TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025119597
公報種別
公開特許公報(A)
公開日
2025-08-14
出願番号
2025012826
出願日
2025-01-29
発明の名称
コンピュータ支援骨盤外科手術ナビゲーション
出願人
グローバス メディカル インコーポレイティッド
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
A61B
34/20 20160101AFI20250806BHJP(医学または獣医学;衛生学)
要約
【課題】骨盤外科手術のための外科手術ナビゲーションシステムを提供する。
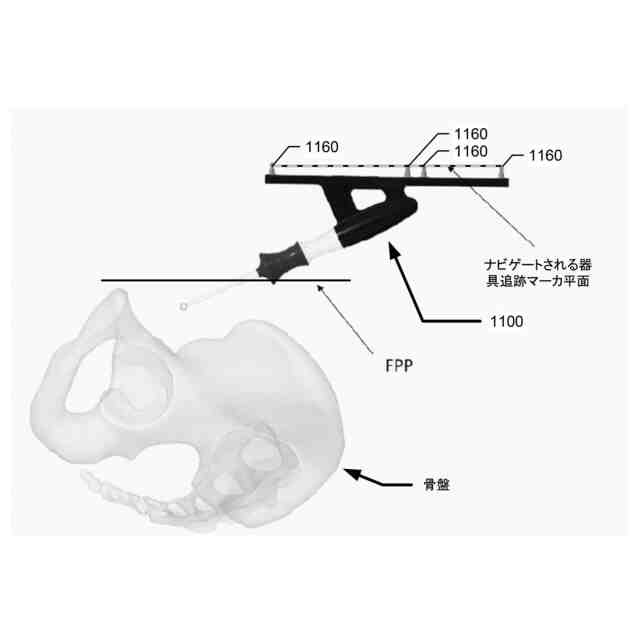
【解決手段】外科手術中のコンピュータ支援ナビゲーションのためのシステムは、ナビゲートされる器具が患者の骨盤骨の表面上に定義された目印を動悸している場所のセットを識別するように動作するコンピュータプラットフォームを含む。更なる動作は、ナビゲートされる器具が目印を動悸している識別された場所のセットに基づいて、患者の骨盤寛骨臼についての回転中心を判定する。動作は、ナビゲートされる器具が目印を動悸している識別された場所のセットに基づいて、かつ骨盤寛骨臼についての判定された回転中心に基づいて、患者の前骨盤平面(APP)及び/又は機能的骨盤平面(FPP)の配向を判定する。
【選択図】図13C
特許請求の範囲
【請求項1】
外科手術中のコンピュータ支援ナビゲーションのためのシステムであって、
ナビゲートされる器具が動悸している患者の骨盤骨の表面上の場所のセットを、前記ナビゲートされる器具が追跡システムによって追跡されている間に識別し、
識別された前記場所のセットに基づいて、前記患者の骨盤寛骨臼についての回転中心を判定し、
前記追跡システムが前記ナビゲートされる器具を追跡している間に、前記ナビゲートされる器具を使用して、前記患者の前骨盤平面(APP)及び/又は機能的骨盤平面(FPP)の配向を判定し、
判定された前記APP又は前記FPPと、前記骨盤寛骨臼についての判定された前記回転中心と、に基づいて、前記追跡システムの座標系において、前記骨盤を位置合わせする、
ように動作可能なコンピュータプラットフォームを備える、システム。
続きを表示(約 1,300 文字)
【請求項2】
前記APPの前記配向を判定するために、前記コンピュータプラットフォームは、前記追跡システムによる前記ナビゲートされる器具の追跡に基づいて、前記患者の前記骨盤骨の右上前腸骨棘、左上前腸骨棘、及び恥骨結合部の場所を記録する、請求項1に記載のシステム。
【請求項3】
前記FPPの前記配向を判定するために、前記コンピュータプラットフォームは、
前記追跡システムによる前記ナビゲートされる器具の追跡に基づいて、前記患者の前記骨盤骨の上下軸、左右軸、及び/又は前後軸を識別するように更に動作可能である、請求項1に記載のシステム。
【請求項4】
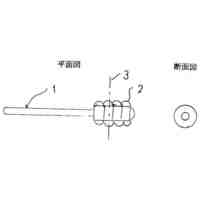
前記コンピュータプラットフォームは、前記ナビゲートされる器具上のロッドが前記上下軸に平行であるとき、前記ナビゲートされる器具の姿勢を記録することによって、前記上下軸を識別する、請求項3に記載のシステム。
【請求項5】
前記APPの前記配向を判定するために、前記コンピュータプラットフォームは、
前記ナビゲートされる器具が前記患者の前記骨盤骨の上下軸、左右軸、及び/又は前後軸を識別しているときに、前記ナビゲートされる器具の前記姿勢を記録するように更に動作可能である、請求項1に記載のシステム。
【請求項6】
患者の骨盤骨の表面上の場所のセットを識別するとき、前記コンピュータプラットフォームは、前記ナビゲートされる器具の姿勢及び前記骨盤に取り付けられた患者動的参照ベースを連続的に追跡するように動作可能である、請求項1に記載のシステム。
【請求項7】
前記コンピュータプラットフォームは、
前記ナビゲートされる器具が寛骨臼窩上の最深点に接触している別の場所を識別し、
識別された前記別の場所に基づいて、最大寛骨臼リーマ加工深さを判定する、
ように更に動作可能である、請求項1に記載のシステム。
【請求項8】
前記APP及び/又は前記FPPの前記配向、並びに骨盤寛骨臼の前記回転中心は、術前画像を使用せずに判定される、請求項1に記載のシステム。
【請求項9】
前記コンピュータプラットフォームは、
外科手術中のコンピュータ支援ナビゲーションのための計画ビューにおいて、前記APP及び/又は前記FPPの判定された前記配向のグラフィカル表現を表示するように更に動作可能である、請求項1に記載のシステム。
【請求項10】
前記コンピュータプラットフォームは、
前記ナビゲートされる器具が大腿骨の解剖学的軸の出口点に少なくとも近接する近位大腿骨大転子領域を動悸する、前記場所のセットとは別個の第1の場所を識別し、
前記ナビゲートされる器具が前記大腿骨の遠位部分の既知の場所を動悸する、前記場所のセットとは別個の第2の場所を識別し、
識別された前記第1の場所及び識別された前記第2の場所に基づいて、前記患者の脚長及び内外大腿骨位置付けオフセットを判定する、
ように更に動作可能である、請求項1に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、医療デバイス及びシステムに関し、より具体的には、骨盤外科手術のための外科手術ナビゲーションシステムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
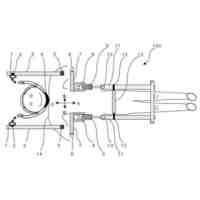
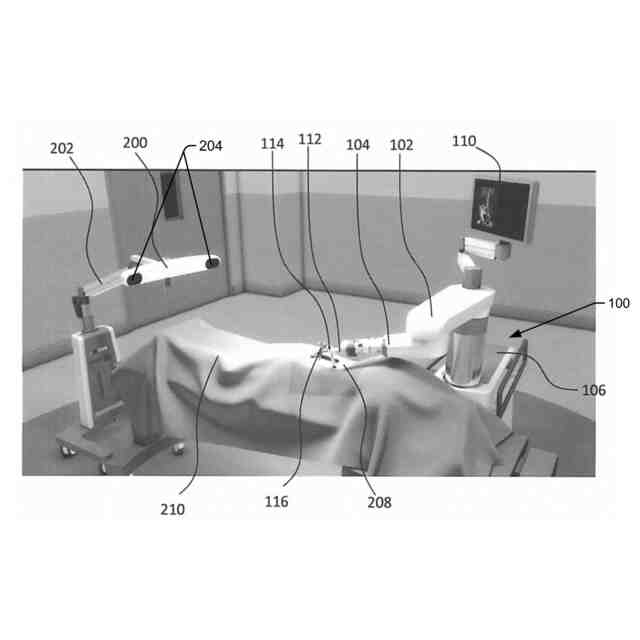
コンピュータ支援外科手術ナビゲーションシステムは、患者に対して姿勢をとる外科用器具又は他のデバイスが、患者の解剖学的構造の医療画像に対する姿勢にどのように相関するか、及びそれらの姿勢が術前外科的計画にどのように相関するかについてのコンピュータ化された視覚化を外科医に提供するための、手術室における十分に確立された技術となっている。コンピュータ支援外科手術ナビゲーションのためのカメラ追跡システムは、典型的には、患者に固定された患者参照要素(同様に「動的参照ベース」(dynamic reference base、DRB))に対して、外科手術中に外科医によって位置付けられている、外科用器具上の参照要素の姿勢を追跡するために追跡カメラのセットを使用する。実際の器具のコンピュータモデルは、コンピュータモデルが患者の解剖学的構造の位置合わせされた画像上に重ねられ得るように、参照要素と関連付けられる。カメラ追跡システムは、実際の器具が患者に対してどのように姿勢をとるかを判定するために、かつ実際の器具のコンピュータモデルが医療画像上のオーバーレイとしてどのように対応して姿勢をとるかを判定するために、参照要素の相対的な姿勢を使用する。それにより、外科医は、患者の外科的処置中に外科用器具をナビゲートするために、相対的な姿勢のリアルタイムの視覚的フィードバックを使用することができる。
【0003】
鋸刃をガイドする受動的構造体が装着されているシリアルアームを有する膝置換のためのロボットシステムを使用することができる。例えば、矢状鋸は、切断平面をガイドするために、受動的構造体の端部に取り付けることができる。システムは、外科医が、ナビゲーションシステム(例えば、独立型ディスプレイ又は拡張現実(Augmented Reality、AR)ヘッドセット)上で、外科的処置の定義された計画及び/又は進行に関連付けられた様々なタイプの関連するフィードバック及び情報を見ながら、矢状鋸を保持し、骨を切断することを可能にすることができる。
【0004】
シリアルアームは、例えば、フットペダル、タッチスクリーン、AR相互作用などを介して提供され得る外科医の要求に従って、コンピュータガイド制御を通して外科手術のための好適な位置に移動させることができる。受動的構造体は、外科医が切断平面において骨を正確に除去することを可能にする。骨除去の進行は、骨及び矢状鋸に取り付けられた参照要素の基準点のカメラ追跡を通して測定することができる。
【0005】
様々なワークフローは、システムとともに使用するために利用可能であり得る。いくつかのワークフローは、患者の術前スキャン又は画像(例えば、X線、コンピュータ断層撮影(Computerized Tomography、CT))を必要とする。一方、画像無しワークフローは、術前画像を必要としない。患者の解剖学的構造に関する術中情報を得るために、外科医は、患者の解剖学的構造上の点を捕捉するために、カメラ追跡システム及び適切な追跡された器具を使用して、骨の重要なパラメータを測定する。後に、この情報は、患者の解剖学的構造に対するインプラントの位置及び配向を計画し、外科的処置中にロボット及び外科用器具をナビゲートするために使用される。
【0006】
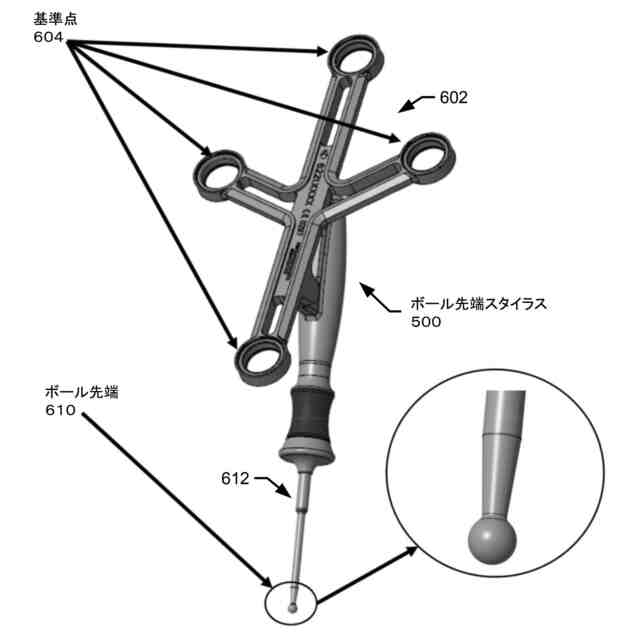
いくつかのワークフローは、外科医に、参照要素を1つ以上の骨に堅固に取り付けさせることを含み、参照要素は、コンピュータ支援ナビゲーションのために追跡カメラによって検出される基準点を含む。参照要素は、ナビゲーションシステムによる骨の位置の追跡を可能にする。参照要素は、以下の方法で、骨上に位置付けることができる:固定構造(例えば、ねじピン、「クロコダイル」ジョー)を用いて、骨(例えば、実行される外科的処置に応じて、骨盤又は大腿骨及び脛骨)上に取り付けられ、ナビゲーションシステムの追跡カメラによって見ることができるように配向される。参照要素の位置及び配向は、骨に対して堅固に固定されたままでなければならない。
【0007】
様々なワークフローの別のステップは、ナビゲーションシステムの追跡空間において、患者を位置合わせすることである。患者の位置合わせは、患者の解剖学的構造を、対応する骨の数値表現、通常は、骨の3Dモデルと照合することを含むことができる。骨表現は、CT画像のセットから構築されるか(CTワークフロー)、又は一般的な骨モデルに基づくか(画像無しワークフロー)のいずれかであり得る。
【0008】
現在の外科的処置は、患者の骨目印が追跡のために適切に位置合わせされると、高度なコンピュータ支援ナビゲーションを提供するが、位置合わせのための現在の処置は、より自動化され、外科手術中のより正確な支援ナビゲーションをもたらすように、改善されるべきである。
【発明の概要】
【0009】
本開示のいくつかの実施形態は、外科手術中のコンピュータ支援ナビゲーションのためのシステムを対象にしている。システムは、ナビゲートされる器具が患者の骨盤骨、大腿骨、又はその両方の表面上に定義された目印に接触している場所のセットを識別するように動作するコンピュータプラットフォームを含む。更なる動作は、ナビゲートされる器具が目印を触知している識別された場所のセットに基づいて、患者の骨盤寛骨臼についての回転中心を判定する。動作は、ナビゲートされる器具が目印に接触している識別された場所のセットに基づいて、かつ骨盤寛骨臼についての判定された回転中心に基づいて、患者の前骨盤平面(anterior pelvic plane、APP)及び/又は機能的骨盤平面(functional pelvic plane、FPP)の配向を判定する。
【0010】
本開示のいくつかの他の対応する実施形態は、外科手術中にコンピュータ支援ナビゲーションのための動作を実行するために、少なくとも1つのプロセッサによって実行可能な命令を記憶する非一時的コンピュータ可読媒体を備える、コンピュータプログラム製品を対象とする。動作は、ナビゲートされる器具が患者の骨盤骨の表面上に定義された目印を触知している場所のセットを識別する。更なる動作は、ナビゲートされる器具が目印を触知している識別された場所のセットに基づいて、患者の骨盤寛骨臼についての回転中心を判定する。動作は、ナビゲートされる器具が目印を触知している識別された場所のセットに基づいて、かつ骨盤寛骨臼についての判定された回転中心に基づいて、患者の前骨盤平面(APP)及び/又は機能的骨盤平面(FPP)の配向を判定する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
健康器具
6か月前
個人
鼾防止用具
6か月前
個人
歯茎みが品
7か月前
個人
短下肢装具
1か月前
個人
白内障治療法
5か月前
個人
脈波測定方法
6か月前
個人
洗井間専家。
5か月前
個人
嚥下鍛錬装置
1か月前
個人
導電香
6か月前
個人
脈波測定方法
6か月前
個人
マッサージ機
6か月前
個人
前腕誘導装置
1か月前
個人
クリップ
7か月前
個人
アイマスク装置
1日前
個人
矯正椅子
3か月前
個人
ホバーアイロン
4か月前
個人
バッグ式オムツ
2か月前
個人
歯の修復用材料
2か月前
個人
片足歩行支援具
7か月前
個人
車椅子持ち上げ器
5か月前
個人
哺乳瓶冷まし容器
1か月前
個人
シャンプー
4か月前
三生医薬株式会社
錠剤
5か月前
個人
口内洗浄具
6か月前
個人
眼科診療車
7か月前
個人
湿布連続貼り機。
10日前
個人
歯の保護用シール
3か月前
個人
陣痛緩和具
1か月前
個人
性行為補助具
27日前
個人
避難困難者救出台車
7か月前
株式会社結心
手袋
5か月前
株式会社コーセー
美爪料
7か月前
株式会社八光
剥離吸引管
2か月前
株式会社コーセー
化粧料
7か月前
個人
服薬支援装置
5か月前
株式会社大野
骨壷
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ