TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142460
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024041818
出願日
2024-03-18
発明の名称
形状制御システム
出願人
株式会社日立製作所
代理人
弁理士法人平木国際特許事務所
主分類
G05B
13/02 20060101AFI20250924BHJP(制御;調整)
要約
【課題】機械学習を用いて対象物の形状を制御する形状制御システムにおいて、学習器の再学習によって学習モデルに対して与える意図しない影響を抑制しつつ、学習モデルのうち再学習によって更新したい部分を適切に更新する。
【解決手段】本発明に係る形状制御システムは、修正データが属するデータ空間内において前記修正データから閾値距離以上離れた領域内でサンプリングされたデータをコントローラモデルに対して入力したときの、修正前における前記コントローラモデルからの出力と修正後における前記コントローラモデルからの出力との間の差分が0に向かうように、前記コントローラモデルを修正する。
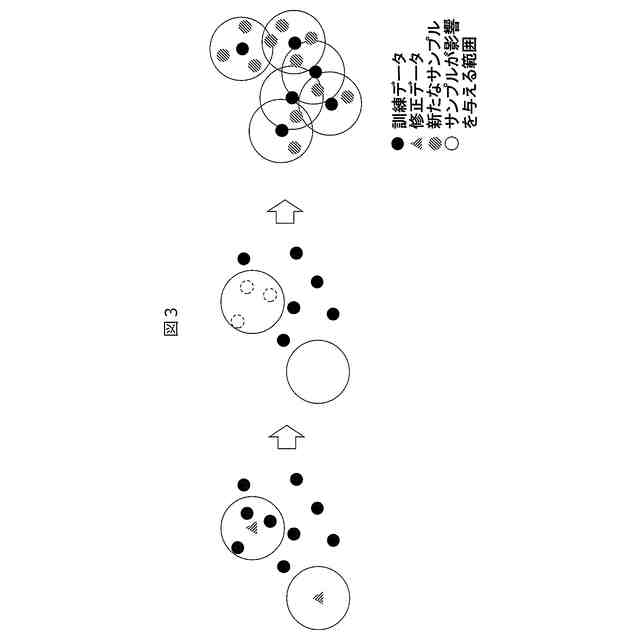
【選択図】図3
特許請求の範囲
【請求項1】
対象物の形状を制御する形状制御システムであって、
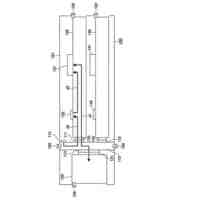
前記形状を制御するアクチュエータを備えた形状制御装置、
前記アクチュエータの操作量を前記形状制御装置に対して指示する制御計算機、
前記制御計算機が前記操作量を計算するために用いるコントローラモデルを機械学習によって生成するモデル生成計算機、
を備え、
前記モデル生成計算機は、前記コントローラモデルを修正するために用いる修正データによって前記コントローラモデルを修正するように構成されており、
前記モデル生成計算機は、前記修正データが属するデータ空間内において前記修正データから第1閾値距離以上離れた領域内でサンプリングされたデータを前記コントローラモデルに対して入力したときの、前記修正の前における前記コントローラモデルからの出力と前記修正の後における前記コントローラモデルからの出力との間の差分が0に向かうように、前記コントローラモデルを修正する
ことを特徴とする形状制御システム。
続きを表示(約 1,800 文字)
【請求項2】
前記モデル生成計算機は、前記コントローラモデルの機械学習を実施するために用いる訓練データによって前記機械学習を実施するように構成されており、
前記モデル生成計算機は、前記訓練データのうち、前記データ空間内において前記修正データからの距離が前記第1閾値距離以内である部分を除去した、除去済み訓練データを作成し、
前記モデル生成計算機は、前記データ空間内において前記除去済み訓練データからの距離が第2閾値距離以内のデータを用いて前記コントローラモデルを修正することにより、前記差分が0に向かうようにする
ことを特徴とする請求項1記載の形状制御システム。
【請求項3】
前記モデル生成計算機は、前記データ空間内において前記修正データからの距離が前記第1閾値距離以上かつ前記第1閾値距離よりも大きい第3閾値距離以内である領域内のデータを用いて前記コントローラモデルを修正することにより、前記差分が0に向かうようにする
ことを特徴とする請求項1記載の形状制御システム。
【請求項4】
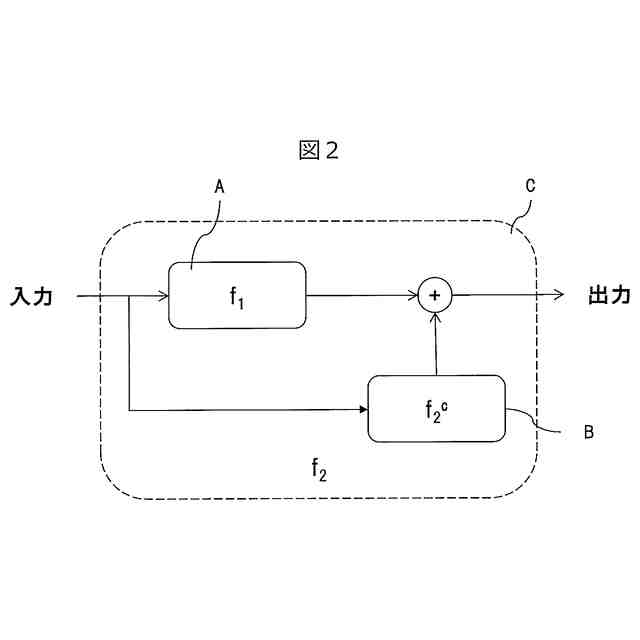
前記モデル生成計算機は、ベースモデルと差分モデルを加算することにより、前記コントローラモデルを修正するように構成されており、
前記モデル生成計算機は、前記ベースモデルのパラメータを変えずに前記差分モデルのパラメータを変えることにより、前記差分が0に向かうように、前記コントローラモデルを修正する
ことを特徴とする請求項1記載の形状制御システム。
【請求項5】
前記モデル生成計算機は、ベースモデルと差分モデルを加算することにより、前記コントローラモデルを修正するように構成されており、
前記制御計算機は、前記形状に基づき前記操作量を計算するように構成されており、
前記制御計算機は、前記操作量を計算するとき、前記データ空間内における前記形状の前記修正データからの距離が前記第1閾値距離以上である場合は、前記差分モデルからの出力を0にする
ことを特徴とする請求項1記載の形状制御システム。
【請求項6】
前記モデル生成計算機は、前記コントローラモデルの機械学習を実施するために用いる訓練データによって前記機械学習を実施するように構成されており、
前記モデル生成計算機は、前記データ空間内において、前記修正データの周辺または前記訓練データの周辺をサンプリングするとともに、前記サンプリングしたデータを用いて前記コントローラモデルを修正する
ことを特徴とする請求項1記載の形状制御システム。
【請求項7】
前記コントローラモデルは、前記対象物の目標形状と現形状との間の偏差を入力とするように構成されており、
前記モデル生成計算機は、前記偏差について前記データ空間内からサンプリングする際には、前記修正データを中心とする超球内または前記訓練データを中心とする超球内をサンプリングする
ことを特徴とする請求項6記載の形状制御システム。
【請求項8】
前記形状制御システムはさらに、前記コントローラモデルを構成するパラメータを入力するために用いるユーザインターフェースを提供する端末を備える
ことを特徴とする請求項1記載の形状制御システム。
【請求項9】
前記形状制御システムはさらに、前記修正の前後における前記コントローラモデルの変化度を提示するユーザインターフェースを提供する端末を備える
ことを特徴とする請求項1記載の形状制御システム。
【請求項10】
前記形状制御システムはさらに、前記コントローラモデルの性能を提示するユーザインターフェースを提供する端末を備え、
前記ユーザインターフェースは、
前記コントローラモデルに対して入力する正解データに対して前記アクチュエータが反応したか否かが、前記コントローラモデルが出力する推定結果の推定値と前記推定結果の正解値との間で一致しているか否か表す反応率、
前記コントローラモデルに対して入力する正解データに対する前記アクチュエータの操作量の符号が、前記コントローラモデルが出力する推定結果の推定値と前記推定結果の正解値との間で一致する程度を表す極性一致率、
のうち少なくともいずれかを提示する
ことを特徴とする請求項1記載の形状制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物の形状を制御する形状制御システムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
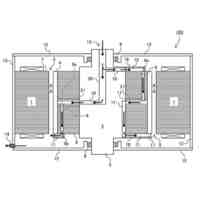
圧延システムは、回転する2つのロール間に金属を通すことにより、その金属を板状などの形状に加工するシステムである。圧延システムを制御する手法として、機械学習を用いるものがある。この手法においては、例えば材料の目標形状やアクチュエータの操作量を制御目標(学習器からの出力)とするとともに、圧延システムの動作パラメータなどを入力パラメータ(学習器に対する入力)として、あらかじめ機械学習を実施することにより、目標形状を得るための制御パラメータを演算する。
【0003】
下記特許文献1は、『制御対象プラントの状態を悪化させる事無く、実績データに対する最適な操作方法を学習させる。』ことを課題として、『制御対象プラント1の実績データと制御操作の組合せを学習する制御方法学習装置21と、学習した実績データと制御操作の組合せに応じて制御対象プラントの制御を実施する制御実行装置20を備え、制御方法学習装置が学習する事で、制御対象プラントの状態に応じて複数の制御目標に対して別個の実績データと制御操作の組合せを得、得られた実績データと制御操作の組合せを制御ルール実行部10における制御対象プラントの実績データと制御操作の定められた組合せとして使用し、制御対象プラントの状態が修正前の実績データと制御操作の組合せに類似した場合、修正後の学習データを用いて制御を実施することを特徴とする。』という技術を記載している(要約参照)。
【先行技術文献】
【特許文献】
【0004】
特開2019-028824号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
機械学習を用いて圧延システムを制御する従来技術において、学習器を再学習する際には、再学習のために用いる修正データによって、追加的学習を実施する。この修正データは、学習器を初期学習するとき用いた訓練データとは異なるデータである。再学習によって学習器内の学習結果が更新され、初期学習モデルは修正後学習モデルとなる。
【0006】
修正データによって再学習を実施するとき、初期学習モデルのうち修正データと直接的に関連する部分のみを更新することができれば望ましい。再学習は、初期学習モデルを部分的に更新するためのものであることが通常だからである。しかし修正データが初期学習モデルに対して与える影響範囲は、必ずしも修正しようとしている部分に限られているわけではない。学習モデル内部のデータ構造は一般に複雑であり、内部要素が相互に影響し合うからである。そうすると、修正データを用いて再学習を実施することにより、学習モデルのうち再学習とは直接関係しない部分が更新され、学習器からの出力が意図せず変化してしまう可能性がある。
【0007】
本発明は、以上のような課題に鑑みてなされたものであり、機械学習を用いて対象物の形状を制御する形状制御システムにおいて、学習器の再学習によって学習モデルに対して与える意図しない影響を抑制しつつ、学習モデルのうち再学習によって更新したい部分を適切に更新することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る形状制御システムは、修正データが属するデータ空間内において前記修正データから閾値距離以上離れた領域内でサンプリングされたデータをコントローラモデルに対して入力したときの、修正前における前記コントローラモデルからの出力と修正後における前記コントローラモデルからの出力との間の差分が0に向かうように、前記コントローラモデルを修正する。
【発明の効果】
【0009】
本発明に係る形状制御システムによれば、機械学習を用いて対象物の形状を制御する形状制御システムにおいて、学習器の再学習によって学習モデルに対して与える意図しない影響を抑制しつつ、学習モデルのうち再学習によって更新したい部分を適切に更新することができる。上記した以外の課題、構成、および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
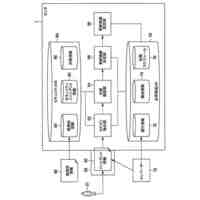
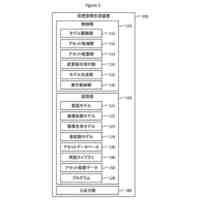
実施形態1に係る形状制御システムが用いる学習器の構成を示す模式図である。
実施形態1における学習器の概念図である。
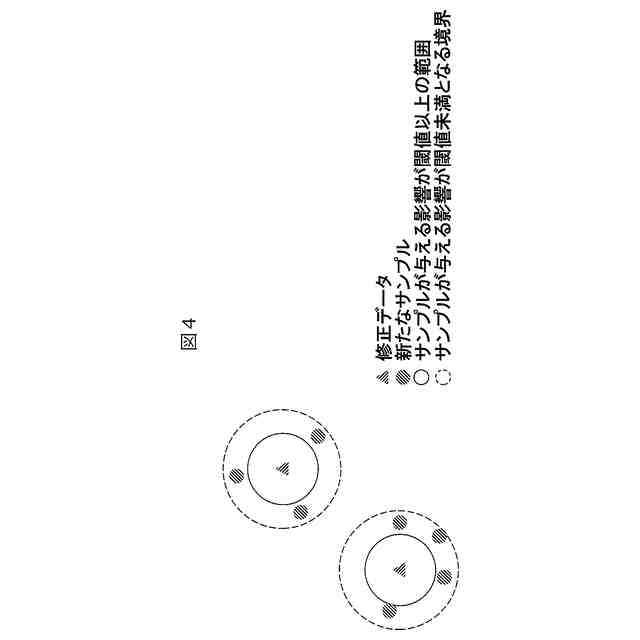
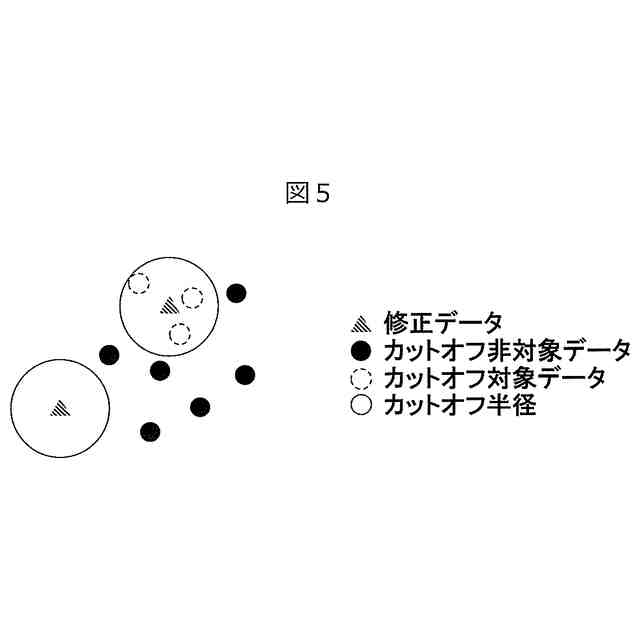
差分モデルBからの出力を0に近づける手法を説明する模式図である。
差分モデルBからの出力を0に近づける別手法を説明する模式図である。
差分モデルBからの出力を0に近づける別手法を説明する模式図である。
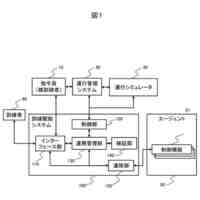
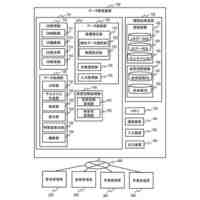
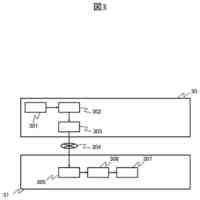
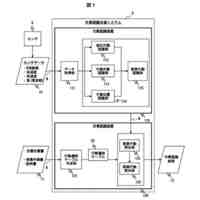
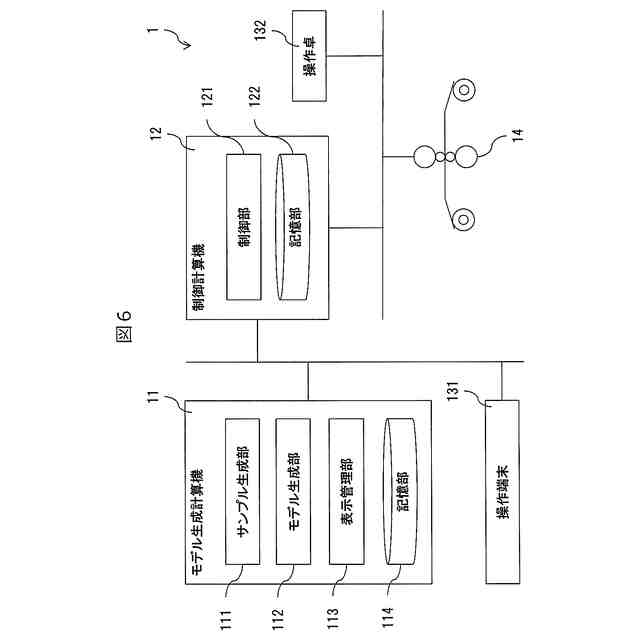
実施形態2に係る形状制御システム1の構成図である。
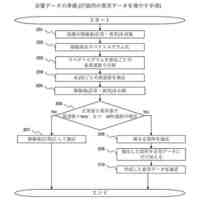
モデル生成計算機11が初期学習モデルAを生成する手順を説明するフローチャートである。
モデル生成計算機11が修正後学習モデルCを生成する手順を説明するフローチャートである。
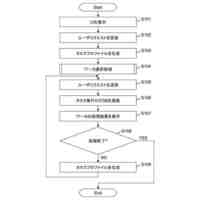
モデル生成計算機11がサンプリングデータを収集する過程を説明するフローチャートである。
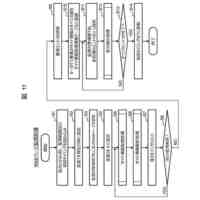
制御計算機12が形状制御装置14を制御する手順を説明するフローチャートである。
反応率と極性一致率それぞれの計算式を示す。
モデル変化度の計算式を示す。
形状制御システム1が提供するユーザインターフェースの例を示す。
モデル生成計算機11が生成する学習器が機械学習を実施する際に用いる目的関数の例である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
鉄道車両
11日前
株式会社日立製作所
半導体装置
19日前
株式会社日立製作所
ガス濃度測定装置
11日前
株式会社日立製作所
形状制御システム
5日前
株式会社日立製作所
欠陥知識循環システム
25日前
株式会社日立製作所
計画装置および計画方法
17日前
株式会社日立製作所
訓練システムおよび訓練方法
7日前
株式会社日立製作所
管理システムおよび管理方法
7日前
株式会社日立製作所
人物特性推定システム及び方法
26日前
株式会社日立製作所
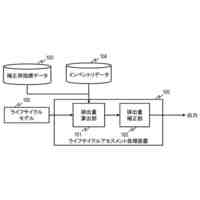
費用対効果算出方法および装置
5日前
株式会社日立製作所
情報処理装置及び情報処理方法
7日前
株式会社日立製作所
回転電機および電動機システム
3日前
株式会社日立製作所
状態検知装置及び状態検知方法
19日前
株式会社日立製作所
情報処理装置及び情報処理方法
3日前
株式会社日立製作所
情報処理システム、及び予測方法
4日前
株式会社日立製作所
電子機器および電子機器制御方法
19日前
株式会社日立製作所
電力変換器およびインバータ装置
7日前
株式会社日立製作所
建物管理システム及び建物管理方法
17日前
株式会社日立製作所
Webページ更新管理装置及び方法
11日前
株式会社日立製作所
音声分析システム及び音声分析方法
11日前
株式会社日立製作所
異常検知システム及び異常検知方法
17日前
株式会社日立製作所
昇降機システム及び昇降機制御方法
7日前
株式会社日立製作所
計算機システム及びデータ検索方法
7日前
株式会社日立製作所
ログ抽出方法及びログ抽出システム
27日前
株式会社日立製作所
障害対応システム及び障害対応方法
25日前
株式会社日立製作所
物流計画システム及び物流計画方法
5日前
株式会社日立製作所
制御装置、制御方法およびプログラム
19日前
株式会社日立製作所
電力監視システムおよび電力監視方法
17日前
株式会社日立製作所
通貨管理システム、及び通貨管理方法
11日前
株式会社日立製作所
データ出力装置およびデータ出力方法
7日前
株式会社日立製作所
設計図書のチェックシステムおよび方法
3日前
株式会社日立製作所
鉄道システムおよび鉄道車両の制御方法
27日前
株式会社日立製作所
計算機システム及びタスクの割当制御方法
17日前
株式会社日立製作所
仮想空間生成装置および仮想空間生成方法
3日前
株式会社日立製作所
支援装置、支援方法、及び支援プログラム
17日前
株式会社日立製作所
作業認識支援システム及び作業認識支援方法
7日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ