TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025134271
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032070
出願日
2024-03-04
発明の名称
走行制御システム
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
B66F
9/24 20060101AFI20250909BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】運搬車が規定停止位置からずれて停止していても、運搬車の荷台に対して荷役を行うことができる走行制御システムを提供する。
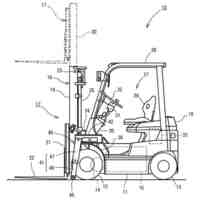
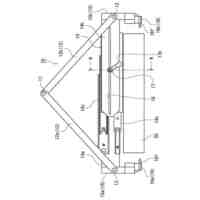
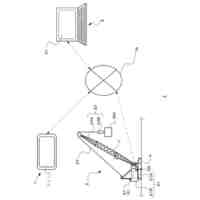
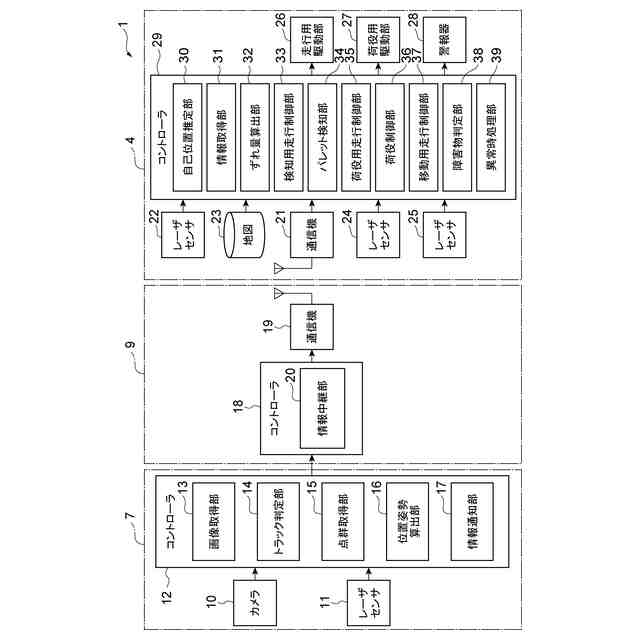
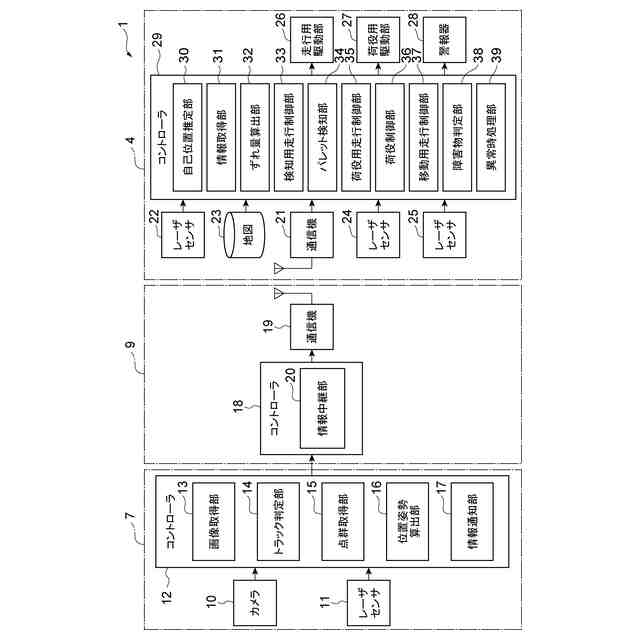
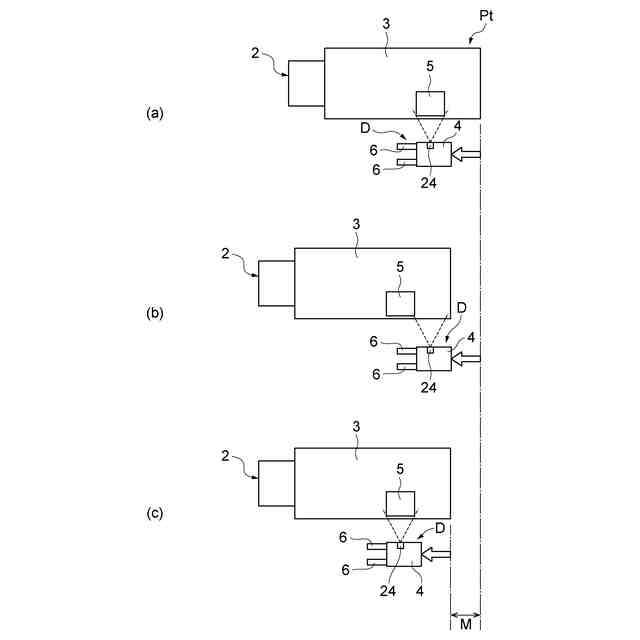
【解決手段】走行制御システム1は、トラック2の位置及び姿勢を検知するインフラ側検知装置7と、トラック2の位置及び姿勢に基づいて、トラック2の停止位置と規定停止位置とのずれ量を算出するずれ量算出部32と、トラック2の停止位置と規定停止位置とのずれ量に応じて、荷台3上において荷役が行われる荷役対象のパレット5の手前側に設定される検知位置までフォークリフト4を走行させるように制御する検知用走行制御部33と、フォークリフト4が検知位置に到達した後、荷役対象のパレット5の状態を検知するパレット検知部34と、荷役対象のパレット5の状態に基づいて、検知位置から荷役対象に対して荷役を行うことが可能な荷役位置までフォークリフト4を走行させるように制御する移動用走行制御部37とを備える。
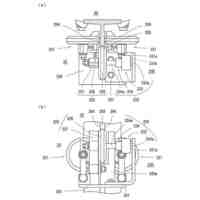
【選択図】図2
特許請求の範囲
【請求項1】
荷物を運搬する運搬車の荷台に対してフォークリフトにより荷役を行う際に、前記フォークリフトを走行させる走行制御システムであって、
前記運搬車が停車する停車領域の周辺に設置され前記運搬車を検出するセンサを有し、前記運搬車の位置及び姿勢を検知する運搬車検知部と、
前記運搬車検知部により検知された前記運搬車の位置及び姿勢に基づいて、前記運搬車の停止位置と予め定められた規定停止位置とのずれ量を算出する停止位置ずれ算出部と、
前記停止位置ずれ算出部により算出された前記運搬車の停止位置と前記規定停止位置とのずれ量に応じて、前記荷台上において荷役が行われる荷役対象の手前側に設定される検知位置まで前記フォークリフトを走行させるように制御する第1走行制御部と、
前記フォークリフトが前記検知位置に到達した後、前記荷役対象の状態を検知する荷役対象検知部と、
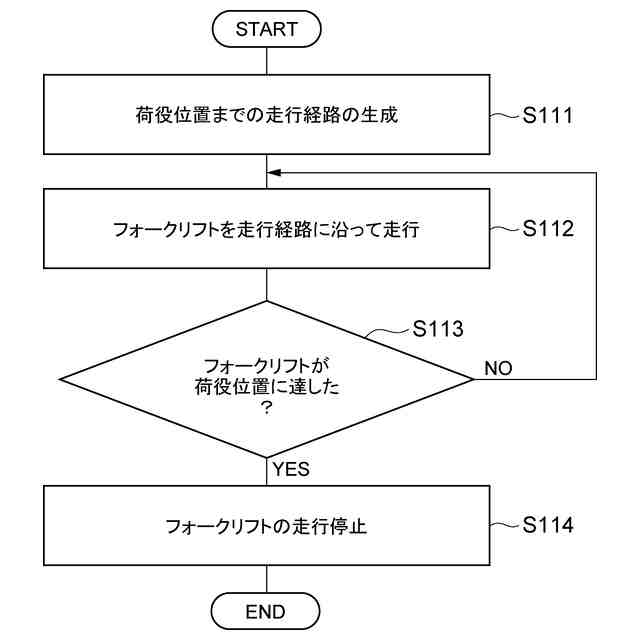
前記荷役対象検知部により検知された前記荷役対象の状態に基づいて、前記検知位置から前記荷役対象に対して荷役を行うことが可能な荷役位置まで前記フォークリフトを走行させるように制御する第2走行制御部とを備える走行制御システム。
続きを表示(約 900 文字)
【請求項2】
前記第1走行制御部は、前記運搬車の停止位置と前記規定停止位置とのずれ量の分だけ前記検知位置を前記規定停止位置に対して前記停止位置がずれた方向にオフセットし、オフセットされた検知位置まで前記フォークリフトを走行させるように制御する請求項1記載の走行制御システム。
【請求項3】
前記第1走行制御部は、前記運搬車の停止位置と前記規定停止位置とのずれ量の分だけ前記検知位置までの走行経路を前記規定停止位置に対して前記停止位置がずれた方向にオフセットし、オフセットされた走行経路に従って前記フォークリフトを走行させるように制御する請求項1記載の走行制御システム。
【請求項4】
前記停止位置ずれ算出部により算出された前記運搬車の停止位置と前記規定停止位置とのずれ量に応じて、前記運搬車の左右一方側から左右他方側まで前記フォークリフトを走行させるように制御する第3走行制御部を更に備える請求項1記載の走行制御システム。
【請求項5】
前記第3走行制御部は、前記運搬車の停止位置と前記規定停止位置とのずれ量の分だけ前記運搬車の左右一方側から左右他方側までの走行経路を前記規定停止位置に対して前記停止位置がずれた方向にオフセットし、オフセットされた走行経路に従って前記フォークリフトを走行させるように制御する請求項4記載の走行制御システム。
【請求項6】
前記フォークリフトの走行経路に設定された障害物検知エリアに障害物が存在するかどうかを検知する障害物検知部と、
前記フォークリフトの走行時に、前記障害物検知部により前記障害物検知エリアに前記障害物が存在することが検知されると、前記フォークリフトの走行を停止させるように前記フォークリフトを制御する異常時処理部とを更に備える請求項1記載の走行制御システム。
【請求項7】
前記停止位置ずれ算出部により算出された前記運搬車の停止位置と前記規定停止位置とのずれ量に応じて、前記障害物検知エリアを縮小する検知エリア補正部を更に備える請求項6記載の走行制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行制御システムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
例えば特許文献1には、走行制御装置が記載されている。特許文献1に記載の走行制御装置は、トラックの荷台に載置されたパレットの前面を撮像して画像データを取得するカメラと、パレットの前面までの距離を検出して点群データを取得するレーザセンサと、カメラの画像データ及びレーザセンサの点群データに基づいてパレットの前面を検知し、パレットの前面に基づいてフォークリフトに対するパレットの位置及び姿勢を算出し、パレットの位置及び姿勢に基づいて、フォークリフトのフォークがパレットのフォーク穴に差し込まれる目標位置までの走行経路を生成し、その走行経路に従ってフォークリフトを走行させるように走行モータを制御するコントローラとを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2023-56669号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記従来技術のようにトラック(運搬車)の荷台に載置されたパレットの位置及び姿勢を検知する場合は、フォークリフトに搭載されたカメラ及びレーザセンサによりパレットの検出が可能な規定停止位置にトラックが停止していることが前提となっている。このため、トラックの停止位置が規定停止位置からずれていると、トラックの荷台に載置されたパレットを検出することができず、結果としてトラックの荷台に対して荷役を行うことができない場合がある。このような問題を回避するためには、トラックを規定停止位置に停止させるように誘導を行う人員が必要となってくる。
【0005】
本発明の目的は、運搬車が規定停止位置からずれて停止していても、運搬車の荷台に対して荷役を行うことができる走行制御システムを提供することである。
【課題を解決するための手段】
【0006】
(1)本発明の一態様は、荷物を運搬する運搬車の荷台に対してフォークリフトにより荷役を行う際に、フォークリフトを走行させる走行制御システムであって、運搬車が停車する停車領域の周辺に設置され運搬車を検出するセンサを有し、運搬車の位置及び姿勢を検知する運搬車検知部と、運搬車検知部により検知された運搬車の位置及び姿勢に基づいて、運搬車の停止位置と予め定められた規定停止位置とのずれ量を算出する停止位置ずれ算出部と、停止位置ずれ算出部により算出された運搬車の停止位置と規定停止位置とのずれ量に応じて、荷台上において荷役が行われる荷役対象の手前側に設定される検知位置までフォークリフトを走行させるように制御する第1走行制御部と、フォークリフトが検知位置に到達した後、荷役対象の状態を検知する荷役対象検知部と、荷役対象検知部により検知された荷役対象の状態に基づいて、検知位置から荷役対象に対して荷役を行うことが可能な荷役位置までフォークリフトを走行させるように制御する第2走行制御部とを備える。
【0007】
このような走行制御システムにおいては、運搬車が停車する停車領域の周辺に設置されたセンサにより運搬車が検出され、運搬車の位置及び姿勢が検知される。そして、運搬車の位置及び姿勢に基づいて、運搬車の停止位置と予め定められた規定停止位置とのずれ量が算出される。そして、運搬車の停止位置と規定停止位置とのずれ量に応じて、荷台上において荷役が行われる荷役対象の手前側に設定される検知位置までフォークリフトが走行するように制御される。そして、フォークリフトが検知位置に到達した後、荷役対象の状態が検知される。そして、荷役対象の状態に基づいて、検知位置から荷役対象に対して荷役を行うことが可能な荷役位置までフォークリフトが走行するように制御される。このように運搬車の停止位置と規定停止位置とのずれ量に応じて、フォークリフトが検知位置まで走行する。このため、運搬車の停止位置が規定停止位置に対してずれていても、検知位置において荷役対象の状態が検知される。これにより、運搬車が規定停止位置からずれて停止していても、運搬車の荷台に対して荷役を行うことができる。
【0008】
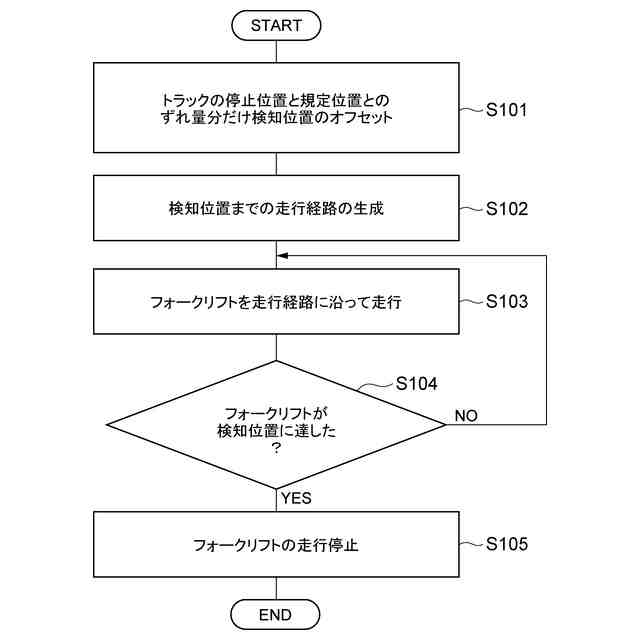
(2)上記の(1)において、第1走行制御部は、運搬車の停止位置と規定停止位置とのずれ量の分だけ検知位置を規定停止位置に対して停止位置がずれた方向にオフセットし、オフセットされた検知位置までフォークリフトを走行させるように制御してもよい。
【0009】
このような構成では、検知位置を運搬車の停止位置と規定停止位置とのずれ量の分だけ規定停止位置に対して停止位置がずれた方向にオフセットし、そのオフセットされた検知位置までフォークリフトを走行させることにより、運搬車の停止位置が規定停止位置に対してずれていても、フォークリフトが荷役対象の手前側に設定される検知位置に確実に到達する。
【0010】
(3)上記の(1)において、第1走行制御部は、運搬車の停止位置と規定停止位置とのずれ量の分だけ検知位置までの走行経路を規定停止位置に対して停止位置がずれた方向にオフセットし、オフセットされた走行経路に従ってフォークリフトを走行させるように制御してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
自走手摺
2か月前
ユニパルス株式会社
吊具
4か月前
個人
海上コンテナ昇降装置
10か月前
ユニパルス株式会社
吊具装置
10か月前
ユニパルス株式会社
荷役装置
9か月前
ユニパルス株式会社
リフト装置
4か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
産業車両
10か月前
株式会社豊田自動織機
産業車両
29日前
水戸工業株式会社
吊り具
6か月前
株式会社いうら
車椅子用昇降機
2か月前
株式会社豊田自動織機
荷役車両
8か月前
ユニパルス株式会社
荷役助力装置
5か月前
個人
エアバック式レスキュー用品
3日前
個人
垂直自動搬送機
1か月前
株式会社大林組
安全支援システム
1か月前
株式会社伊藤
滑り止め装置
2か月前
ユニパルス株式会社
荷役助力装置
3か月前
白山工業株式会社
バランサ
6か月前
大栄産業株式会社
クランプ
4か月前
愛知製鋼株式会社
受け架台
1か月前
ユニパルス株式会社
荷役助力装置
4か月前
株式会社ユピテル
システム等
6か月前
株式会社キトー
タイヤ用吊具
5か月前
新英運輸株式会社
自動車用台車
5か月前
株式会社豊田自動織機
フォークリフト
7か月前
大和ハウス工業株式会社
吊上具
1か月前
中国計量大学
電子安全クランプ
11日前
フジテック株式会社
エレベータ
8か月前
株式会社五十鈴製作所
搬送装置
4か月前
株式会社豊田自動織機
フォークリフト
22日前
中坪造園有限会社
吊り荷降ろし具
4か月前
フジテック株式会社
エスカレータ
6か月前
有限会社サエキ
玉掛用器具
9か月前
山崎産業株式会社
手摺り拭用器具
1か月前
株式会社スギヤス
車両整備用リフト
10か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ