TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025156847
公報種別
公開特許公報(A)
公開日
2025-10-15
出願番号
2024059566
出願日
2024-04-02
発明の名称
操舵制御装置
出願人
株式会社ジェイテクト
,
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B62D
6/00 20060101AFI20251007BHJP(鉄道以外の路面車両)
要約
【課題】車両の運転者に路面状態をより適切に伝えることができる操舵制御装置を提供する。
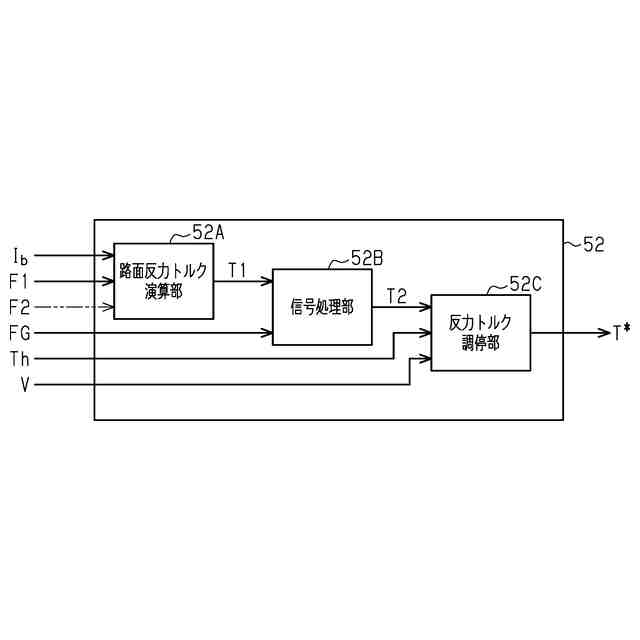
【解決手段】操舵制御装置は、反力制御部と転舵制御部とを有する。反力制御部は、路面状態を反映する第1の状態変数をステアリングホイールに対するトルクに換算することにより第1の路面反力トルクを演算する。反力制御部は、路面状態を反映する第2の状態変数をステアリングホイールに対するトルクに換算することにより第2の路面反力トルクを演算する。反力制御部は、第1の路面反力トルクと第2の路面反力トルクとを調停することにより基準路面反力トルクT1を演算する。反力制御部は、基準路面反力トルクT1を使用して操舵反力の目標値である反力トルク指令値T
*
を演算する。
【選択図】図3
特許請求の範囲
【請求項1】
車両の転舵輪との間の動力伝達が分離されたステアリングホイールに付与される操舵反力を発生する反力モータを制御するように構成される反力制御部と、
前記転舵輪を転舵させる転舵シャフトに付与される転舵力を発生する転舵モータを制御するように構成される転舵制御部と、を有し、
前記反力制御部は、
路面状態を反映する第1の状態変数を前記ステアリングホイールに対するトルクに換算することにより第1の路面反力トルクを演算する処理と、
路面状態を反映する第2の状態変数を前記ステアリングホイールに対するトルクに換算することにより第2の路面反力トルクを演算する処理と、
前記第1の路面反力トルクと前記第2の路面反力トルクとを調停することにより基準路面反力トルクを演算する処理と、
前記基準路面反力トルクを使用して前記操舵反力の目標値である反力トルク指令値を演算する処理と、を実行するように構成される操舵制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記第1の状態変数は、車載の軸力センサを通じて検出される前記転舵シャフトの軸力であり、
前記第2の状態変数は、車載の電流センサを通じて検出される前記転舵モータの電流の値に基づき演算される前記転舵モータのトルクであり、
前記反力制御部は、前記軸力センサと前記電流センサとが共に正常である場合には、前記第1の路面反力トルクを前記基準路面反力トルクとして設定し、前記軸力センサに異常が発生した場合には、前記第2の路面反力トルクを前記基準路面反力トルクとして設定するように構成される請求項1に記載の操舵制御装置。
【請求項3】
前記反力制御部は、
前記基準路面反力トルクに対して信号処理を施すことにより前記基準路面反力トルクから操舵感触に重要な周波数成分のみを抽出して最終路面反力トルクを演算する処理と、
演算される前記最終路面反力トルクを使用して前記反力トルク指令値を演算する処理と、を実行するように構成され、
前記周波数成分は、路面と前記転舵輪との間で発生する振動のうち、前記車両の運転者が路面状態あるいは路面に対する前記転舵輪のグリップ状態を認識するために必要とされる振動の周波数成分である請求項1または請求項2に記載の操舵制御装置。
【請求項4】
前記車両の運転モードは、前記ステアリングホイールが操舵される手動運転モードと、前記ステアリングホイールが操舵されない自動運転モードと、を有し、
前記反力制御部は、前記車両の運転モードが前記自動運転モードである場合、前記信号処理を実行しないように構成される請求項3に記載の操舵制御装置。
【請求項5】
前記反力制御部は、前記第1の路面反力トルクまたは前記第2の路面反力トルクの値が、定められた判定時間にわたってトルクしきい値を超えるとき、前記転舵輪の障害物当て、あるいは前記転舵シャフトのエンド当てが発生したと判定するように構成される請求項1または請求項2に記載の操舵制御装置。
【請求項6】
前記反力制御部は、前記第1の路面反力トルクと前記第2の路面反力トルクとの差の値が定められた許容範囲外の値であるとき、前記軸力センサおよび前記電流センサの少なくとも一方が異常であると判定するように構成される請求項2に記載の操舵制御装置。
【請求項7】
前記軸力センサは、
前記転舵シャフトの第1の端部に設けられるとともに、前記転舵シャフトの第1の軸力を検出するように構成される第1の軸力センサと、
前記転舵シャフトの第2の端部に設けられるとともに、前記転舵シャフトの第2の軸力を検出するように構成される第2の軸力センサと、を含む請求項2に記載の操舵制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操舵制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、ステアリングホイールと転舵輪との間の動力伝達を分離した、いわゆるステアバイワイヤ方式の操舵装置が知られている。この操舵装置は、ステアリングシャフトに付与される操舵反力の発生源である反力モータ、および転舵輪を転舵させる転舵力の発生源である転舵モータを有している。車両の走行時、操舵装置の制御装置は、反力モータを通じて操舵反力を発生させるとともに、転舵モータを通じて転舵輪を転舵させる。
【0003】
特許文献1の制御装置は、ステアリングホイールの操作に応じて転舵モータの駆動を制御する。制御装置は、たとえば、ステアリングホイールの操舵角に基づき目標転舵角を演算し、演算される目標転舵角に基づいて転舵電流を制御する。目標転舵角は、転舵モータの回転角の目標値である。転舵電流は、転舵モータに流れる電流である。
【0004】
制御装置は、ステアリングホイールの操作に応じて反力モータの駆動を制御する。制御装置は、転舵電流の検出信号に基づいて目標反力電流を演算し、演算される目標反力電流に基づいて反力電流を制御する。目標反力電流は、反力モータに対する電流指令値である。反力電流は、反力モータに流れる電流である。
【0005】
制御装置は、目標反力電流の演算に際して、転舵電流の検出信号から余計な信号を除外する処理を行う。制御装置は、バンドパスフィルタを有している。バンドパスフィルタは、転舵電流の検出信号から所定周波数以上の信号を抽出する。所定周波数は、路面に形成された轍などにより発生する低周波振動の周波数帯の上限である。すなわち、バンドパスフィルタは、転舵電流の検出信号から轍などに起因する低周波信号を除去する。
【0006】
轍などに起因する低周波信号が除去された転舵電流の検出信号は、路面の凹凸に起因する振動成分が主となる。したがって、路面の凹凸によって発生する振動を車両の運転者に伝達するとともに、轍などによる低周波振動が車両の運転者に伝わることを抑制することができる。車両の運転者は、ステアリングホイールを介した手応えによって、路面状態を認識することが可能である。
【先行技術文献】
【特許文献】
【0007】
特開2020-142704号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
操舵制御装置には、車両の運転者に路面状態をより適切に伝えることが求められる。
【課題を解決するための手段】
【0009】
上記課題を解決し得る操舵制御装置は、車両の転舵輪との間の動力伝達が分離されたステアリングホイールに付与される操舵反力を発生する反力モータを制御するように構成される反力制御部と、前記転舵輪を転舵させる転舵シャフトに付与される転舵力を発生する転舵モータを制御するように構成される転舵制御部と、を有する。前記反力制御部は、路面状態を反映する第1の状態変数を前記ステアリングホイールに対するトルクに換算することにより第1の路面反力トルクを演算する処理と、路面状態を反映する第2の状態変数を前記ステアリングホイールに対するトルクに換算することにより第2の路面反力トルクを演算する処理と、前記第1の路面反力トルクと前記第2の路面反力トルクとを調停することにより基準路面反力トルクを演算する処理と、前記基準路面反力トルクを使用して前記操舵反力の目標値である反力トルク指令値を演算する処理と、を実行するように構成される。
【0010】
この構成によれば、操舵反力の目標値である反力トルク指令値は、第1の路面反力トルクと第2の路面反力トルクとを調停した基準路面反力トルクを使用して演算される。このため、反力トルク指令値に応じた操舵反力をステアリングホイールに付与することにより、車両の運転者に路面状態に応じた適切な手応え感を与えることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カート
3か月前
個人
走行装置
3か月前
個人
乗り物
5か月前
個人
電動走行車両
3か月前
個人
駐輪設備
1か月前
個人
閂式ハンドル錠
3か月前
個人
自転車用歩数計
2日前
個人
折り畳み自転車
10か月前
個人
発音装置
7か月前
個人
電動モビリティ
7か月前
個人
ボギー・フレーム
1か月前
個人
自転車用傘捕捉具
11か月前
個人
三輪電動車両
2日前
個人
体重掛けリフト台車
11か月前
個人
ルーフ付きトライク
1か月前
個人
“zen-go.”
2か月前
個人
ルーフ付きトライク
2か月前
個人
自由方向乗車自転車
7か月前
個人
自転車用荷物台
11か月前
個人
パワーアシスト自転車
1か月前
個人
アタッチメント
11か月前
個人
キャンピングトライク
8か月前
株式会社CPM
駐輪機
11か月前
個人
ステアリングの操向部材
9か月前
株式会社三五
リアサブフレーム
10か月前
株式会社豊田自動織機
産業車両
4か月前
個人
フロントフットブレーキ。
4か月前
個人
乗用自動車のディフューザー
22日前
個人
ホイールハブ駆動構造
4か月前
豊田鉄工株式会社
小型車両
3か月前
学校法人千葉工業大学
車両
10か月前
豊田合成株式会社
操舵装置
12か月前
学校法人千葉工業大学
車両
10か月前
学校法人千葉工業大学
車両
10か月前
個人
ハブモーターの配線構造
28日前
株式会社オカムラ
搬送用什器
7か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ