TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122967
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018738
出願日
2024-02-09
発明の名称
クレーンの制御装置及びクレーン
出願人
株式会社神戸製鋼所
,
コベルコ建機株式会社
代理人
弁理士法人三協国際特許事務所
主分類
B66C
23/94 20060101AFI20250815BHJP(巻上装置;揚重装置;牽引装置)
要約
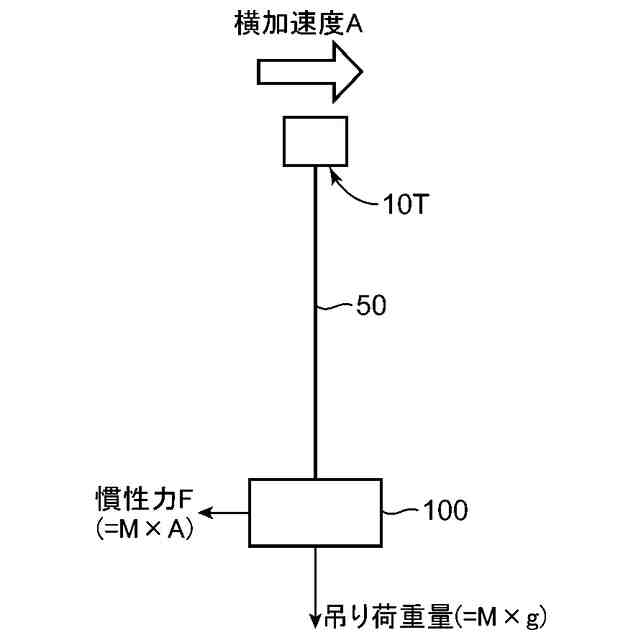
【課題】上部旋回体の加減速動作に際してアタッチメントの強度的な安全性の観点から旋回角加速度が必要以上に制限されてアタッチメントによる作業の迅速性が損なわれるのを防止可能なクレーンの制御装置を提供する。
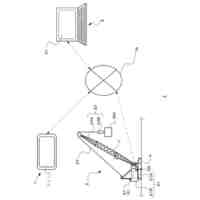
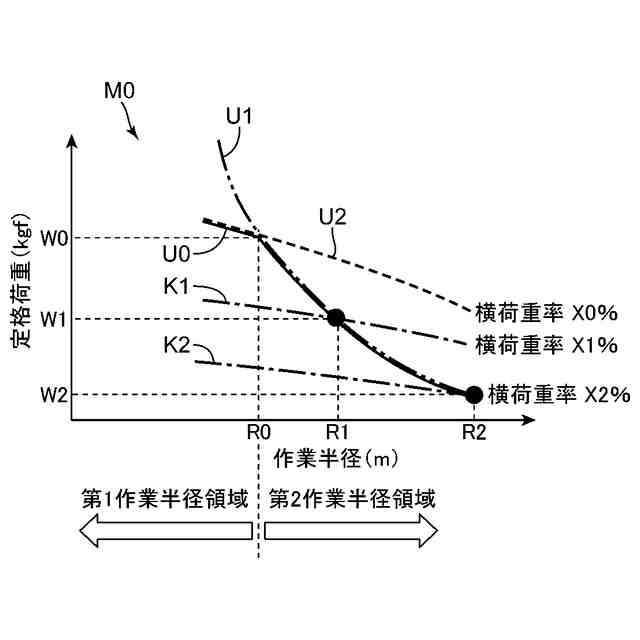
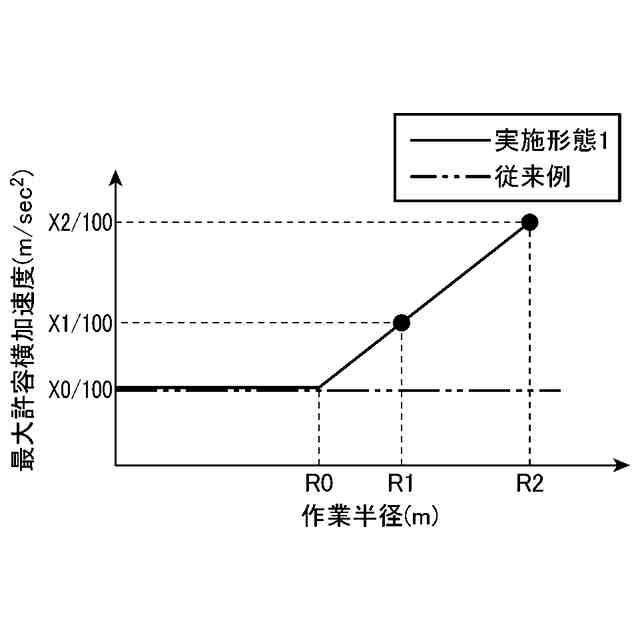
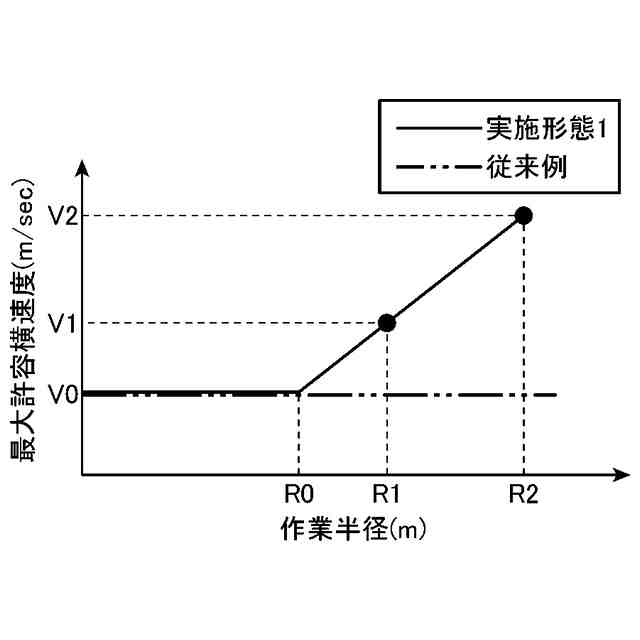
【解決手段】制御装置は、クレーンの吊り荷支持部の周方向の横加速度が最大許容横加速度以下になるとの所定加速度条件を満たすように旋回駆動部の駆動制御を実行する。最大許容横加速度は、強度許容重量が安定許容重量よりも小さくなる第1作業半径領域においては強度許容重量に対する吊り荷支持部の周方向の最大許容横荷重の比率に基づいて設定される一方、安定許容重量が強度許容重量よりも小さくなる第2作業半径領域においては安定許容重量に対する吊り荷支持部の周方向の最大許容横荷重の比率に基づいて設定される。
【選択図】図4
特許請求の範囲
【請求項1】
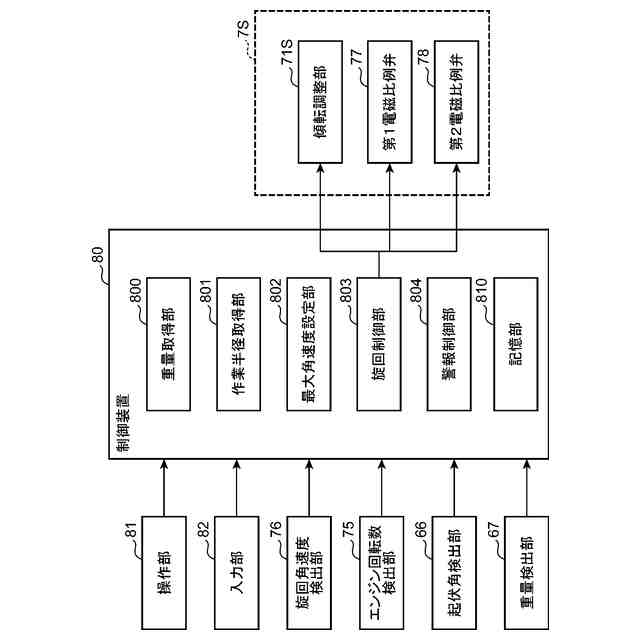
下部本体と、前記下部本体に対して上下方向に延びる旋回軸線回りに旋回可能なように前記下部本体に支持される上部旋回体と、鉛直に垂下される吊り荷ロープを介して吊り荷を支持する吊り荷支持部を有していて前記上部旋回体に連結されるアタッチメントと、前記上部旋回体を前記下部本体に対して前記旋回軸線回りに旋回させることが可能な旋回駆動部とを備えたクレーンに用いられるクレーンの制御装置であって、
前記旋回駆動部の駆動制御を実行する旋回制御部と、
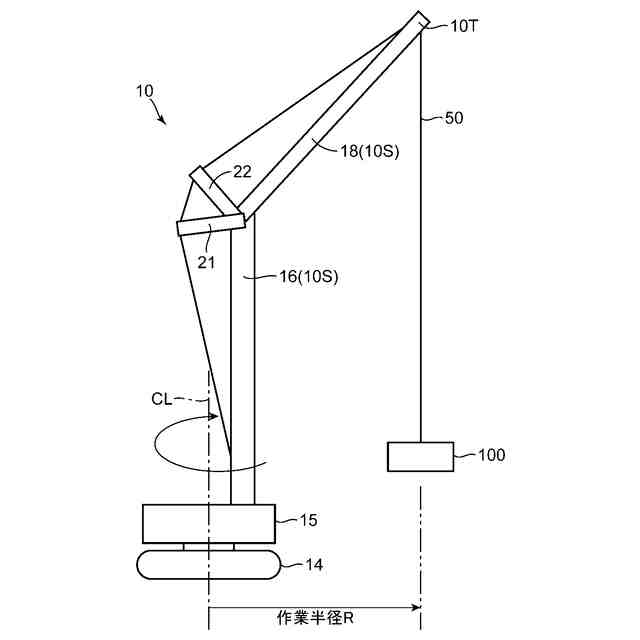
前記上部旋回体の旋回軸線と前記アタッチメントの前記吊り荷支持部との水平距離である作業半径を取得する作業半径取得部とを備え、
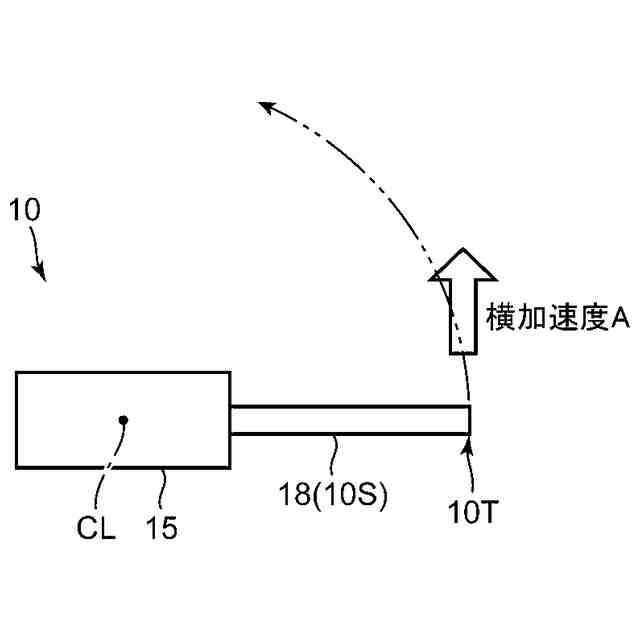
前記旋回制御部は、前記旋回駆動部により前記上部旋回体を前記旋回軸線回りに周方向に加速動作及び減速動作させる際には、前記吊り荷支持部の前記周方向の横加速度がその最大許容値であって前記作業半径に応じて定まる最大許容横加速度以下になるとの所定加速度条件を満たすように、前記旋回駆動部の駆動制御を実行するよう構成され、
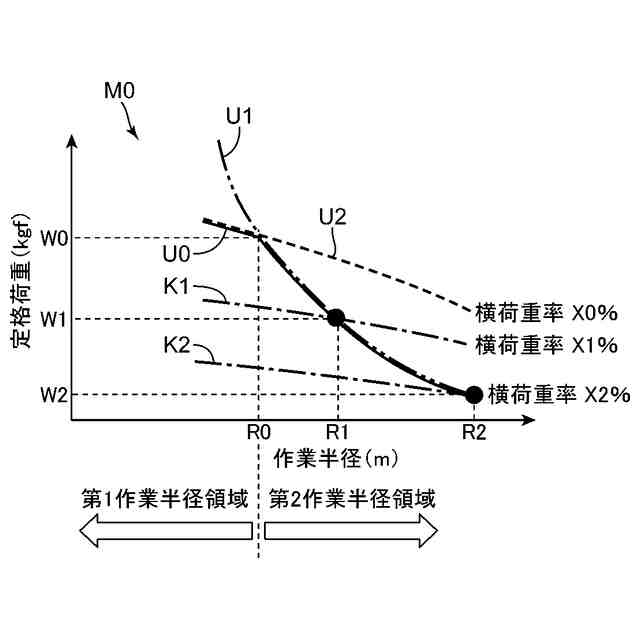
前記最大許容横加速度は、前記アタッチメントの強度限界に基づいて設定される前記吊り荷の最大許容重量である強度許容重量と前記アタッチメントの姿勢安定限界に基づいて設定される前記吊り荷の最大許容重量である安定許容重量とが等しくなる所定作業半径よりも小さい作業半径の領域であって前記強度許容重量が前記安定許容重量よりも小さくなる第1作業半径領域においては前記強度許容重量に対する前記吊り荷支持部の周方向の最大許容横荷重の比率に基づいて設定される一方、前記所定作業半径よりも大きい作業半径の領域であって前記安定許容重量が前記強度許容重量よりも小さくなる第2作業半径領域においては前記安定許容重量に対する前記吊り荷支持部の周方向の最大許容横荷重の比率に基づいて設定される、クレーンの制御装置。
続きを表示(約 2,900 文字)
【請求項2】
請求項1記載のクレーンの制御装置において、
前記旋回制御部は、前記作業半径取得部により取得された作業半径が前記第2作業半径領域にある場合には、該作業半径が大きいほど、前記旋回駆動部によって前記上部旋回体を前記周方向に加速動作及び減速動作させる際の各動作の動作開始時から動作終了時までの時間である収束時間を低減するように前記旋回駆動部の駆動制御を実行する、クレーンの制御装置。
【請求項3】
請求項1又は2記載のクレーンの制御装置において、
前記クレーンは、前記上部旋回体を旋回させるための操作を受け付けるとともにその操作信号を出力する操作部を有しており、
前記旋回制御部は、前記操作部からの操作信号を基に当該操作部が操作されたことを検知したときにはその操作量に応じた旋回角速度まで前記上部旋回体を加速動作させるとともに当該操作が解除されたときには前記上部旋回体を旋回停止に至るまで減速動作させるよう前記旋回駆動部の駆動制御を実行するようになっていて、前記操作部に対してフル操作よりも操作量が小さい非フル操作が実行された場合には、前記フル操作が実行された場合と比べて、前記加速動作及び減速動作の少なくとも一方の動作の実行に際して前記上部旋回体の旋回角加速度が変化しないように当該動作の動作開始時から動作終了時までの時間である収束時間を低減するように構成されている、クレーンの制御装置。
【請求項4】
請求項1又は2記載のクレーンの制御装置において、
前記吊り荷の重量を取得する重量取得部と、
前記吊り荷の定格荷重を記憶する記憶部とをさらに備え、
前記吊り荷の定格荷重は、前記第1作業半径領域では前記強度許容重量に一致し且つ前記第2作業半径領域では前記安定許容重量に一致するように前記作業半径に応じて予め設定されており、
前記所定加速度条件に規定される前記最大許容横加速度は、前記吊り荷の重量が前記定格荷重よりも小さい場合には、前記吊り荷の重量が前記定格荷重に等しい場合と比べて、前記吊り荷の重量と前記定格荷重との比率分だけ高くなるように設定されており、
前記旋回駆動部は、前記作業半径取得部により取得された作業半径を基に、当該作業半径に対応する前記吊り荷の定格荷重を取得し、該取得した定格荷重と、前記重量取得部により取得された吊り荷の重量との比率を基に、前記所定加速度条件を満たすように前記旋回駆動部の駆動制御を実行するように構成されている、クレーンの制御装置。
【請求項5】
請求項1又は2記載のクレーンの制御装置において、
前記上部旋回体及び前記アタッチメント及び前記吊り荷を含む旋回物群の前記旋回軸線回りの慣性モーメントを取得する慣性モーメント取得部をさらに備え、
前記旋回制御部は、前記慣性モーメント取得部により取得された慣性モーメントと前記旋回駆動部が出力可能な前記旋回軸線回りの最大出力トルクとを基に決まる前記旋回物群の前記周方向の角加速度の上限値である限界角加速度が、前記最大許容横加速度と前記作業半径とに基づいて決まる最大許容角加速度よりも小さい場合には、前記上部旋回体の旋回角加速度が前記限界角加速度以下になるように前記旋回駆動部の駆動制御を実行する一方、前記限界角加速度が前記最大許容角加速度以上である場合には、前記上部旋回体の旋回角加速度が前記最大許容角加速度以下になるように前記旋回駆動部の駆動制御を実行するように構成されている、クレーンの制御装置。
【請求項6】
請求項1又は2記載のクレーンの制御装置において、
前記旋回制御部は、前記上部旋回体を前記周方向に減速動作させる際には、
前記所定加速度条件を満たす最大許容角加速度で前記上部旋回体を前記減速動作させた場合の当該減速動作の動作開始時から動作終了時までの収束時間を目標収束時間として算出する第1算出処理と、
現時点における前記上部旋回体の周方向の旋回角度をθsとし、現時点における前記上部旋回体の旋回角速度をωsとしたとき、現時点から減速動作を開始して前記上部旋回体を所定の目標旋回角度θtで停止させるための前記収束時間を予測収束時間Tdとして式(1)により算出する第2算出処理とを実行して、
前記予測収束時間Tdが前記目標収束時間に一致したときに前記上部旋回体の減速動作を開始させるように前記旋回駆動部の駆動制御を実行する、クレーンの制御装置。
Td=2×(θt-θs)/ωs……………式(1)
【請求項7】
請求項1又は2記載のクレーンの制御装置において、
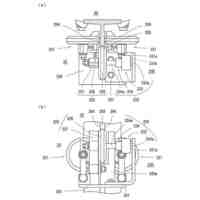
前記旋回駆動部は、
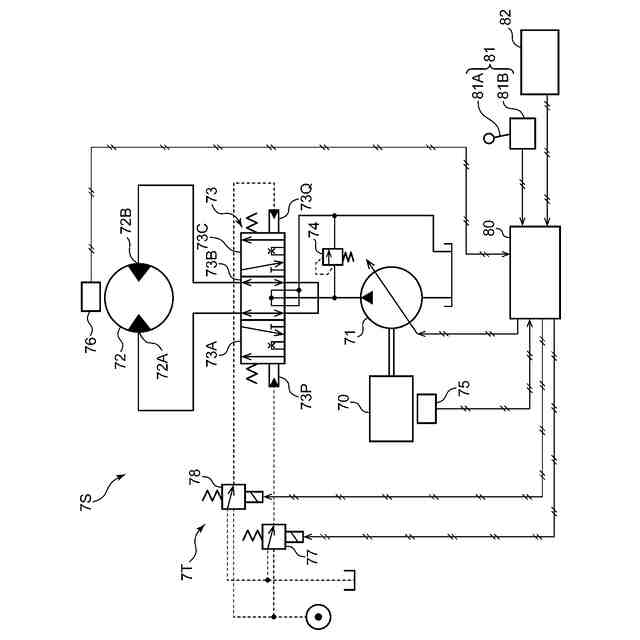
可変容量式の油圧モータと、
前記油圧モータに作動油を吐出する油圧ポンプと、
前記油圧ポンプと前記油圧モータとを接続する油圧回路と、
前記油圧回路に設けられ、前記油圧ポンプから前記油圧モータへの作動油の流入流量を制御する制御弁とを有し、
前記旋回制御部は、前記制御弁の開度の制御と、前記油圧ポンプの容量の制御と、前記油圧回路の油圧の制御とのうち少なくとも1つを実行することにより前記油圧モータの駆動制御を実行する、クレーンの制御装置。
【請求項8】
請求項1又は2記載のクレーンの制御装置において、
前記上部旋回体の旋回中にオペレータによる所定操作を受けた場合に当該上部旋回体を緊急停止させるための緊急停止信号を出力する緊急停止操作部とをさらに備え、
前記旋回駆動部は、
可変容量式の油圧モータと、
前記油圧モータに作動油を吐出する油圧ポンプと、
前記油圧ポンプと前記油圧モータとを接続する油圧回路と、
前記油圧回路に設けられ、前記油圧ポンプから前記油圧モータへの作動油の流入流量を制御する制御弁と、
前記油圧ポンプを駆動するエンジンとを有し、
前記旋回制御部は、前記上部旋回体の旋回中に前記緊急停止操作部より前記緊急停止信号を受信した場合には、当該旋回駆動部を停止させるべく、前記エンジンを停止させるとともに、前記所定加速度条件を満たす前記最大許容角加速度で前記上部旋回体を減速動作させた場合の当該減速動作の動作開始時から動作終了時までの収束時間を設定し、設定した収束時間にて前記制御弁を開状態から閉状態に遷移させるように前記旋回駆動部の駆動制御を実行する、クレーンの制御装置。
【請求項9】
下部本体と、
前記下部本体に対して上下方向に延びる旋回軸線回りに旋回可能なように前記下部本体に支持される上部旋回体と、
鉛直に垂下される吊り荷ロープを介して吊り荷を支持する吊り荷支持部を有していて前記上部旋回体に連結されるアタッチメントと、
前記上部旋回体を前記下部本体に対して前記旋回軸線回りに旋回させることが可能な旋回駆動部と、
前記請求項1又は2記載の制御装置とを備えたクレーン。
発明の詳細な説明
【技術分野】
【0001】
本発明は、クレーンの制御装置及びクレーンに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
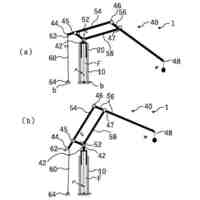
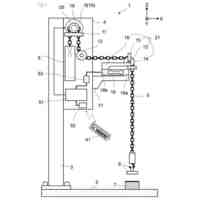
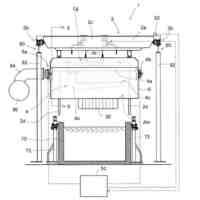
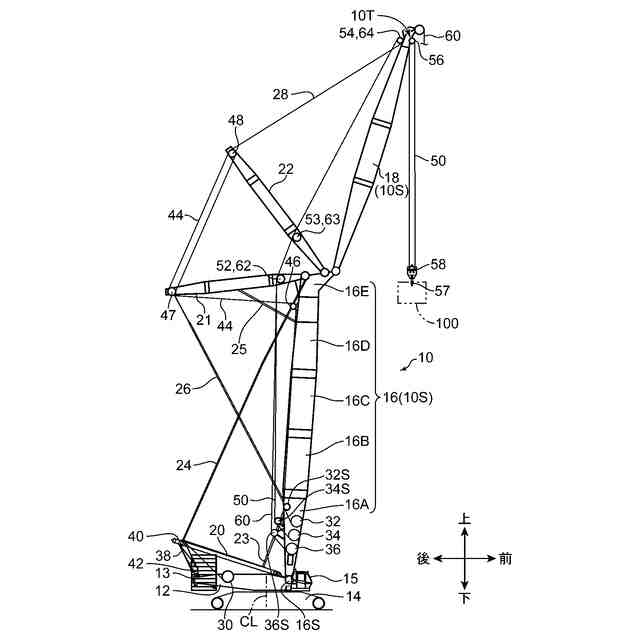
従来、下部本体に対して旋回可能に支持された上部旋回体と、上部旋回体に設置されるブームやジブなどのアタッチメントと、上部旋回体を旋回駆動する旋回駆動部とを有するクレーンが知られている。
【0003】
下記特許文献1には、この種のクレーンの制御に使用される制御装置が開示されている。この制御装置は、ブームの耐旋回トルクに対応する上部旋回体の許容角加速度を導出し、上部旋回体の実際の旋回角加速度を前記導出した許容角加速度の範囲内に制限するように旋回駆動部を制御する(特許文献1の段落[0096]-段落[0111]等参照)。制御装置は、旋回半径(ブームの起伏角に対応する半径)に応じて変化するブームの慣性モーメントと吊荷の慣性モーメントとの合計値と許容角加速度とを乗算することにより得られるトルクが前記耐旋回トルクに一致するように前記許容角加速度を算出する。
【先行技術文献】
【特許文献】
【0004】
特開2022-079903号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に示すクレーンの制御装置では、ブーム(アタッチメント)の耐旋回トルクに対応する許容角加速度を設定することでアタッチメントの強度的な安全性を確保することができる。しかしながら、この制御装置では、作業半径に応じて変化するクレーンの最大許容重量(定格荷重)の影響が全く考慮されていない。このため、作業半径によっては、上部旋回体の加減速動作時の旋回角加速度が吊り荷の重量とは無関係に必要以上に制限され、結果としてアタッチメントによる作業の迅速性が低下するという問題がある。
【0006】
本発明は、上記のような課題を解決するためになされたものであり、上部旋回体の加減速動作に際してアタッチメントの強度的な安全性の観点から旋回角加速度が必要以上に制限されてアタッチメントによる作業の迅速性が損なわれるのを防止することを目的とする。
【課題を解決するための手段】
【0007】
第1の発明は、下部本体と、前記下部本体に対して上下方向に延びる旋回軸線回りに旋回可能なように前記下部本体に支持される上部旋回体と、鉛直に垂下される吊り荷ロープを介して吊り荷を支持する吊り荷支持部を有していて前記上部旋回体に連結されるアタッチメントと、前記上部旋回体を前記下部本体に対して前記旋回軸線回りに旋回させることが可能な旋回駆動部とを備えたクレーンに用いられるクレーンの制御装置であって、前記旋回駆動部の駆動制御を実行する旋回制御部と、前記上部旋回体の旋回軸線と前記アタッチメントの前記吊り荷支持部との水平距離である作業半径を取得する作業半径取得部とを備え、前記旋回制御部は、前記旋回駆動部により前記上部旋回体を前記旋回軸線回りに周方向に加速動作及び減速動作させる際には、前記吊り荷支持部の前記周方向の横加速度がその最大許容値であって前記作業半径に応じて定まる最大許容横加速度以下になるとの所定加速度条件を満たすように、前記旋回駆動部の駆動制御を実行するよう構成され、前記最大許容横加速度は、前記アタッチメントの強度限界に基づいて設定される前記吊り荷の最大許容重量である強度許容重量と前記アタッチメントの姿勢安定限界に基づいて設定される前記吊り荷の最大許容重量である安定許容重量とが等しくなる所定作業半径よりも小さい作業半径の領域であって前記強度許容重量が前記安定許容重量よりも小さくなる第1作業半径領域においては前記強度許容重量に対する前記吊り荷支持部の周方向の最大許容横荷重の比率に基づいて設定される一方、前記所定作業半径よりも大きい作業半径の領域であって前記安定許容重量が前記強度許容重量よりも小さくなる第2作業半径領域においては前記安定許容重量に対する前記吊り荷支持部の周方向の最大許容横荷重の比率に基づいて設定される。
【0008】
この構成によれば、旋回駆動部により旋回駆動される上部旋回体の旋回角加速度が必要以上に制限されてアタッチメントによる作業の迅速性が損なわれるのを防止することができる。すなわち、本構成によれば、上部旋回体の周方向の減速動作及び加速動作に際して、吊り荷支持部に作用する周方向の横加速度が最大許容横加速度以下になるように旋回駆動部により上部旋回体が駆動される。この吊り荷支持部の最大許容横加速度は、吊り荷の強度許容重量が安定許容重量よりも小さくなる第1作業半径領域(吊り荷の定格荷重が強度許容重量によって制限される半径領域)では、当該強度許容重量に対する吊り荷支持部の周方向の最大許容横荷重の比率に基づいて設定され、安定許容重量が強度許容重量よりも小さくなる第2作業半径領域(吊り荷の定格荷重が安定許容重量によって制限される半径領域)では、当該安定許容重量に対する吊り荷支持部の周方向の最大許容横荷重の比率に基づいて設定される。したがって、各作業半径領域のいずれにおいても、吊り荷の重量を制限する強度許容重量と安定許容重量とのうち小さい方の重量に対する最大許容横荷重の比率(許容横荷重率)を基に吊り荷支持部の最大許容横加速度が設定されるので、例えば強度許容重量と安定許容重量とのうち大きい方の重量に対する前記最大許容横荷重の比率(許容横荷重率)を基に最大許容横加速度が設定される場合に比べて、基準となる吊り荷の最大重量が軽い分、吊り荷支持部の最大許容横加速度を増加させることができる。吊り荷支持部の最大許容横加速度が増加すると、上部旋回体の加速動作及び減速動作に際して上部旋回体の最大許容角加速度をその分だけ大きくとることができるので、旋回駆動部による上部旋回体の旋回角加速度が不必要に低下するのを防止することができる。延いては、アタッチメントによる作業の迅速性が損なわれるのを防止することができる。
【0009】
第2の発明は、第1の発明において、前記旋回制御部は、前記作業半径取得部により取得された作業半径が前記第2作業半径領域にある場合には、作業半径が大きいほど、前記旋回駆動部に前記加速動作及び減速動作を実行させる際の各動作の動作開始時から動作終了時までの時間である収束時間を低減するように前記旋回駆動部の駆動制御を実行することが好ましい。
【0010】
この構成によれば、所定加速度条件を満たすように上部旋回体を加速動作及び減速動作させた場合に(第1の発明の構成を採用した場合に)、第2作業半径領域において上部旋回体の旋回角加速度が従来に比べて増加することで生じる前記吊り荷支持部の加減動作中の移動距離の増加(減速動作の場合には制動距離の増加)を抑制することができる。すなわち、上部旋回体の加減速動作の収束時間を一定に維持しまま旋回角加速度を増加させたとすると、加減速動作時の吊り荷物支持部の移動距離は増加する。この移動距離の増加量は作業半径に比例して増加するが、本構成によれば、第2作業半径領域においては作業半径が大きいほど加減速動作の収束時間を低減することによってこの移動距離の増加を抑制することができる。よって、上部旋回体の加減速動作に際してのアタッチメントの位置決め性能を向上させることができる。特に、減速動作においては、アタッチメントの吊り荷物支持部の制動距離(移動距離)が低減されることによってアタッチメント(吊り荷)の停止位置精度を向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社神戸製鋼所
冷却システム
1日前
株式会社神戸製鋼所
冷却システム
1日前
株式会社神戸製鋼所
磁気ディスク用アルミニウム合金板、磁気ディスク用アルミニウム合金ブランク、及び磁気ディスク用アルミニウム合金サブストレート
1日前
株式会社神戸製鋼所
磁気ディスク用アルミニウム合金板、磁気ディスク用アルミニウム合金ブランク、及び磁気ディスク用アルミニウム合金サブストレート
1日前
個人
自走手摺
1か月前
個人
懸吊装置
11か月前
ユニパルス株式会社
吊具
2か月前
個人
海上コンテナ昇降装置
8か月前
ユニパルス株式会社
荷役装置
7か月前
ユニパルス株式会社
吊具装置
9か月前
水戸工業株式会社
吊り具
4か月前
株式会社豊田自動織機
荷役車両
7か月前
株式会社いうら
車椅子用昇降機
1か月前
ユニパルス株式会社
リフト装置
3か月前
株式会社豊田自動織機
産業車両
9か月前
株式会社豊田自動織機
荷役車両
8か月前
白山工業株式会社
バランサ
5か月前
ユニパルス株式会社
荷役助力装置
4か月前
愛知製鋼株式会社
受け架台
8日前
株式会社大林組
安全支援システム
1日前
株式会社伊藤
滑り止め装置
26日前
大栄産業株式会社
クランプ
3か月前
ユニパルス株式会社
荷役助力装置
2か月前
ユニパルス株式会社
荷役助力装置
1か月前
株式会社キトー
タイヤ用吊具
4か月前
株式会社ユピテル
システム等
4か月前
個人
建築部材の吊り上げ装置
10か月前
新英運輸株式会社
自動車用台車
4か月前
大和ハウス工業株式会社
吊上具
17日前
株式会社豊田自動織機
フォークリフト
6か月前
株式会社五十鈴製作所
搬送装置
2か月前
フジテック株式会社
エレベータ
7か月前
株式会社大林組
養生方法
11か月前
株式会社タダノ
高所作業車
10か月前
有限会社サエキ
玉掛用器具
8か月前
フジテック株式会社
エスカレータ
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ