TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025143030
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042711
出願日
2024-03-18
発明の名称
スケジュール管理装置、スケジュール管理方法、及びスケジュール管理プログラム
出願人
カナデビア株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G06Q
10/20 20230101AFI20250924BHJP(計算;計数)
要約
【課題】作業実施体の作業スケジュールを考慮して作業ロボットの作業スケジュールを管理するスケジュール管理装置を提供する。
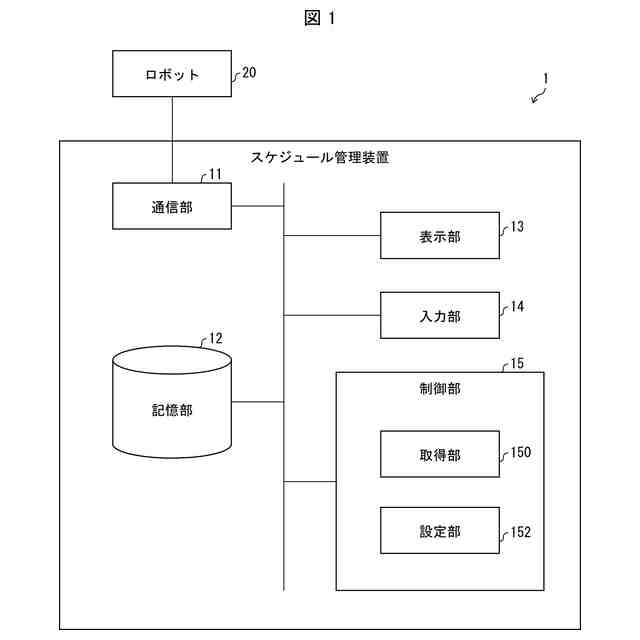
【解決手段】異なる位置に存在する複数の作業対象に移動し、各作業対象について作業を行う自走式のロボット(20)の作業スケジュールを管理するスケジュール管理装置であって、ロボット(20)とは異なる作業実施体の作業スケジュールを取得する取得部(150)と、ロボット(20)のスケジュールを設定する設定部(152)と、を備え、設定部(152)は、作業実施体が第1作業対象および第1作業対象の近傍に位置する第2作業対象の少なくとも一方について作業する日時と、ロボット(20)が第1作業対象について作業する日時とが重複しないという条件が優先的に満たされるようにロボット(20)の作業の順序を設定する。
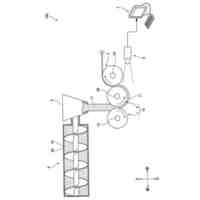
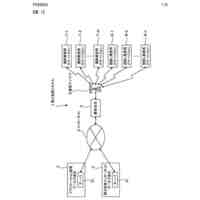
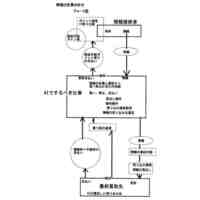
【選択図】図1
特許請求の範囲
【請求項1】
異なる位置に存在する複数の作業対象に移動し、各作業対象について作業を行う自走式のロボットの作業スケジュールを管理するスケジュール管理装置であって、
前記ロボットとは異なる作業実施体の作業スケジュールを取得する取得部と、
前記ロボットのスケジュールを設定する設定部と、を備え、
前記設定部は、前記作業実施体が第1作業対象および前記第1作業対象の近傍に位置する第2作業対象の少なくとも一方について作業する日時と、前記ロボットが前記第1作業対象について作業する日時とが重複しないという条件が優先的に満たされるように前記ロボットの作業の順序を設定する、スケジュール管理装置。
続きを表示(約 940 文字)
【請求項2】
前記ロボットが前記第1作業対象についての作業を行う作業位置が初期位置として予め設定されており、
前記ロボットが前記第1作業対象について作業する日時と、前記作業実施体が前記第1作業対象または前記第2作業対象について作業する日時とが重複する場合において、前記設定部は、前記ロボットが前記第1作業対象について作業するときの前記作業位置を前記初期位置から変更する、請求項1に記載のスケジュール管理装置。
【請求項3】
前記ロボットが前記複数の作業対象のうちの1つである第3作業対象について作業する前に、前記第3作業対象を基準とする所定の範囲内に前記作業実施体の存在が検知された場合に、前記第3作業対象よりも先に他の前記作業対象について作業するよう、前記ロボットの作業の順序を変更する変更部を備える、請求項1に記載のスケジュール管理装置。
【請求項4】
前記ロボットが前記複数の作業対象のうちの1つである第3作業対象についての作業を行う作業位置が初期位置として予め設定されており、
前記作業実施体の存在により前記初期位置からの前記第3作業対象についての作業が困難である場合、前記ロボットの前記作業位置を前記初期位置から変更する第2変更部を備えている、請求項1に記載のスケジュール管理装置。
【請求項5】
異なる位置に存在する複数の作業対象に移動し、各作業対象について作業を行う自走式のロボットの作業スケジュールを管理するスケジュール管理方法であって、
前記ロボットとは異なる作業実施体の作業スケジュールを取得する取得工程と、
前記ロボットのスケジュールを設定する設定工程と、を含み、
前記設定工程にて、前記作業実施体が第1作業対象および前記第1作業対象の近傍に位置する第2作業対象の少なくとも一方について作業する日時と、前記ロボットが前記第1作業対象について作業する日時とが重複しないという条件が優先的に満たされるように前記ロボットの作業の順序を設定する、スケジュール管理方法。
【請求項6】
請求項5に記載の各工程をコンピュータに実行させるスケジュール管理プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、スケジュール管理装置、スケジュール管理方法、及びスケジュール管理プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
自律走行可能なロボット装置が移動しながらカメラで撮影した画像の中に人が含まれる場合に、作業の予定を示す作業管理情報に基づいて、前記画像の撮影の場所及び時刻における作業員による作業の異常の有無を判定する技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2023-5746号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の技術は、作業員が予定外の誤った作業を行っているかどうかを判定する技術であり、作業ロボットの作業スケジュールに関して、作業ロボットと、作業員など他の作業実施体との関係は考慮されていない。
【0005】
本開示の一態様は、上記課題を鑑み、作業実施体の作業スケジュールを考慮して作業ロボットの作業スケジュールを管理する、スケジュール管理装置、スケジュール管理方法、及びスケジュール管理プログラムを実現することを目的とする。
【課題を解決するための手段】
【0006】
前記の課題を解決するために、本開示の一態様に係るスケジュール管理装置は、異なる位置に存在する複数の作業対象に移動し、各作業対象について作業を行う自走式のロボットの作業スケジュールを管理するスケジュール管理装置であって、前記ロボットとは異なる作業実施体の作業スケジュールを取得する取得部と、前記ロボットのスケジュールを設定する設定部と、を備え、前記設定部は、前記作業実施体が第1作業対象および前記第1作業対象の近傍に位置する第2作業対象の少なくとも一方について作業する日時と、前記ロボットが前記第1作業対象について作業する日時とが重複しないという条件が優先的に満たされるように前記ロボットの作業の順序を設定する。
【0007】
前記の課題を解決するために、本開示の一態様に係るスケジュール管理方法は、異なる位置に存在する複数の作業対象に移動し、各作業対象について作業を行う自走式のロボットの作業スケジュールを管理するスケジュール管理方法であって、前記ロボットとは異なる作業実施体の作業スケジュールを取得する取得工程と、前記ロボットのスケジュールを設定する設定工程と、を含み、前記設定工程にて、前記作業実施体が第1作業対象および前記第1作業対象の近傍に位置する第2作業対象の少なくとも一方について作業する日時と、前記ロボットが前記第1作業対象について作業する日時とが重複しないという条件が優先的に満たされるように前記ロボットの作業の順序を設定する。
【発明の効果】
【0008】
本開示は、作業実施体の作業スケジュールを考慮して作業ロボットのスケジュールを管理する、スケジュール管理装置及びスケジュール管理方法を実現できる。
【図面の簡単な説明】
【0009】
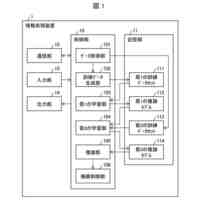
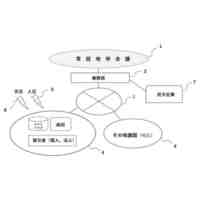
本開示に係るスケジュール管理装置の機能ブロック図である。
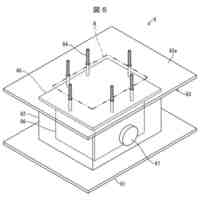
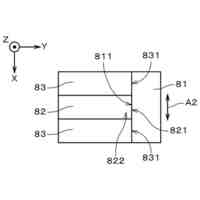
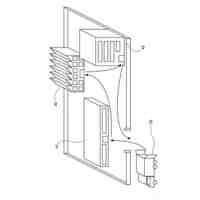
本開示に係るロボットの一例を示す図である。
ロボットの作業スケジュールを設定する方法を示すフローチャートである。
ロボットの作業スケジュールを設定する方法を示すフローチャートである。
保守作業スケジュール情報の一例を示す図である。
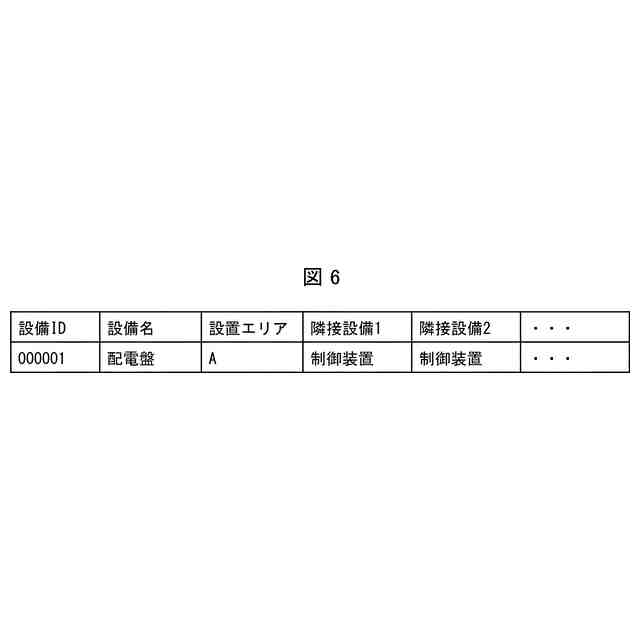
設備管理情報の一例を示す図である。
ロボットの点検スケジュール情報の一例を示す図である。
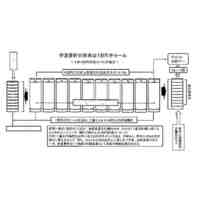
施設内のロボット本体と、ロボット本体におけるロボットの点検ルートの一例を示す。
隣接する2つのエリア間のロボットの平均移動時間、及び、各エリアでのロボットの平均作業時間の一例を説明するための図である。
ロボットが各エリアに到達する予定時刻、及び、ロボットの各エリアにおける滞在時間の一例を示す図である。
設定部がロボットの作業順序を変更した後のロボットの点検ルートの一例を示す。
本開示に係るスケジュール管理装置の機能ブロック図である。
変更部がロボットの作業順序を変更する例を示す図である。
変更部がロボットの作業順序を変更する例を示す図である。
第2変更部がロボットの作業位置を変更する例を示す図である。
点検位置に優先度が設定される例を説明する図である。
第2変更部がロボットの点検位置を変更するフローチャートである。
本開示に係るスケジュール管理装置のスケジュール管理方法のフローチャートである。
【発明を実施するための形態】
【0010】
〔スケジュール管理装置1〕
以下、図1等を参照しながら、本開示に係るスケジュール管理装置1について説明する。図1は、スケジュール管理装置1の機能ブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
カナデビア株式会社
サクション基礎
9日前
カナデビア株式会社
封止装置および電池製造方法
15日前
カナデビア株式会社
全固体電池およびその製造方法
10日前
カナデビア株式会社
電池製造装置および電池製造方法
11日前
カナデビア株式会社
電池製造装置および電池製造方法
15日前
カナデビア株式会社
情報処理装置および情報管理システム
8日前
カナデビア株式会社
積層型電池および積層型電池の製造方法
9日前
カナデビア株式会社
全固体電池の製造方法および電池製造装置
9日前
カナデビア株式会社
線形摩擦接合方法および線形摩擦接合装置
10日前
カナデビア株式会社
吸収転換触媒及び炭化水素化合物の製造方法
1か月前
カナデビア株式会社
情報処理装置、学習方法、および学習プログラム
8日前
カナデビア株式会社
情報処理装置、学習方法、および学習プログラム
11日前
カナデビア株式会社
異常検知システム、異常検知方法、及び制御プログラム
19日前
カナデビア株式会社
樹脂シートの押出成形装置及び樹脂シートの押出成形方法
1か月前
カナデビア株式会社
制御装置、水電解システム、制御方法および制御プログラム
9日前
カナデビア株式会社
情報処理装置、情報処理プログラム、情報処理システムおよび情報端末装置
8日前
カナデビア株式会社
スケジュール管理装置、スケジュール管理方法、及びスケジュール管理プログラム
17日前
国立大学法人 奈良先端科学技術大学院大学
データ作成システムおよびデータ作成方法
29日前
個人
詐欺保険
4日前
個人
縁伊達ポイン
4日前
個人
地球保全システム
17日前
個人
QRコードの彩色
8日前
個人
冷凍食品輸出支援構造
1か月前
個人
為替ポイント伊達夢貯
1か月前
個人
表変換編集支援システム
1か月前
個人
残土処理システム
10日前
個人
農作物用途分配システム
3日前
個人
知財出願支援AIシステム
1か月前
個人
知的財産出願支援システム
11日前
個人
AIによる情報の売買の仲介
1か月前
個人
行動時間管理システム
1か月前
個人
パスワード管理支援システム
1か月前
個人
パスポートレス入出国システム
1か月前
株式会社アジラ
進入判定装置
1か月前
個人
AIキャラクター制御システム
1か月前
株式会社キーエンス
受発注システム
16日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ