TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152242
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024054052
出願日
2024-03-28
発明の名称
作業車両
出願人
日立建機株式会社
代理人
弁理士法人武和国際特許事務所
主分類
B62D
11/00 20060101AFI20251002BHJP(鉄道以外の路面車両)
要約
【課題】オペレータが意図しないタイミングで位置制御モードと速度制御モードとが切り替わるのを防ぐ。
【解決手段】車体(5,9)と、車体に支持される走行輪(4,8)と、走行輪(4)の操舵角を所定の中立角から左右に変化させるアクチュエータ(221,222)と、ステアリングレバー(215)と、ステアリングレバーの制御モードを、ステアリングレバーの操作量に応じた速度で走行輪の操舵角を変化させるようアクチュエータを制御する速度制御モードと、ステアリングレバーの操作量に応じた走行輪の操舵角となるようアクチュエータを制御する位置制御モードとに切り替えるコントローラ(210)と、を備えた作業車両(1)において、コントローラは、ステアリングレバーの操作に基づいて車体の屈曲角(θ)を算出し、車体の屈曲角が所定の閾値未満(θ1)の場合に、制御モードを速度制御モードと位置制御モードのうち一方から他方に切り替える。
【選択図】図7
特許請求の範囲
【請求項1】
屈曲可能な車体と、
前記車体に支持される走行輪と、
前記走行輪の操舵角を所定の中立角から左右に変化させるアクチュエータと、
前記アクチュエータを操作するステアリングレバーと、
前記ステアリングレバーの制御モードを、前記ステアリングレバーの操作量に応じた速度で前記走行輪の操舵角を変化させるよう前記アクチュエータを制御する速度制御モードと、前記ステアリングレバーの操作量に応じた前記走行輪の操舵角となるよう前記アクチュエータを制御する位置制御モードとに切り替えるコントローラと、を備えた作業車両において、
前記コントローラは、
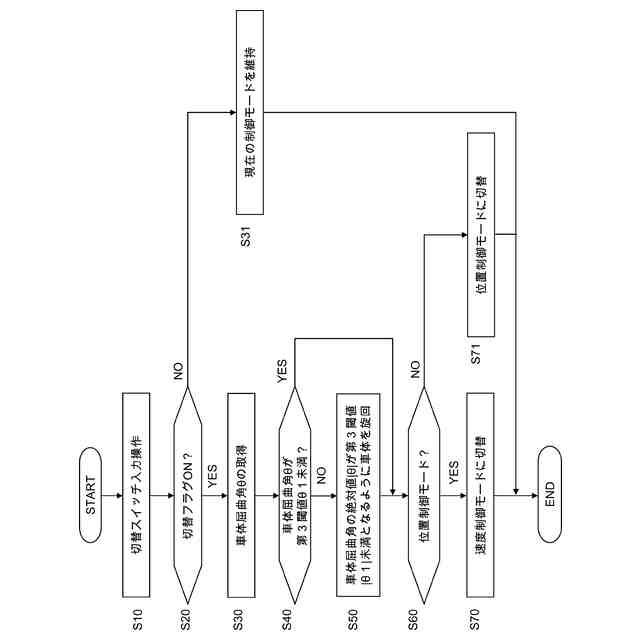
所定の切替条件が成立していると判断した場合に、前記ステアリングレバーの操作に基づいて前記車体の屈曲角を算出し、当該車体の屈曲角が所定の閾値未満の場合に、前記制御モードを前記速度制御モードと前記位置制御モードのうち一方から他方に切り替える、
ことを特徴とする作業車両。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の作業車両において、
前記コントローラは、前記車体の屈曲角が前記所定の閾値以上の場合に、前記車体の屈曲角が前記所定の閾値未満となるよう前記アクチュエータを制御した後に、前記制御モードを前記速度制御モードと前記位置制御モードのうち一方から他方に切り替える、
ことを特徴とする作業車両。
【請求項3】
請求項2に記載の作業車両において、
前記車体に搭載される原動機と、
前記原動機により駆動される油圧ポンプと、
前記車体の前部に設けられ、前記油圧ポンプから供給される圧油により駆動されるフロント装置と、
前記ステアリングレバーの操作量に応じて作動し、前記アクチュエータに供給する作動油の流量を制御するステアリング比例弁と、
前記原動機の回転数を調整するアクセルペダルと、
前記車体を停止させるパーキングブレーキと、を更に備え、
前記アクチュエータは、前記油圧ポンプから供給される圧油により駆動され、
前記コントローラは、
前記フロント装置の作動状態を判断するフロント装置作動判断部と、
前記ステアリングレバーの作動状態を判断するステアリングレバー作動判断部と、
前記アクセルペダルの操作状態を判断するペダル操作状態判断部と、
前記パーキングブレーキの作動状態を判断するパーキングブレーキ作動判断部と、
前記原動機の回転数を判断する原動機回転数判断部と、
前記車体の車速を判断する車速判断部と、
前記車体の屈曲角を判断する車体屈曲角判断部と、
前記ステアリング比例弁の出力を判断するステアリング比例弁出力判断部と、を含み、
前記コントローラは、
前記フロント装置が非作動状態、前記ステアリングレバーが非作動状態、前記アクセルペダルが非操作状態、前記パーキングブレーキが作動状態、前記原動機の回転数が第1閾値以下、前記車速が第2閾値以下、前記車体の屈曲角が第3閾値以下、及び、前記ステアリング比例弁の出力が最低出力となったとき、前記所定の切替条件が成立していると判断する、
ことを特徴とする作業車両。
【請求項4】
請求項3に記載の作業車両において、
前記コントローラは、
前記所定の切替条件が成立している時間を計測する時間計測部と、
前記時間が所定時間を経過したか否かを判断する時間経過判断部と、を更に含み、
前記コントローラは、前記時間が前記所定時間を経過していると判断した場合に、前記制御モードを前記速度制御モードと前記位置制御モードのうち一方から他方に切り替える、
ことを特徴とする作業車両。
【請求項5】
請求項4に記載の作業車両において、
オペレータによる前記速度制御モードと前記位置制御モードの切替操作を受け付ける切替操作受付部を更に備え、
前記コントローラは、
前記切替操作受付部から前記切替操作が入力された場合に、前記制御モードを前記速度制御モードと前記位置制御モードのうち一方から他方に切り替える、
ことを特徴とする作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
ホイールローダに代表される作業車両は、走行輪を左右に操舵するためのステアリングホイール、又は、ステアリングレバー等のステアリング部材を備える。そして、ステアリング部材の操作による操舵角の制御モードには、位置制御モードと速度制御モードとがある。具体的には、位置制御モードでは、操舵角が、ステアリング部材の操作量に応じた角度に設定される。一方、速度制御モードでは、ステアリング部材の操作量に応じた速度で、操舵角が変化する。
【0003】
特許文献1では、第1ステアリング部材は、左操舵範囲、右操舵範囲、又は、中立範囲のいずれかの範囲に操作が可能である。このように、操舵範囲を左操舵範囲、右操舵範囲、及び、中立範囲に分割する。そして、第1ステアリング部材が左操舵範囲、又は、右操舵範囲の範囲内に位置する場合には、第1ステアリング部材の操作量に応じた速度でアクチュエータを制御する。一方で、第1ステアリング部材が中立範囲の範囲内に位置する場合には、操舵角を中立角に戻すようにアクチュエータを制御する。このようにして、第1ステアリング部材が左操舵範囲、又は、右操舵範囲の範囲内に位置する場合には、速度制御型で、微小な操舵角の操作を滑らかに行えるようにする。一方で、第1ステアリング部材が中立範囲の範囲内に位置する場合には、操舵角を中立角に戻して、作業機械を容易に直進させるようにする技術が知られている。
【先行技術文献】
【特許文献】
【0004】
特開2023-13527号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の技術は、ステアリング部材の操舵範囲に応じてアクチュエータを制御(操舵角を制御)するため、オペレータが意図しないタイミングで位置制御モードと速度制御モードとが切り替わる場合がある。
【0006】
そこで、本発明は、オペレータが意図しないタイミングで位置制御モードと速度制御モードとが切り替わるのを防ぐことを目的とする。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、代表的な本発明は、屈曲可能な車体と、前記車体に支持される走行輪と、前記走行輪の操舵角を所定の中立角から左右に変化させるアクチュエータと、前記アクチュエータを操作するステアリングレバーと、前記ステアリングレバーの制御モードを、前記ステアリングレバーの操作量に応じた速度で前記走行輪の操舵角を変化させるよう前記アクチュエータを制御する速度制御モードと、前記ステアリングレバーの操作量に応じた前記走行輪の操舵角となるよう前記アクチュエータを制御する位置制御モードとに切り替えるコントローラと、を備えた作業車両において、前記コントローラは、所定の切替条件が成立していると判断した場合に、前記ステアリングレバーの操作に基づいて前記車体の屈曲角を算出し、当該車体の屈曲角が所定の閾値未満の場合に、前記制御モードを前記速度制御モードと前記位置制御モードのうち一方から他方に切り替える、ことを特徴とする。
【発明の効果】
【0008】
本発明によれば、オペレータが意図しないタイミングで位置制御モードと速度制御モードとが切り替わるのを防ぐことができる。なお、上記以外の課題、構成、及び、効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
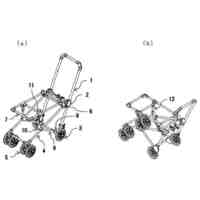
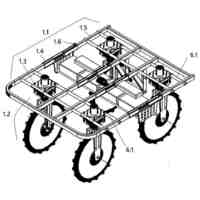
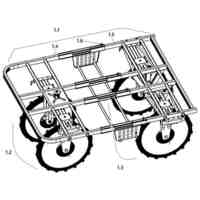
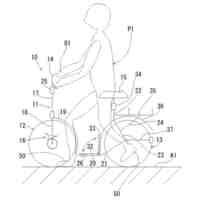
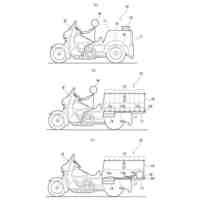
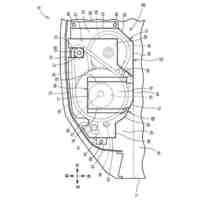
本発明の第1実施形態に係るホイールローダの側面図である。
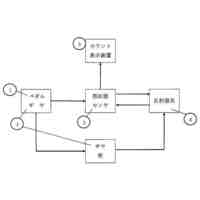
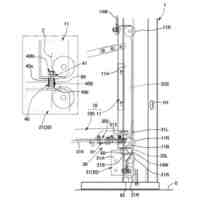
ホイールローダの油圧システムの全体構成図である。
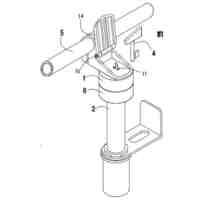
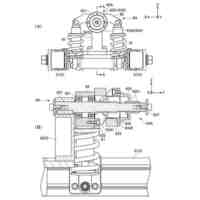
ハードウェア構成例を示す図である。
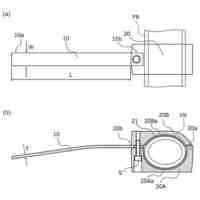
ステアリングホイールの操作量とパイロット圧の関係を示す図である。
ステアリングレバーの操作量と指令電流との関係を示す図である。
アクセルペダルの操作量と要求エンジン回転数の関係を示す図である。
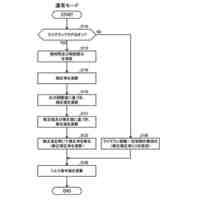
全体処理例を示すフローチャートである。
速度制御モード、及び、位置制御モードの例を示す図である。
切替フラグの設定処理例を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明に係る作業車両の例であるホイールローダの各実施形態について、図面を参照しながら説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
6日前
日立建機株式会社
作業車両
8日前
日立建機株式会社
作業機械管理システム及び作業機械
7日前
個人
カート
3か月前
個人
走行装置
4か月前
個人
電動走行車両
4か月前
個人
乗り物
5か月前
個人
発音装置
7か月前
個人
折り畳み自転車
10か月前
個人
閂式ハンドル錠
4か月前
個人
自転車用歩数計
7日前
個人
電動モビリティ
7か月前
個人
駐輪設備
1か月前
個人
自転車用傘捕捉具
11か月前
個人
ボギー・フレーム
2か月前
個人
ルーフ付きトライク
3か月前
個人
ルーフ付きトライク
1か月前
個人
三輪電動車両
7日前
個人
体重掛けリフト台車
11か月前
個人
自由方向乗車自転車
7か月前
個人
“zen-go.”
2か月前
個人
自転車用荷物台
11か月前
個人
キャンピングトライク
9か月前
個人
パワーアシスト自転車
2か月前
個人
アタッチメント
11か月前
個人
ステアリングの操向部材
9か月前
株式会社CPM
駐輪機
12か月前
株式会社三五
リアサブフレーム
10か月前
株式会社豊田自動織機
産業車両
4か月前
個人
フロントフットブレーキ。
4か月前
個人
乗用自動車のディフューザー
27日前
豊田鉄工株式会社
小型車両
3か月前
学校法人千葉工業大学
車両
10か月前
学校法人千葉工業大学
車両
10か月前
学校法人千葉工業大学
車両
10か月前
個人
ホイールハブ駆動構造
4か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ