TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025149144
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049605
出願日
2024-03-26
発明の名称
伝達機構及びロボット
出願人
本田技研工業株式会社
代理人
弁理士法人大島特許事務所
主分類
F16C
1/06 20060101AFI20251001BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】双方向のトルク伝達を良好に行うことができる伝達機構、及び、当該伝達機構を備えたロボットを提供する。
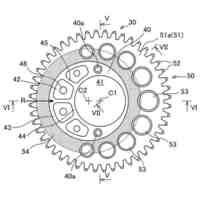
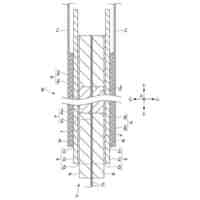
【解決手段】トルクを双方向に出力可能な駆動装置6と、駆動装置が出力するトルクにより駆動される従動部材4との間に介在し、トルクを伝達する伝達機構10であって、トルクが入力される入力側端部と、トルクを出力する出力側端部とを備えた可撓性を有するシャフト21を有し、シャフトが入力側端部に入力されるトルクとシャフトの捩じれ角との間に点対称となる捩じり剛性特性を有する。
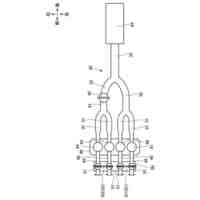
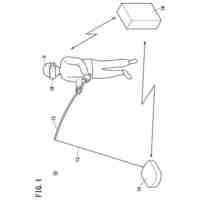
【選択図】図1
特許請求の範囲
【請求項1】
トルクを双方向に出力可能な駆動装置と、前記駆動装置が出力するトルクにより駆動される従動部材との間に介在し、トルクを伝達する伝達機構であって、
トルクが入力される入力側端部と、トルクを出力する出力側端部とを備えた可撓性を有するシャフトを有し、
前記シャフトが前記入力側端部に入力されるトルクと前記シャフトの捩じれ角との間に点対称となる捩じり剛性特性を有する伝達機構。
続きを表示(約 690 文字)
【請求項2】
前記シャフトが、捩じれ角が零であるときに、捩じれ角に対するトルクの変化率の大きさが最小となる捩じり剛性特性を有する請求項1に記載の伝達機構。
【請求項3】
前記シャフトの前記捩じり剛性特性が、捩じれ角が零である点を含み、捩じれ角に対するトルクの変化率が所定の閾値以下である低剛性領域と、捩じれ角に対するトルクの変化率が前記閾値より大きい高剛性領域と、を含む請求項1に記載の伝達機構。
【請求項4】
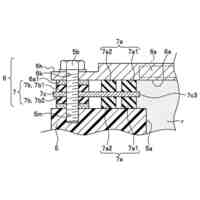
前記シャフトが挿入される貫通孔を備えたケーシングを有し、
前記貫通孔を画定する壁体の少なくとも一部はフッ素樹脂によって構成されている請求項1~請求項3のいずれか1つの項に記載の伝達機構。
【請求項5】
前記シャフトの外周面及び前記貫通孔を画定する前記ケーシングの内周面と間にグリスが充填されている請求項4に記載の伝達機構。
【請求項6】
前記グリスは前記貫通孔を画定する壁体の少なくとも一部と同じ材質の前記フッ素樹脂を含む請求項5に記載の伝達機構。
【請求項7】
前記駆動装置と、前記従動部材と、請求項1~請求項3のいずれか1つの項に記載の前記伝達機構とを備えたロボットであって、
前記駆動装置を支持する基体と、
前記基体及び前記従動部材の間に介在し、前記基体及び前記従動部材それぞれに対して変位可能なリンクと、
前記リンクに支持され、前記伝達機構を介して入力されたトルクにより前記従動部材を前記リンクに対して変位させる変位機構と、を有するロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トルクを伝達するための伝達機構、及び、その伝達機構を備えたロボットに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、回転駆動するアクチュエータを備えたロボットハンドが知られている(例えば、特許文献1)。特許文献1のロボットハンドは、掌部と、掌部に回転可能に接続された指部とを備える。指部には可撓性ケーブルの一端が接続されている。指部は、可撓性ケーブルの他端を直動させることで、掌部に対して伸展した位置(以下、伸展位置)と、屈曲した位置(以下、屈曲位置)とに変位する。
【0003】
回転アクチュエータはフレキシブルシャフトを介してリードスクリューアッセンブリに接続されている。アクチュエータのトルクはフレキシブルシャフトを介してリードスクリューアッセンブリに伝達される。リードスクリューアッセンブリは伝達されたトルクを可撓性ケーブルの一端の直線運動に変換する。これにより、回転アクチュエータの駆動によって、指部の一端が移動し、指部が伸展位置と屈曲位置との間で変位する。
【先行技術文献】
【特許文献】
【0004】
米国特許第6244644号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
フレキシブルシャフトは主として、予め定められた一方向のトルクを伝達するために使用される。そのため、本願発明者らは、このようなフレキシブルシャフトを双方向のトルクを伝達するために使用すると、フレキシブルシャフトの捩じり剛性がトルクの大きさや作用方向に依存することになるため、例えば、従動部材の駆動制御に問題が生じ得ることを見出した。
【0006】
本発明は、以上の背景に鑑み、双方向のトルク伝達を良好に行うことができる伝達機構、及び、当該伝達機構を備えたロボットを提供することを課題とする。
【課題を解決するための手段】
【0007】
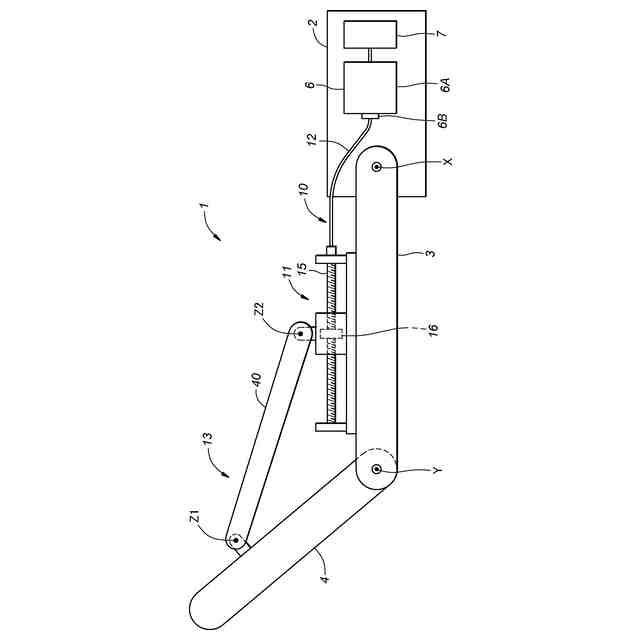
上記課題を解決するために本発明のある態様は、トルクを双方向に出力可能な駆動装置(6)と、前記駆動装置が出力するトルクにより駆動される従動部材(4)との間に介在し、トルクを伝達する伝達機構(10)であって、トルクが入力される入力側端部と、トルクを出力する出力側端部とを備えた可撓性を有するシャフト(21)を有し、前記シャフトが前記入力側端部に入力されるトルクと前記シャフトの捩じれ角との間に点対称となる捩じり剛性特性を有する。
【0008】
この態様によれば、シャフトがトルクと捩じれ角との間に点対称となる捩じり剛性特性を有する。これにより、フレキシブルシャフトの捩じり剛性がトルクの大きさや作用方向に依存し難くなるため、双方向のトルク伝達を良好に行うことができる伝達機構が提供される。
【0009】
上記の態様において、好ましくは、前記シャフトが、捩じれ角が零であるときに、捩じれ角に対するトルクの変化率の大きさが最小となる捩じり剛性特性を有する。
【0010】
この態様によれば、捩じれ角が零であるとき、トルクに対する捩じれ角の変化量が最大となる。そのため、捩じれ角が零近傍であるときに、シャフトにトルク入力があった場合には、シャフトのねじれ変形を促進することができるため、良好に衝撃吸収を行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
6日前
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
車両
5日前
本田技研工業株式会社
車両
6日前
本田技研工業株式会社
飛行体
6日前
本田技研工業株式会社
内燃機関
5日前
本田技研工業株式会社
電気部品
6日前
本田技研工業株式会社
内燃機関
6日前
本田技研工業株式会社
排気装置
5日前
本田技研工業株式会社
除草装置
5日前
本田技研工業株式会社
排気装置
5日前
本田技研工業株式会社
発電セル
5日前
本田技研工業株式会社
電気機器
6日前
本田技研工業株式会社
清掃装置
6日前
本田技研工業株式会社
触媒装置
1日前
本田技研工業株式会社
二次電池
1日前
本田技研工業株式会社
固体電池
1日前
本田技研工業株式会社
排気装置
5日前
本田技研工業株式会社
制御装置
5日前
本田技研工業株式会社
エンジン
6日前
本田技研工業株式会社
収容装置
6日前
本田技研工業株式会社
電気機器
6日前
本田技研工業株式会社
固体電池
5日前
本田技研工業株式会社
全固体電池
1日前
本田技研工業株式会社
樹脂成型品
6日前
本田技研工業株式会社
鞍乗型車両
5日前
本田技研工業株式会社
鞍乗型車両
5日前
本田技研工業株式会社
全固体電池
1日前
本田技研工業株式会社
鞍乗型車両
5日前
本田技研工業株式会社
リアクトル
5日前
本田技研工業株式会社
電極積層体
5日前
本田技研工業株式会社
電動船外機
1日前
本田技研工業株式会社
始動制御装置
5日前
本田技研工業株式会社
遊戯システム
6日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
充電システム
6日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ