TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133415
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024031358
出願日
2024-03-01
発明の名称
障害物検知システムおよび障害物検知方法
出願人
株式会社三井E&S
代理人
清流国際弁理士法人
,
個人
,
個人
主分類
B66C
23/88 20060101AFI20250904BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】障害物検知の精度を向上した障害物検知システムおよび障害物検知方法を提供する。
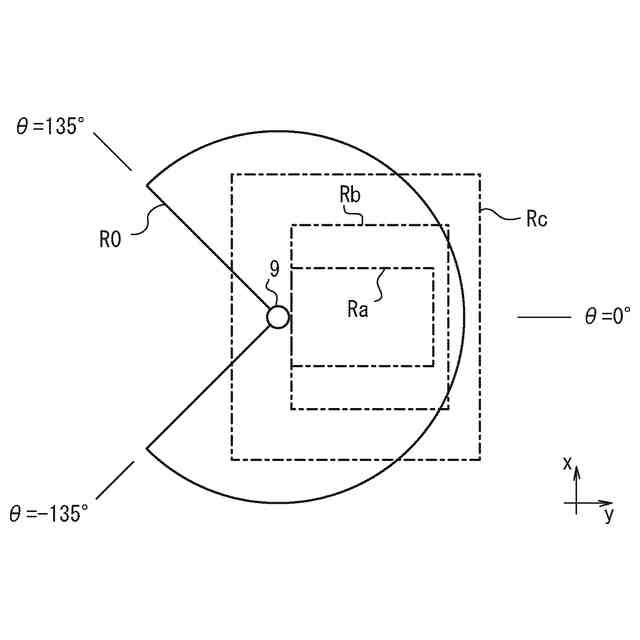
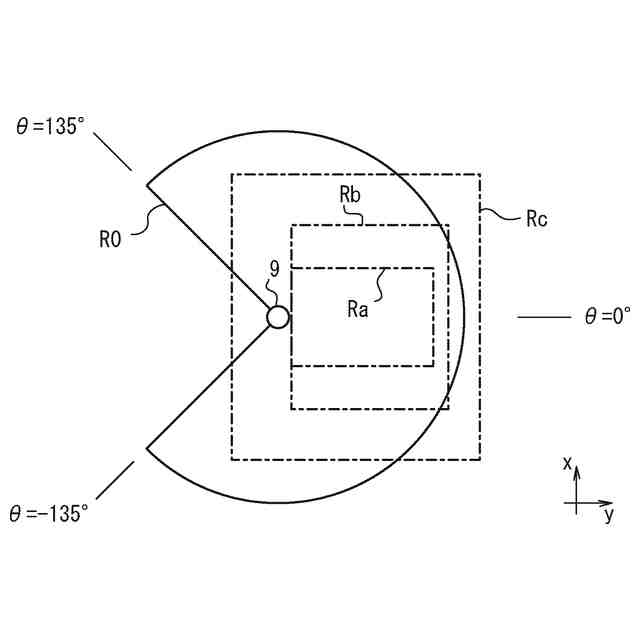
【解決手段】障害物がない場合にレーザ光が反射される反射地点の領域を検知領域として予め設定する検知領域設定ステップと、検知領域の内側で反射する反射光に応じて障害物の有無を判定する判定ステップとを備えた障害物検知方法において、検知領域設定ステップは、移動体の走行方向yの前方側に形成される前方検知領域Raと、この前方検知領域Raの周囲を囲む状態で形成される第一の周辺検知領域Rbと、この第一の周辺検知領域Rbの周囲を囲む状態で形成される第二の周辺検知領域Rcとを予め設定する。
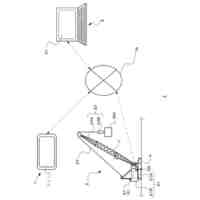
【選択図】図2
特許請求の範囲
【請求項1】
移動体に設置されて水平方向および上下方向に照射角度を変化させながらレーザ光を照射する発信部と、前記レーザ光の反射光を受光する受信部と、障害物がない場合に前記レーザ光が反射される反射地点の領域に検知領域を予め設定する検知領域設定機構と、前記検知領域の内側で反射する前記反射光に応じて障害物の有無を判定する判定機構とを備える障害物検知システムにおいて、
前記検知領域設定機構は、前記移動体の走行方向の前方側に形成される前方検知領域と、この前方検知領域の周囲を囲む状態で形成される第一の周辺検知領域と、この第一の周辺検知領域の周囲を囲む状態で形成される第二の周辺検知領域とを設定する構成を有することを特徴とする障害物検知システム。
続きを表示(約 1,300 文字)
【請求項2】
前記判定機構は、前記第一の周辺検知領域で障害物ありと判定された後に、前記第一の周辺検知領域で障害物なしと判定されて且つ前記第二の周辺検知領域で障害物ありと判定される状態を経ることなく、前記前方検知領域および前記第一の周辺検知領域および前記第二の周辺検知領域のいずれにおいても障害物なしと判定された場合に、前記前方検知領域の死角となる死角領域に障害物があると判定する構成を有する請求項1に記載の障害物検知システム。
【請求項3】
前記判定機構の判定結果に応じて前記移動体に指令を送信する指令機構を備えていて、
前記指令機構は、前記死角領域または前記前方検知領域に障害物ありと前記判定機構が判定した場合に前記移動体に指令を送信する構成を有する請求項2に記載の障害物検知システム。
【請求項4】
前記第一の周辺検知領域または前記第二の周辺検知領域の少なくとも一方は、二つ以上の検知領域に分割されていて、
前記判定機構は、複数の前記検知領域ごとに障害物の有無を判定する構成を有する請求項1~3のいずれかに記載の障害物検知システム。
【請求項5】
移動体に設置される発信部から水平方向および上下方向に照射角度を変化させながらレーザ光を照射して、このレーザ光の反射光を受信部で受光して障害物の有無を検知する障害物検知方法であり、障害物がない場合に前記レーザ光が反射される反射地点の領域を検知領域として予め設定する検知領域設定ステップと、前記検知領域の内側で反射する前記反射光に応じて障害物の有無を判定する判定ステップとを備えた障害物検知方法において、
前記検知領域設定ステップは、前記移動体の走行方向の前方側に形成される前方検知領域と、この前方検知領域の周囲を囲む状態で形成される第一の周辺検知領域と、この第一の周辺検知領域の周囲を囲む状態で形成される第二の周辺検知領域とを予め設定する構成を有することを特徴とする障害物検知方法。
【請求項6】
前記判定ステップは、前記第一の周辺検知領域で障害物ありと判定された後に、前記第一の周辺検知領域で障害物なしと判定されて且つ前記第二の周辺検知領域で障害物ありと判定される状態を経ることなく、前記前方検知領域および前記第一の周辺検知領域および前記第二の周辺検知領域のいずれにおいても障害物なしと判定された場合に、前記前方検知領域の死角となる死角領域に障害物があると判定する構成を有する請求項5に記載の障害物検知方法。
【請求項7】
前記判定ステップの判定結果に応じて前記移動体に指令を送信する指令ステップを備えていて、
前記指令ステップは、前記死角領域または前記前方検知領域に障害物ありと判定された場合に前記移動体に指令を送信する構成を有する請求項6に記載の障害物検知方法。
【請求項8】
前記第一の周辺検知領域または前記第二の周辺検知領域の少なくとも一方は、二つ以上の検知領域に分割されていて、
前記判定ステップは、複数の前記検知領域ごとに障害物の有無を判定する構成を有する請求項5~7のいずれかに記載の障害物検知方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば走行路を走行する車両等の移動体に設置されていて移動体の周囲における障害物の有無を検知する障害物検知システムおよび障害物検知方法に関し、詳しくは障害物検知の精度を向上した障害物検知システムおよび障害物検知方法に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
クレーンの走行時に障害物を検知するための障害物検知システムが種々提案されている(例えば特許文献1参照)。特許文献1に記載の障害物検知システムは、クレーンの走行方向に沿ってレーザ光を走査することで、障害物を検知できる。
【0003】
クレーンの走行における安全性を向上するために、障害物を検知する検知領域を拡大することが考えられる。例えばLiDAR(Light Detection and ranging)や3Dレーザスキャナと呼ばれる機器により、クレーンの横行方向に検知領域を拡大できる。またLiDAR等をクレーンの比較的高い位置に設置することで、検知領域を走行方向および横行方向に拡大できる。
【0004】
しかしながらLiDAR等をクレーンの高所に設置した場合、クレーンの近傍であり走行路に近い位置にレーザ光の届かない死角が発生する可能性があった。死角の発生により、障害物検知の精度が低下するおそれがあった。
【先行技術文献】
【特許文献】
【0005】
日本国特開2018-105822号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は上記の問題を鑑みてなされたものであり、その目的は障害物検知の精度を向上した障害物検知システムおよび障害物検知方法を提供することである。
【課題を解決するための手段】
【0007】
上記の目的を達成するための障害物検知システムは、移動体に設置されて水平方向および上下方向に照射角度を変化させながらレーザ光を照射する発信部と、前記レーザ光の反射光を受光する受信部と、障害物がない場合に前記レーザ光が反射される反射地点の領域に検知領域を予め設定する検知領域設定機構と、前記検知領域の内側で反射する前記反射光に応じて障害物の有無を判定する判定機構とを備える障害物検知システムにおいて、前記検知領域設定機構は、前記移動体の走行方向の前方側に形成される前方検知領域と、この前方検知領域の周囲を囲む状態で形成される第一の周辺検知領域と、この第一の周辺検知領域の周囲を囲む状態で形成される第二の周辺検知領域とを設定する構成を有することを特徴とする。
【0008】
上記の目的を達成するための障害物検知方法は、移動体に設置される発信部から水平方向および上下方向に照射角度を変化させながらレーザ光を照射して、このレーザ光の反射光を受信部で受光して障害物の有無を検知する障害物検知方法であり、障害物がない場合に前記レーザ光が反射される反射地点の領域を検知領域として予め設定する検知領域設定ステップと、前記検知領域の内側で反射する前記反射光に応じて障害物の有無を判定する判定ステップとを備えた障害物検知方法において、前記検知領域設定ステップは、前記移動体の走行方向の前方側に形成される前方検知領域と、この前方検知領域の周囲を囲む状態で形成される第一の周辺検知領域と、この第一の周辺検知領域の周囲を囲む状態で形成される第二の周辺検知領域とを予め設定する構成を有することを特徴とする。
【発明の効果】
【0009】
本発明によれば、前方領域に形成される死角への障害物の侵入の有無を、死角の周囲に形成される第一の周辺検知領域および第二の周辺検知領域の状態から推定可能となる。障害物検知の精度を向上するには有利である。
【図面の簡単な説明】
【0010】
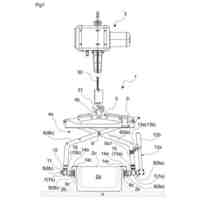
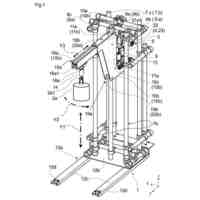
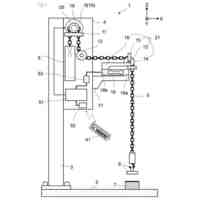
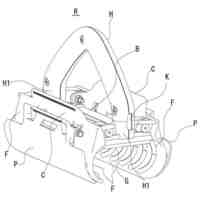
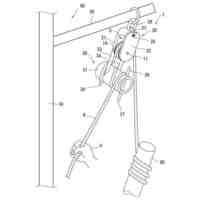
障害物検知システムの概略を例示する説明図である。
検知領域を平面視で例示する説明図である。
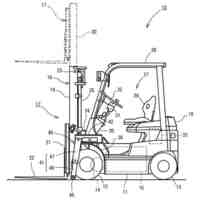
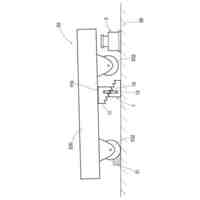
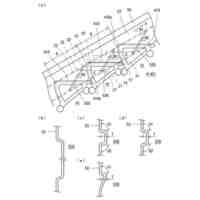
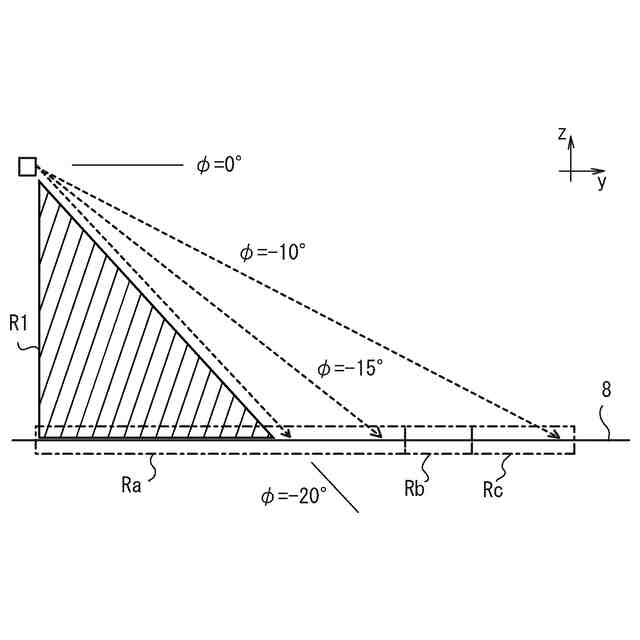
検知領域を側面視で例示する説明図である。
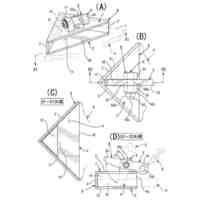
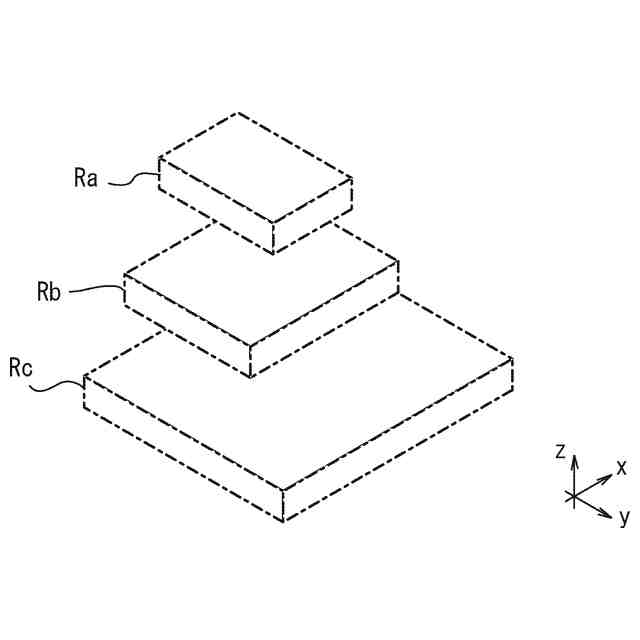
検知領域を上下方向に分解して例示する説明図である。
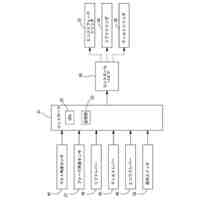
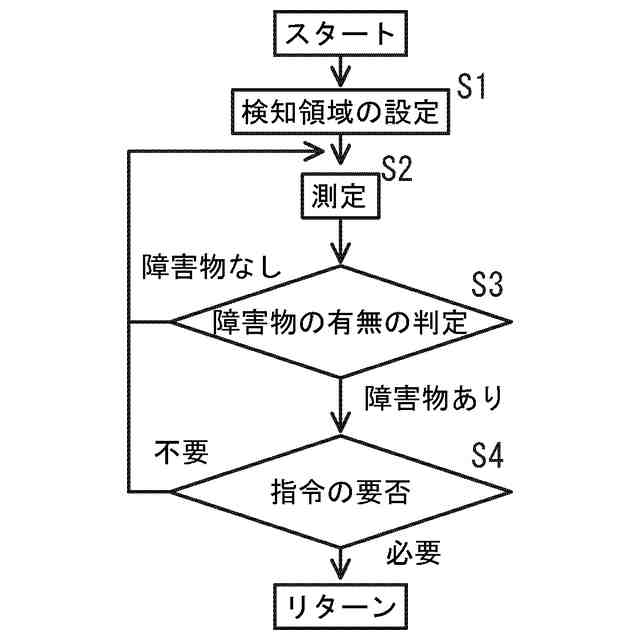
障害物検知システムの制御のフローを例示する説明図である。
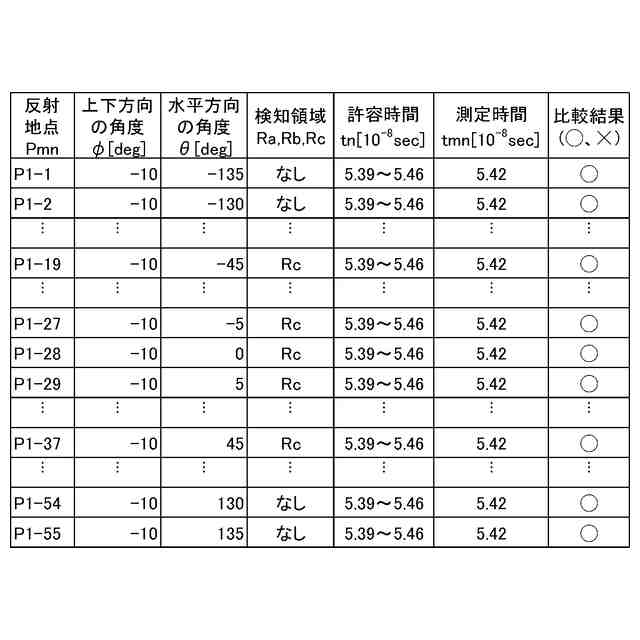
障害物検知システムが有するデータを例示する表である。
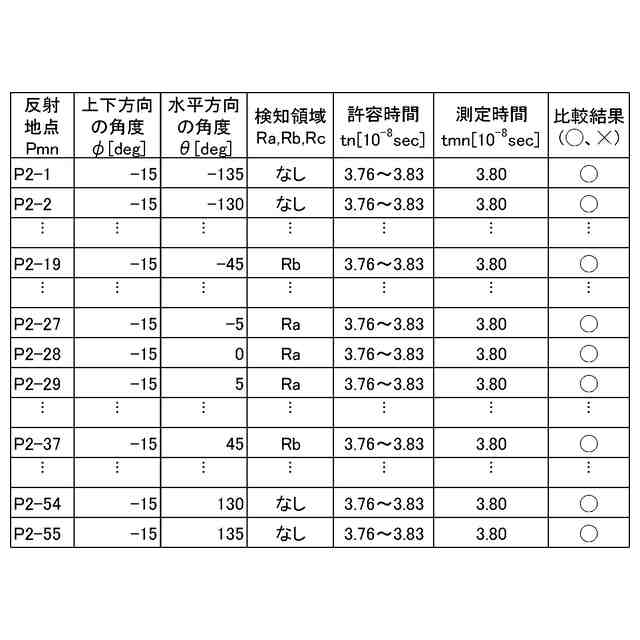
障害物検知システムが有するデータを例示する表である。
検知領域と反射地点Pmnの関係を例示する説明図である。
検知領域における判定結果の組み合わせを例示する説明図である。
図8の作業員が移動した状態を例示する説明図である。
図10の作業員が移動した状態を例示する説明図である。
状況Qnの移行のパターンを例示する説明図である。
図4の変形例を例示する説明図である。
検知領域における判定結果の組み合わせを例示する説明図である。
図10の変形例を例示する説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
自走手摺
2か月前
ユニパルス株式会社
吊具
3か月前
個人
海上コンテナ昇降装置
9か月前
ユニパルス株式会社
荷役装置
8か月前
ユニパルス株式会社
吊具装置
9か月前
株式会社豊田自動織機
荷役車両
7か月前
株式会社豊田自動織機
荷役車両
8か月前
株式会社豊田自動織機
産業車両
9か月前
ユニパルス株式会社
リフト装置
3か月前
水戸工業株式会社
吊り具
5か月前
株式会社いうら
車椅子用昇降機
1か月前
株式会社豊田自動織機
産業車両
4日前
愛知製鋼株式会社
受け架台
24日前
株式会社大林組
安全支援システム
17日前
ユニパルス株式会社
荷役助力装置
4か月前
大栄産業株式会社
クランプ
3か月前
ユニパルス株式会社
荷役助力装置
2か月前
白山工業株式会社
バランサ
5か月前
個人
垂直自動搬送機
5日前
ユニパルス株式会社
荷役助力装置
3か月前
株式会社伊藤
滑り止め装置
1か月前
個人
建築部材の吊り上げ装置
11か月前
株式会社ユピテル
システム等
5か月前
株式会社キトー
タイヤ用吊具
4か月前
新英運輸株式会社
自動車用台車
4か月前
株式会社豊田自動織機
フォークリフト
6か月前
株式会社大林組
養生方法
11か月前
大和ハウス工業株式会社
吊上具
1か月前
株式会社五十鈴製作所
搬送装置
3か月前
フジテック株式会社
エレベータ
8か月前
白山工業株式会社
腕重量補償機構
11か月前
株式会社タダノ
高所作業車
11か月前
有限会社サエキ
玉掛用器具
9か月前
山崎産業株式会社
手摺り拭用器具
6日前
フジテック株式会社
エスカレータ
5か月前
中坪造園有限会社
吊り荷降ろし具
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ