホッパに投入する、といった短期的な自動運転制御を実現することが可能になる。
【先行技術文献】
【特許文献】
【0004】
特開2000-143151号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の搬送装置には、長期的にみて最適な運転制御を実現することが難しいという点で改良の余地がある。しかし、長期的にみて最適な運転制御を実現するためには、高次元なデータ形式で表現されるピット内廃棄物の表面形状がどのように遷移するかを推定する必要がある。そして、高次元データの遷移の推定を高精度に行うためには大量の訓練データを用いた学習を行って高精度な推定モデルを生成する必要がある。また、そのような学習を経て表面形状の推定モデルを作成し得たとしても、そのような推定モデルを用いる場合には、推定に要する演算量が過大になるという問題がある。なお、このような問題は、ピット内の廃棄物に限られず、何らかの事象によりその表面形状が変化する堆積物を扱う際に、共通して生じる問題である。
【0006】
本発明の一態様は、演算量を抑えつつ、堆積物の表面形状の変化を精度よく推定することが可能な情報処理装置等を実現することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明の一態様に係る情報処理装置は、所定の堆積物の表面形状を変化させる所定の事象の発生前における、当該堆積物の表面形状を示す形状情報を取得する形状情報取得部と、前記所定の事象の発生前後の前記表面形状の差を、前記所定の事象による表面形状の変化をモデル化した形状差分モデルと、前記形状情報とを用いて推定する差分推定部と、を備える。
【0008】
上記の課題を解決するために、本発明の一態様に係る形状差分モデルの生成方法は、少なくとも1つの情報処理装置が実行する形状差分モデルの生成方法であって、所定の堆積物の表面形状を変化させる所定の事象の発生前における、当該表面形状を示す形状情報に対し、当該所定の事象の発生前後の前記表面形状の差を対応付けた訓練データを取得するデータ取得ステップと、前記訓練データを用いた機械学習により、入力された形状情報に応じた、前記所定の事象の発生前後の表面形状の差を出力する形状差分モデルを生成する学習ステップと、を含む。
【0009】
上記の課題を解決するために、本発明の一態様に係る推定方法は、少なくとも1つの情報処理装置が実行する推定方法であって、所定の堆積物の表面形状を変化させる所定の事象の発生前における、当該堆積物の表面形状を示す形状情報を取得する形状情報取得ステップと、前記所定の事象の発生前後の前記表面形状の差を、前記所定の事象による表面形状の変化をモデル化した形状差分モデルと、前記形状情報とを用いて推定する推定ステップと、を含む。
【発明の効果】
【0010】
本発明の一態様によれば、演算量を抑えつつ、堆積物の表面形状の変化を精度よく推定することが可能になる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
カナデビア株式会社
サクション基礎
7日前
カナデビア株式会社
封止装置および電池製造方法
13日前
カナデビア株式会社
全固体電池およびその製造方法
8日前
カナデビア株式会社
電池製造装置および電池製造方法
9日前
カナデビア株式会社
電池製造装置および電池製造方法
13日前
カナデビア株式会社
情報処理装置および情報管理システム
6日前
カナデビア株式会社
積層型電池および積層型電池の製造方法
7日前
カナデビア株式会社
線形摩擦接合方法および線形摩擦接合装置
8日前
カナデビア株式会社
全固体電池の製造方法および電池製造装置
7日前
カナデビア株式会社
吸収転換触媒及び炭化水素化合物の製造方法
1か月前
カナデビア株式会社
情報処理装置、学習方法、および学習プログラム
9日前
カナデビア株式会社
情報処理装置、学習方法、および学習プログラム
6日前
カナデビア株式会社
異常検知システム、異常検知方法、及び制御プログラム
17日前
カナデビア株式会社
制御装置、水電解システム、制御方法および制御プログラム
7日前
カナデビア株式会社
情報処理装置、情報処理プログラム、情報処理システムおよび情報端末装置
6日前
カナデビア株式会社
スケジュール管理装置、スケジュール管理方法、及びスケジュール管理プログラム
15日前
国立大学法人 奈良先端科学技術大学院大学
データ作成システムおよびデータ作成方法
27日前
個人
自走手摺
3か月前
ユニパルス株式会社
吊具
4か月前
個人
海上コンテナ昇降装置
10か月前
ユニパルス株式会社
荷役装置
9か月前
ユニパルス株式会社
吊具装置
10か月前
株式会社豊田自動織機
産業車両
11か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
8か月前
株式会社いうら
車椅子用昇降機
2か月前
水戸工業株式会社
吊り具
6か月前
株式会社豊田自動織機
産業車両
1か月前
ユニパルス株式会社
リフト装置
4か月前
株式会社伊藤
滑り止め装置
2か月前
愛知製鋼株式会社
受け架台
1か月前
個人
垂直自動搬送機
1か月前
ユニパルス株式会社
荷役助力装置
3か月前
株式会社大林組
安全支援システム
1か月前
個人
エアバック式レスキュー用品
9日前
白山工業株式会社
バランサ
6か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ