TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025139694
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024038664
出願日
2024-03-13
発明の名称
操舵制御装置
出願人
株式会社ジェイテクト
代理人
個人
,
個人
主分類
B62D
6/00 20060101AFI20250919BHJP(鉄道以外の路面車両)
要約
【課題】ステアバイワイヤ方式の操舵装置を適切に検査することができる操舵制御装置を提供する。
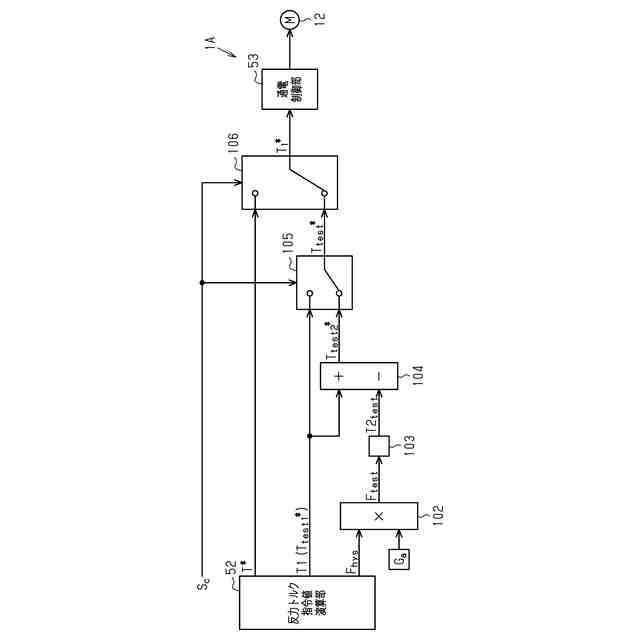
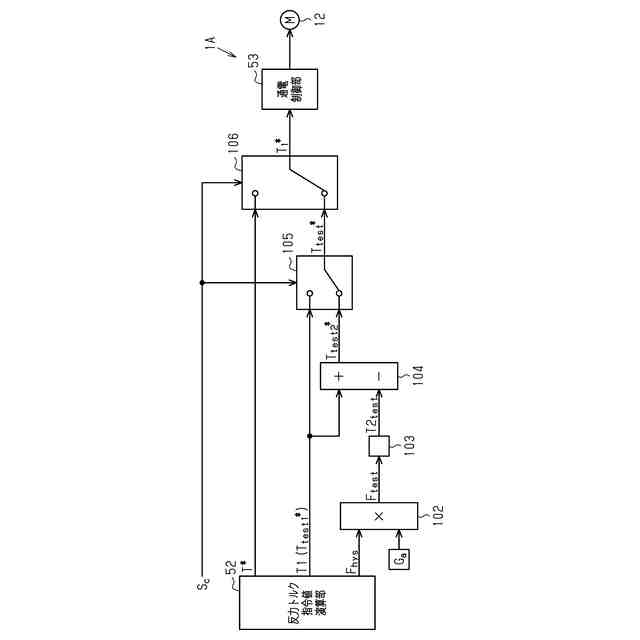
【解決手段】操舵制御装置は、車両の操舵装置を制御する。操舵装置は、反力モータを含む操舵機構を有する。操舵制御装置は、反力制御装置1Aを有する。反力制御装置1Aは、ステアリングホイールの操舵状態に応じて演算されるトルク指令値に基づいて反力モータを制御する。反力制御装置1Aは、反力モータを制御する制御モードとして、車両を走行させるための通常モードと、操舵機構の検査を行うための検査モードとを有する。反力制御装置1Aは、制御モードが通常モードである場合には、トルク指令値として車両の走行に適した走行用トルク指令値を演算する。走行用トルク指令値は、反力トルク指令値T
*
である。反力制御装置1Aは、制御モードが検査モードである場合には、トルク指令値として検査に適した最終検査用トルク指令値T
test
*
を演算する。
【選択図】図8
特許請求の範囲
【請求項1】
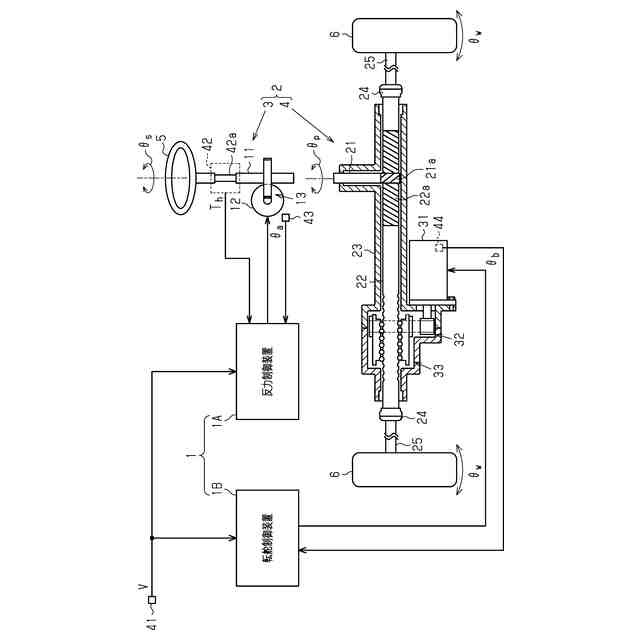
車両の転舵輪とステアリングホイールとの間の動力伝達が分離された操舵装置を制御するように構成され、前記操舵装置は、前記ステアリングホイールに加える操舵反力を発生するように構成される反力モータを含む操舵機構を有する操舵制御装置であって、
前記ステアリングホイールの操舵状態に応じて演算されるトルク指令値に基づいて前記反力モータを制御するように構成される反力制御部を有し、
前記反力制御部は、前記反力モータを制御する制御モードとして、前記車両を走行させるための通常モードと、前記操舵機構の検査を行うため検査モードとを有し、
前記反力制御部は、前記制御モードが前記通常モードである場合には、前記トルク指令値として前記車両の走行に適した走行用トルク指令値を演算し、
前記制御モードが前記検査モードである場合には、前記トルク指令値として前記検査に適した検査用トルク指令値を演算するように構成される操舵制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記検査は、第1の検査と第2の検査とを含み、
前記反力制御部は、前記第1の検査が行われる場合には、前記検査用トルク指令値として前記第1の検査に適した第1の検査用トルク指令値を演算し、
前記第2の検査が行われる場合には、前記検査用トルク指令値として前記第2の検査に適した第2の検査用トルク指令値を使用するように構成される請求項1に記載の操舵制御装置。
【請求項3】
前記検査は、前記操舵機構に通電して、前記操舵機構の作動性あるいは入出力特性を確認するための比例負荷検査を含み、
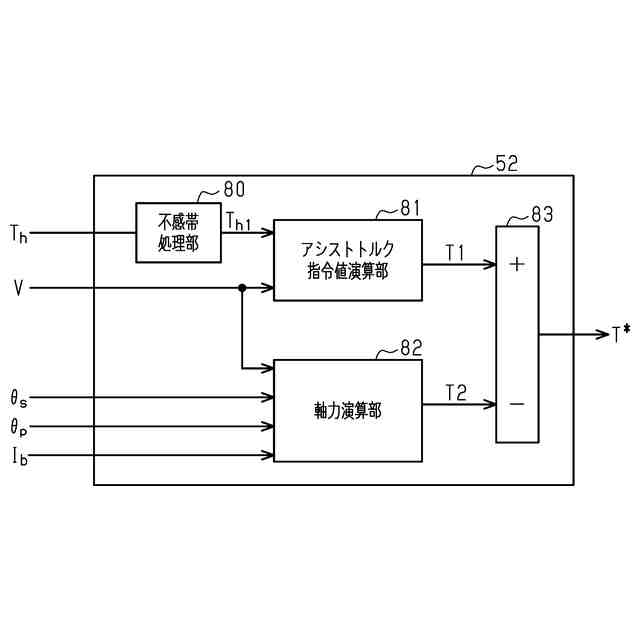
前記反力制御部は、車載のトルクセンサを通じて検出される操舵トルクの値が不感帯範囲内である場合には、前記操舵トルクの値を零に置き換える不感帯処理と、
前記不感帯処理が行われた後の前記操舵トルクに基づいて、前記ステアリングホイールの操舵方向と同方向のトルクであるアシストトルク指令値を演算する処理と、
前記転舵輪の転舵状態に基づいて、前記転舵輪を転舵させる転舵シャフトに作用する軸力を演算し、演算される前記軸力を前記ステアリングホイールに対するトルクに換算して軸力トルクを演算する処理と、
前記アシストトルク指令値から前記軸力トルクを減算することにより前記トルク指令値を演算する処理と、を実行するように構成され、
前記反力制御部は、前記制御モードが前記検査モードである場合には、前記不感帯処理が行われる前の前記操舵トルクに基づいて演算される前記アシストトルク指令値を前記検査用トルク指令値として使用するように構成される請求項1または請求項2に記載の操舵制御装置。
【請求項4】
前記検査は、前記操舵機構に通電して、ステアリングシャフトにトルクを加えたときの前記反力モータのトルク変動が許容範囲内であるかどうかを確認するためのトルク変動検査を含み、
前記反力制御部は、車載のトルクセンサを通じて検出される操舵トルクの値が不感帯範囲内である場合には、前記操舵トルクの値を零に置き換える不感帯処理と、
前記不感帯処理が行われた後の前記操舵トルクに基づいて、前記ステアリングホイールの操舵方向と同方向のトルクであるアシストトルク指令値を演算する処理と、
前記転舵輪の転舵状態に基づいて、前記転舵輪を転舵させる転舵シャフトに作用する軸力を演算し、演算される前記軸力を前記ステアリングホイールに対するトルクに換算して軸力トルクを演算する処理と、
前記アシストトルク指令値から前記軸力トルクを減算することにより前記トルク指令値を演算する処理と、を実行するように構成され、
前記軸力は、前記ステアリングホイールの操舵角に基づいて演算されるヒステリシス補償量を含み、前記ヒステリシス補償量は、前記転舵輪の摩擦によるヒステリシス特性を補償するための軸力であり、
前記反力制御部は、前記制御モードが前記検査モードである場合には、前記ヒステリシス補償量を前記ステアリングシャフトに対するトルクに換算して検査用軸力トルクを演算し、前記アシストトルク指令値から前記検査用軸力トルクを減算することにより、前記検査用トルク指令値を演算するように構成される請求項1または請求項2に記載の操舵制御装置。
【請求項5】
前記反力制御部は、前記ヒステリシス補償量に調整ゲインを乗じた値を前記ステアリングシャフトに対するトルクに換算することにより前記検査用軸力トルクを演算するように構成され、
前記調整ゲインは、前記トルク変動検査を適切に行う観点から設定される固定値である請求項4に記載の操舵制御装置。
【請求項6】
前記反力制御部は、外部からの命令を受けて前記制御モードを前記通常モードから前記検査モードに切り替えるように構成される請求項1または請求項2に記載の操舵制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操舵制御装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、電動パワーステアリング装置の駆動源としては、ブラシレスモータが使用されている。ブラシレスモータは、各種の検査を経て電動パワーステアリング装置に組み込まれる。たとえば、特許文献1には、ブラシレスモータのコギングトルクが許容範囲内であるかどうかを検査する方法が記載されている。検査は、検査装置の駆動源用モータにより、ブラシレスモータのロータを回転させながら行われる。
【先行技術文献】
【特許文献】
【0003】
特開2009-042137号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年では、ステアリングホイールと転舵輪との間の動力伝達を分離した、いわゆるステアバイワイヤ方式の操舵装置の開発が進んでいる。ステアバイワイヤ方式の操舵装置も、適切に検査する必要がある。
【課題を解決するための手段】
【0005】
上記課題を解決し得る操舵制御装置は、車両の転舵輪とステアリングホイールとの間の動力伝達が分離された操舵装置を制御するように構成される。前記操舵装置は、前記ステアリングホイールに加える操舵反力を発生するように構成される反力モータを含む操舵機構を有する。操舵制御装置は、前記ステアリングホイールの操舵状態に応じて演算されるトルク指令値に基づいて前記反力モータを制御するように構成される反力制御部を有する。前記反力制御部は、前記反力モータを制御する制御モードとして、前記車両を走行させるための通常モードと、前記操舵機構の検査を行うため検査モードとを有する。前記反力制御部は、前記制御モードが前記通常モードである場合には、前記トルク指令値として前記車両の走行に適した走行用トルク指令値を演算し、前記制御モードが前記検査モードである場合には、前記トルク指令値として前記検査に適した検査用トルク指令値を演算するように構成される。
【0006】
この構成によれば、制御モードが検査モードである場合には、トルク指令値として、検査に適した検査用トルク指令値が演算される。このため、操舵機構の検査を適切に行うことができる。
【0007】
上記の操舵制御装置において、前記検査は、第1の検査と第2の検査とを含んでいてもよい。この場合、前記反力制御部は、前記第1の検査が行われる場合には、前記検査用トルク指令値として前記第1の検査に適した第1の検査用トルク指令値を演算し、前記第2の検査が行われる場合には、前記検査用トルク指令値として前記第2の検査に適した第2の検査用トルク指令値を使用するように構成されてもよい。
【0008】
この構成によれば、第1の検査が行われる場合には、第1の検査に適した第1の検査用トルク指令値が検査用トルク指令値として演算される。また、第2検査が行われる場合には、第2の検査に適した第2の検査用トルク指令値が検査用トルク指令値として演算される。このため、操舵機構の第1の検査および第2の検査を適切に行うことができる。
【0009】
上記の操舵制御装置において、前記検査は、前記操舵機構に通電して、前記操舵機構の作動性あるいは入出力特性を確認するための比例負荷検査を含んでいてもよい。また、前記反力制御部は、車載のトルクセンサを通じて検出される操舵トルクの値が不感帯範囲内である場合には、前記操舵トルクの値を零に置き換える不感帯処理と、前記不感帯処理が行われた後の前記操舵トルクに基づいて、前記ステアリングホイールの操舵方向と同方向のトルクであるアシストトルク指令値を演算する処理と、前記転舵輪の転舵状態に基づいて、前記転舵輪を転舵させる転舵シャフトに作用する軸力を演算し、演算される前記軸力を前記ステアリングホイールに対するトルクに換算して軸力トルクを演算する処理と、前記アシストトルク指令値から前記軸力トルクを減算することにより前記トルク指令値を演算する処理と、を実行するように構成されてもよい。さらに、前記反力制御部は、前記制御モードが前記検査モードである場合には、前記不感帯処理が行われる前の前記操舵トルクに基づいて演算される前記アシストトルク指令値を前記検査用トルク指令値として使用するように構成されてもよい。
【0010】
この構成によれば、操舵装置が電動パワーステアリング装置である場合と同様に、操舵機構の比例負荷検査を適切に行うことができる。
上記の操舵制御装置において、前記検査は、前記操舵機構に通電して、ステアリングシャフトにトルクを加えたときの前記反力モータのトルク変動が許容範囲内であるかどうかを確認するためのトルク変動検査を含んでいてもよい。また、前記反力制御部は、車載のトルクセンサを通じて検出される操舵トルクの値が不感帯範囲内である場合には、前記操舵トルクの値を零に置き換える不感帯処理と、前記不感帯処理が行われた後の前記操舵トルクに基づいて、前記ステアリングホイールの操舵方向と同方向のトルクであるアシストトルク指令値を演算する処理と、前記転舵輪の転舵状態に基づいて、前記転舵輪を転舵させる転舵シャフトに作用する軸力を演算し、演算される前記軸力を前記ステアリングホイールに対するトルクに換算して軸力トルクを演算する処理と、前記アシストトルク指令値から前記軸力トルクを減算することにより前記トルク指令値を演算する処理と、を実行するように構成されてもよい。前記軸力は、前記ステアリングホイールの操舵角に基づいて演算されるヒステリシス補償量を含み、前記ヒステリシス補償量は、前記転舵輪の摩擦によるヒステリシス特性を補償するための軸力であってもよい。この場合、前記反力制御部は、前記制御モードが前記検査モードである場合には、前記ヒステリシス補償量を前記ステアリングシャフトに対するトルクに換算して検査用軸力トルクを演算し、前記アシストトルク指令値から前記検査用軸力トルクを減算することにより、前記検査用トルク指令値を演算するように構成されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カート
2か月前
個人
走行装置
3か月前
個人
電動走行車両
3か月前
個人
乗り物
4か月前
個人
閂式ハンドル錠
3か月前
個人
電動モビリティ
7か月前
個人
駐輪設備
26日前
個人
発音装置
6か月前
個人
折り畳み自転車
10か月前
個人
ボギー・フレーム
1か月前
個人
自転車用傘捕捉具
11か月前
個人
ルーフ付きトライク
1か月前
個人
ルーフ付きトライク
2か月前
個人
自由方向乗車自転車
7か月前
個人
“zen-go.”
2か月前
個人
体重掛けリフト台車
10か月前
個人
キャンピングトライク
8か月前
個人
アタッチメント
11か月前
個人
自転車用荷物台
10か月前
個人
パワーアシスト自転車
1か月前
個人
ステアリングの操向部材
8か月前
株式会社CPM
駐輪機
11か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社三五
リアサブフレーム
9か月前
個人
フロントフットブレーキ。
3か月前
個人
ホイールハブ駆動構造
3か月前
学校法人千葉工業大学
車両
9か月前
学校法人千葉工業大学
車両
9か月前
学校法人千葉工業大学
車両
9か月前
個人
乗用自動車のディフューザー
5日前
豊田鉄工株式会社
小型車両
2か月前
豊田合成株式会社
操舵装置
11か月前
ヤマハ発動機株式会社
車両
11か月前
ヤマハ発動機株式会社
車両
11か月前
ヤマハ発動機株式会社
車両
11か月前
ヤマハ発動機株式会社
車両
11か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ