TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025153261
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055646
出願日
2024-03-29
発明の名称
制御装置
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
B62D
6/00 20060101AFI20251002BHJP(鉄道以外の路面車両)
要約
【課題】運転者の操舵と運転支援による操舵とを考慮して操舵制御することが可能な制御装置を提供する。
【解決手段】運転者による操舵装置46の操舵と、制御装置30による操舵装置46の操舵と、が可能な車両1を制御する制御装置30であって、操舵装置46における操舵トルクと、舵角速度と、制御装置30による指示舵角と操舵装置46の実舵角との差である舵角偏差と、を取得する取得部31と、制御装置30よる操舵装置46の操舵が行われているときに、操舵トルクと、舵角速度と、舵角偏差と、に基づいて、運転者が意図する操舵状態であるか、制御装置30が意図する操舵状態であるか、をそれぞれ判定する判定部32と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
運転者による操舵装置の操舵と、制御装置による前記操舵装置の操舵と、が可能な車両を制御する制御装置であって、
前記操舵装置における操舵トルクと、舵角速度と、前記制御装置による指示舵角と前記操舵装置の実舵角との差である舵角偏差と、を取得する取得部と、
前記制御装置による前記操舵装置の操舵が行われているときに、前記操舵トルクと、前記舵角速度と、前記舵角偏差と、に基づいて、前記運転者が意図する操舵状態であるか、前記制御装置が意図する操舵状態であるか、をそれぞれ判定する判定部と、を備える、
制御装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記判定部は、
時計回りと反時計回りとのうちの一方向である操舵方向における前記操舵トルクが第1閾値未満、かつ前記操舵方向における前記舵角速度が第2閾値以上である場合、
又は、前記操舵方向における前記操舵トルクが前記第1閾値より小さい第3閾値以上、かつ前記操舵方向における前記舵角速度が前記第2閾値より小さい第4閾値未満である場合に、前記運転者が意図する操舵状態でない第1反操舵状態と判定し、
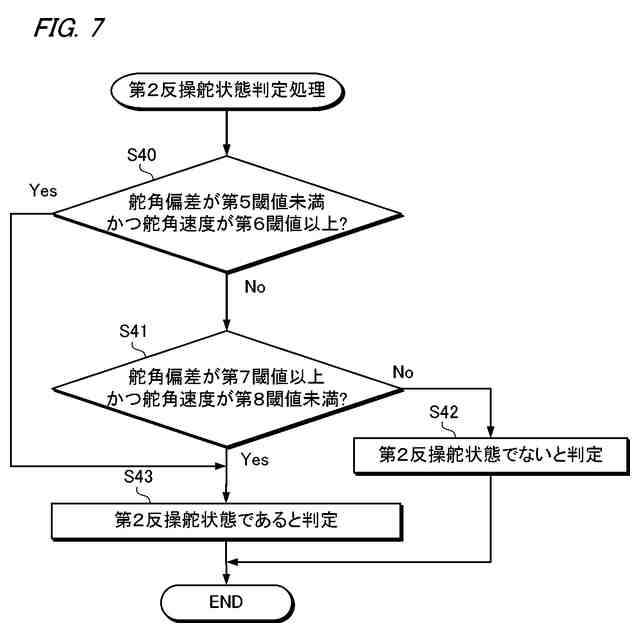
前記操舵方向における前記舵角偏差が第5閾値未満、かつ前記操舵方向における前記舵角速度が第6閾値以上である場合、
又は、前記操舵方向における前記舵角偏差が第5閾値より大きい第7閾値以上、かつ前記操舵方向における前記舵角速度が第6閾値より小さい第8閾値未満である場合に、前記制御装置が意図する操舵状態でない第2反操舵状態と判定し、
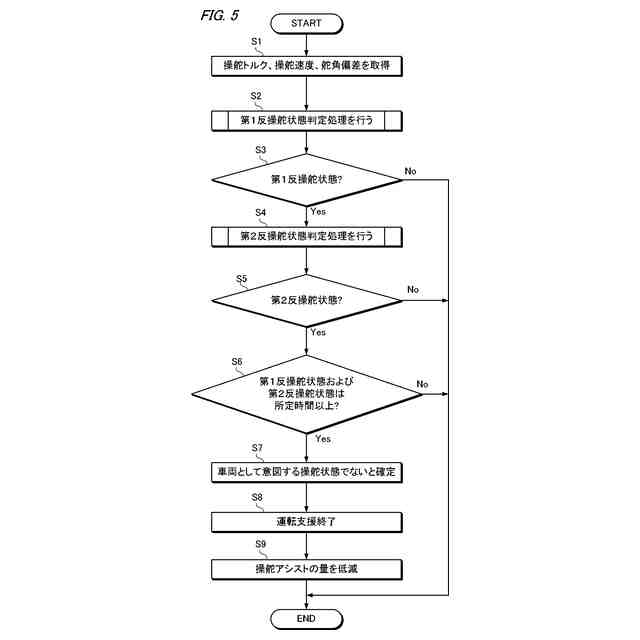
前記第1反操舵状態および第2反操舵状態であると判定した場合に、前記車両として意図する操舵状態でないと判定する、
制御装置。
【請求項3】
請求項2に記載の制御装置であって、
前記判定部は、
前記第1反操舵状態および第2反操舵状態であると所定時間以上判定した場合に、前記車両として意図する操舵状態でないと判定する、
制御装置。
【請求項4】
請求項3に記載の制御装置であって、
前記判定部は、
前記第1反操舵状態であると第1所定時間以上判定し、かつ前記第2反操舵状態であると第2所定時間以上判定した場合に、前記車両として意図する操舵状態でないと判定し、
当該車両として意図する操舵状態でないと判定する前記所定時間の条件を緩和する、
制御装置。
【請求項5】
請求項1に記載の制御装置であって、
前記制御装置による操舵を実行する制御部を更に備え、
前記制御部は、前記判定部により前記車両として意図する操舵状態でないと判定された場合、前記制御装置による操舵を終了する、
制御装置。
【請求項6】
請求項1に記載の制御装置であって、
前記運転者による操舵をアシストする制御部を更に備え、
前記運転者による操舵はアクチュエータにより前記操舵トルクを増大させる操舵アシストが可能であり、
前記制御部は、前記判定部により前記車両として意図する操舵状態でないと判定された場合、前記運転者の操舵に対する操舵アシストの量を低減させる、
制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、脆弱な立場にある交通参加者にも配慮した持続可能な輸送システムへのアクセスを提供するための取り組みが活発化している。この取り組みの1つとして、交通の安全性や利便性をより改善すべく、自動車等の車両における運転支援技術や予防安全技術に関する研究開発が行われている。
【0003】
例えば、従来、運転者の意図した操舵となるように、操舵トルクをアシストする電動パワーステアリング装置が知られている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0004】
特開2019-006393号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、近年、運転支援を行う制御装置やシステムが操舵を行うことがあり(例えば車線維持を行う運転支援による操舵)、そのような場合、運転者の操舵のみを考慮して車両を制御するだけでは不十分となる可能性がある。したがって、運転者の操舵に加えて運転支援による操舵(運転支援を行う制御装置やシステムの操舵)を考慮して操舵制御することが望まれる。
【0006】
本発明は、運転者の操舵と運転支援による操舵とを考慮して操舵制御することが可能な制御装置を提供する。
【課題を解決するための手段】
【0007】
本発明の一態様は、
運転者による操舵装置の操舵と、制御装置による前記操舵装置の操舵と、が可能な車両を制御する制御装置であって、
前記操舵装置における操舵トルクと、舵角速度と、前記制御装置による指示舵角と前記操舵装置の実舵角との差である舵角偏差と、を取得する取得部と、
前記制御装置による前記操舵装置の操舵が行われているときに、前記操舵トルクと、前記舵角速度と、前記舵角偏差と、に基づいて、前記運転者が意図する操舵状態であるか、前記制御装置が意図する操舵状態であるか、をそれぞれ判定する判定部と、を備える。
【発明の効果】
【0008】
本発明によれば、運転者の操舵と運転支援による操舵とに基づいて操舵制御することを可能とする。そして、延いては、交通の安全性を改善し、持続可能な輸送システムの発展に寄与するものである。
【図面の簡単な説明】
【0009】
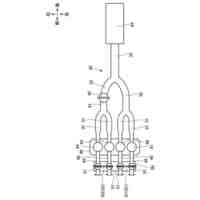
一実施形態の制御装置30が搭載された車両1の概略構成を示すブロック図である。
運転者の操舵状態を説明するための図である。
制御装置30の操舵状態を説明するための図である。
車両1として意図する操舵状態でないシチュエーションの一例を説明するための図である。
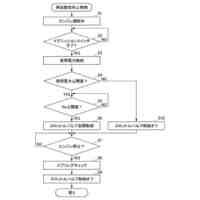
一実施形態の制御装置30が実行する処理の一例を示すフローチャート(その1)である。
一実施形態の制御装置30が実行する処理の一例を示すフローチャート(その2)である。
一実施形態の制御装置30が実行する処理の一例を示すフローチャート(その3)である。
【発明を実施するための形態】
【0010】
以下、本発明の車両制御装置の一実施形態について、図面を参照しながら説明する。以下の実施形態は本発明を限定するものではなく、以下の実施形態で説明する要素の全てが本発明に必須のものとは限らない。また、本発明の趣旨を逸脱しない範囲において、以下の実施形態で説明する2以上の要素を任意に組み合わせてもよい。なお、以下では、同一又は類似の要素には同一又は類似の符号を付して、その説明を省略又は簡略化することがある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
4日前
本田技研工業株式会社
車両
4日前
本田技研工業株式会社
排気装置
4日前
本田技研工業株式会社
排気装置
4日前
本田技研工業株式会社
固体電池
今日
本田技研工業株式会社
排気装置
4日前
本田技研工業株式会社
二次電池
今日
本田技研工業株式会社
除草装置
4日前
本田技研工業株式会社
発電セル
4日前
本田技研工業株式会社
触媒装置
今日
本田技研工業株式会社
固体電池
4日前
本田技研工業株式会社
内燃機関
4日前
本田技研工業株式会社
全固体電池
今日
本田技研工業株式会社
全固体電池
今日
本田技研工業株式会社
鞍乗型車両
4日前
本田技研工業株式会社
鞍乗型車両
4日前
本田技研工業株式会社
電極積層体
4日前
本田技研工業株式会社
リアクトル
4日前
本田技研工業株式会社
電動船外機
今日
本田技研工業株式会社
電池製造装置
4日前
本田技研工業株式会社
始動制御装置
4日前
本田技研工業株式会社
燃料電池装置
4日前
本田技研工業株式会社
鞍乗り型車両
4日前
本田技研工業株式会社
燃料電池構造
4日前
本田技研工業株式会社
車両制御装置
4日前
本田技研工業株式会社
始動制御装置
4日前
本田技研工業株式会社
電池モジュール
今日
本田技研工業株式会社
電池モジュール
今日
本田技研工業株式会社
電気部品冷却構造
4日前
本田技研工業株式会社
バッテリシステム
今日
本田技研工業株式会社
燃料電池スタック
4日前
本田技研工業株式会社
バッテリシステム
今日
本田技研工業株式会社
コンデンサユニット
4日前
本田技研工業株式会社
固体電池の制御方法
4日前
本田技研工業株式会社
可変ファンネル装置
4日前
本田技研工業株式会社
バッテリモジュール
4日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ