TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025155170
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2024058767
出願日
2024-04-01
発明の名称
モータドライバ及び半導体装置
出願人
サンケン電気株式会社
代理人
個人
,
個人
主分類
H02P
6/18 20160101AFI20251006BHJP(電力の発電,変換,配電)
要約
【課題】正弦波駆動によるセンサレス制御を三相インバータに流れる電流を利用して実現できるモータドライバを提供する。
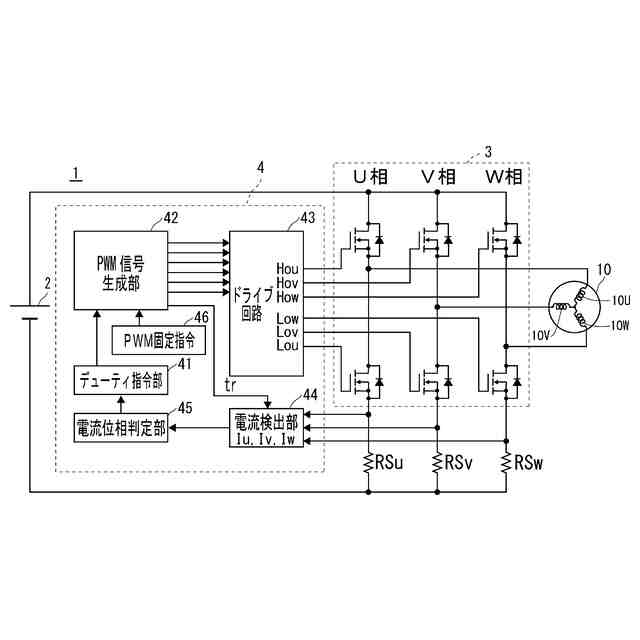
【解決手段】正弦波通電駆動用のPWM信号を生成すると共に、電気角の特定区間(30度から60度)はロータ位置推定期間として、特定の一相(W相)のPWM信号の生成を停止し、他の二相(U相、V相)のPWM信号を固定のデューティ比で生成するPWM信号生成部42と、ロータ位置推定期間にインバータ回路3に流れる電流に基づいて進み位相か遅れ位相かを判定する電流位相判定部45と、を備え、PWM信号生成部42は、電流位相判定部45による判定結果が進み位相である場合、PWM信号のデューティ比を増加させ、電流位相判定部45による判定結果が遅れ位相である場合、PWM信号のデューティ比を減少させる。
【選択図】図1
特許請求の範囲
【請求項1】
三相のブラシレスDCモータに電力を供給する三相インバータのスイッチング素子をPWM信号によってオンオフ制御するモータドライバであって、
正弦波通電駆動用の前記PWM信号を生成すると共に、電気角の特定区間はロータ位置推定期間として、三相の内の特定の一相の前記PWM信号の生成を停止し、他の二相の前記PWM信号を固定のデューティ比で生成するPWM信号生成部と、
前記ロータ位置推定期間に前記三相インバータに流れる電流に基づいて進み位相か遅れ位相かを判定する電流位相判定部と、を備え、
前記PWM信号生成部は、前記電流位相判定部による判定結果が前記進み位相である場合、前記PWM信号のデューティ比を増加させ、前記電流位相判定部による前記判定結果が前記遅れ位相である場合、前記PWM信号のデューティ比を減少させることを特徴とするモータドライバ。
続きを表示(約 430 文字)
【請求項2】
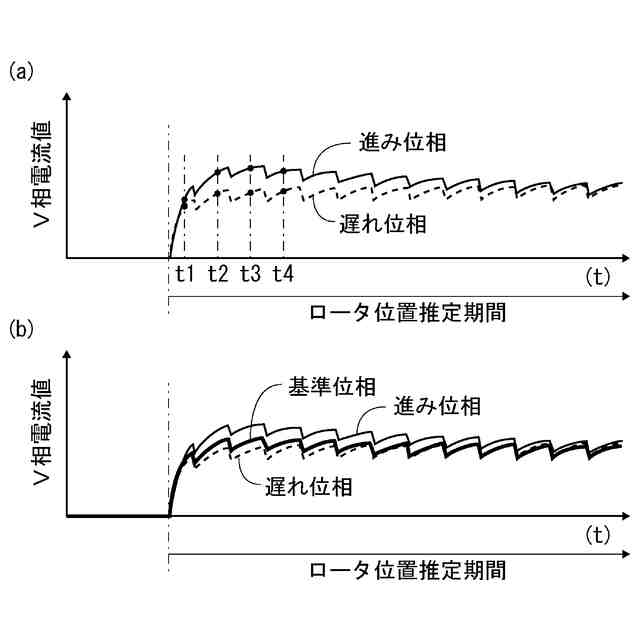
前記電流位相判定部は、前記三相インバータに流れる電流を前記PWM信号に同期した複数のタイミングで検出した電流検出値の電流偏差によって、前記進み位相か前記遅れ位相かを判定することを特徴とする請求項1に記載のモータドライバ。
【請求項3】
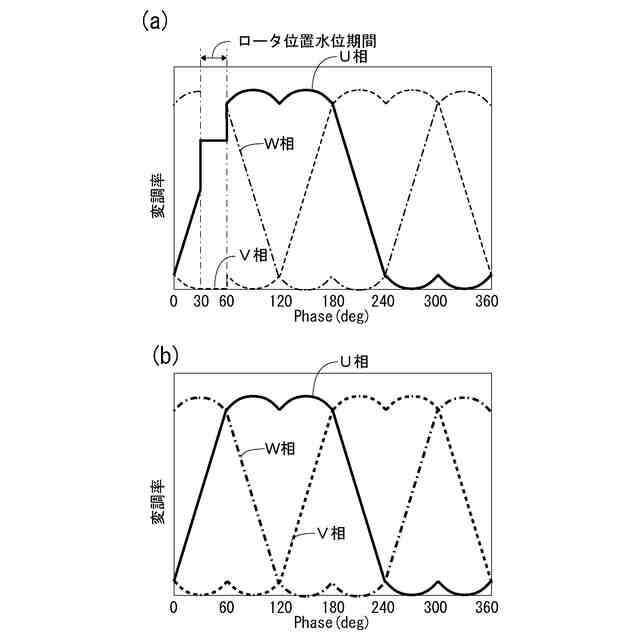
前記PWM信号のデューティ比を決定する正弦波駆動用のPWM制御信号における前記電気角の特定区間を、特定の二相のデューティ値を一定にした変形PWM制御信号を生成するデューティ指令部を備え、
前記デューティ指令部は、前記電流位相判定部による前記判定結果が前記進み位相である場合、前記変形PWM制御信号の振幅を大きくし、前記電流位相判定部による前記判定結果が前記遅れ位相である場合、前記変形PWM制御信号の振幅を小さくすることを特徴とする請求項1又は2に記載のモータドライバ。
【請求項4】
請求項1に記載のモータドライバが基板上に集積化されていることを特徴とする半導体装置。
発明の詳細な説明
【技術分野】
【0001】
本開示の実施の形態は、ブラシレスDCモータを駆動するモータドライバに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
BLDCモータの簡易型のセンサレス制御として、インバータ回路に流れる電流を利用してブラシレスDCモータの回転子位置を検出する技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2008-43083号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、逆起電力を検出するための回路が必要であると共に、無通電区間を60度程度必要とするため、正弦波駆動によるセンサレス制御の実現が難しかった。また、特許文献1には、正弦波駆動にも適用可能と記載されているが、具体的な制御方式は開示されていない。
【0005】
本開示は、正弦波駆動によるセンサレス制御を三相インバータに流れる電流を利用して実現できるモータドライバを提供する点にある。
【課題を解決するための手段】
【0006】
本開示のモータドライバは、三相のブラシレスDCモータに電力を供給する三相インバータのスイッチング素子をPWM信号によってオンオフ制御するモータドライバであって、
正弦波通電駆動用の前記PWM信号を生成すると共に、電気角の特定区間はロータ位置推定期間として、三相の内の特定の一相の前記PWM信号の生成を停止し、他の二相の前記PWM信号を固定のデューティ比で生成するPWM信号生成部と、前記ロータ位置推定期間に前記三相インバータに流れる電流に基づいて進み位相か遅れ位相かを判定する電流位相判定部と、を備え、前記PWM信号生成部は、前記電流位相判定部による判定結果が前記進み位相である場合、前記PWM信号のデューティ比を増加させ、前記電流位相判定部による前記判定結果が前記遅れ位相である場合、前記PWM信号のデューティ比を減少させることを特徴とする。
【発明の効果】
【0007】
本開示のモータドライバは、正弦波駆動によるセンサレス制御を三相インバータに流れる電流を利用して実現できる。
【図面の簡単な説明】
【0008】
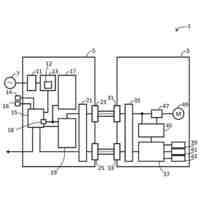
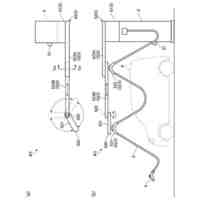
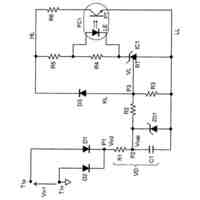
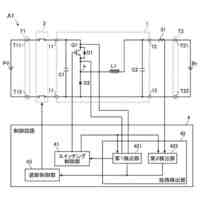
モータ駆動装置の実施の形態の構成を示す図である。
図1に示すデューティ指令部で生成される変形PWM制御信号を示す図である。
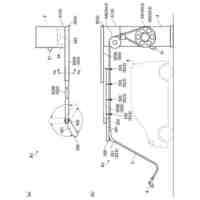
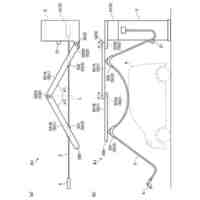
ロータ位置推定期間に流れるV相電流の経路を示す図である。
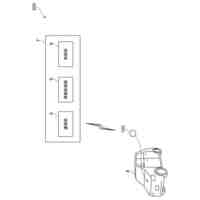
ロータ位置推定期間におけるV相電流値を示す図である。
【発明を実施するための形態】
【0009】
以下に、本発明の好適な実施の形態を添付図面に基づいて説明する。
【0010】
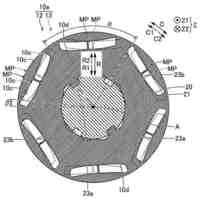
本実施の形態のモータ駆動装置1は、3相のブラシレスDCモータ10の駆動を制御する装置である。モータ駆動装置1は、図1を参照すると、直流電源2から供給される直流電圧を任意の周波数に変換することで、ブラシレスDCモータ10を駆動制御するインバータ回路3を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
サンケン電気株式会社
モータドライバ及び半導体装置
4日前
個人
単極モータ
4日前
株式会社アイシン
ロータ
4日前
株式会社アイシン
ロータ
8日前
西部電機株式会社
充電装置
11日前
西部電機株式会社
充電装置
11日前
日本精機株式会社
サージ保護回路
11日前
トヨタ自動車株式会社
回転子
15日前
トヨタ自動車株式会社
固定子
9日前
個人
連続ガウス加速器形磁力増幅装置
11日前
株式会社デンソー
回転機
2日前
トヨタ自動車株式会社
製造装置
9日前
株式会社アイシン
ステータ
8日前
カヤバ株式会社
筒型リニアモータ
10日前
個人
太陽エネルギー収集システム
9日前
株式会社ダイヘン
充電装置
8日前
株式会社アイシン
ステータ
8日前
株式会社アイシン
ステータ
8日前
株式会社ダイヘン
充電装置
8日前
株式会社ミツバ
ブラシレスモータ
10日前
株式会社ダイヘン
充電装置
8日前
東京瓦斯株式会社
通信装置
10日前
株式会社ダイヘン
充電装置
8日前
株式会社アイシン
ステータ
8日前
株式会社kaisei
発電システム
4日前
ニチコン株式会社
AC入力検出回路
15日前
トヨタ自動車株式会社
被膜形成装置
9日前
日産自動車株式会社
ステータ
16日前
株式会社デンソー
電力変換装置
15日前
株式会社ミツバ
回転電機
1日前
株式会社デンソー
電力変換装置
3日前
株式会社大林組
可搬式充電設備
16日前
ASTI株式会社
電力変換装置
9日前
株式会社ダイヘン
電力システム
11日前
株式会社ミツバ
回転電機
8日前
株式会社ダイヘン
電力変換装置
11日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ