TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024094749
公報種別
公開特許公報(A)
公開日
2024-07-10
出願番号
2022211494
出願日
2022-12-28
発明の名称
ノロ取りシステム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
F27D
3/15 20060101AFI20240703BHJP(炉,キルン,窯;レトルト)
要約
【課題】ノロ判定の精度の高いノロ取りシステムを提供する。
【解決手段】ノロ取りシステム10は、可視カメラ11と、溶湯16の表面でノロ取りを実行するロボット13と備える。ノロ取りシステム10は、可視カメラ11で溶湯16の表面の写真19を取得し、写真19をタイル分割するとともに、これらタイルに対して学習済みモデル18に基づいてクラス分類を実行し、クラス分類されたタイルがノロ17を捉えているかを判定し、ノロ17を捉えたタイルが所定枚数よりも多い時にロボット13を起動し、ノロ17を捉えたタイルが所定枚数以下になるまで一連の作業を繰り返す。ノロ取りシステム10は、サーモグラフィー12をさらに備える。ノロ取りシステム10は、写真19の取得に加えてサーモグラフィー12でサーモ画像20を取得する。ノロ取りシステム10は、タイルを判定する時、サーモ画像20を加味する。
【選択図】図1
特許請求の範囲
【請求項1】
可視カメラと、溶湯表面でノロ取りを実行するロボットと備え、
前記可視カメラで溶湯表面の写真を取得し、
前記写真をタイル分割するとともに、これらタイルに対して畳み込み型ニューラルネットワーク(CNN)からなる学習済みモデルに基づいてクラス分類を実行し、
クラス分類された前記タイルがノロを捉えているかを判定し、
ノロを捉えたタイルが所定枚数よりも多い時に前記ロボットを起動し、
ノロを捉えたタイルが所定枚数以下になるまで一連の作業を繰り返す、
ノロ取りシステムであって、
サーモグラフィーをさらに備え、
前記写真の取得に加えて前記サーモグラフィーでサーモ画像を取得し、
前記タイルを判定する時、前記サーモ画像を加味することで前記溶湯表面に映った影がノロとして捉えられた前記タイルを排除する、
ノロ取りシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明はノロ取りシステムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1は溶湯の表面のノロを産業用ロボットのフィンガーで除去することを開示している。特許文献2はニューラルネットワークを用いた学習済みモデルに基づいて、溶湯表面の画像からスラグの発生の有無の判定及びスラグ発生位置の特定を行うことを開示している。特許文献3は転炉の出鋼口から取鍋に向けて排出される排出流の赤外線画像に基づき、排出流へのスラグ混入の有無を判定することを開示している。特許文献3では畳み込み型ニューラルネットワーク(CNN)を用いた学習済みモデルで画像を解析する。
【先行技術文献】
【特許文献】
【0003】
特開2018-179348号公報
特開2020-085395号公報
特開2022-124231号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明はその一態様においてノロ判定の精度の高いノロ取りシステムを提供する。
【課題を解決するための手段】
【0005】
カメラと、溶湯表面でノロ取りを実行するロボットと備え、
前記カメラで溶湯表面の写真を取得し、
前記写真をタイル分割するとともに、前記タイルを畳み込み型ニューラルネットワーク(CNN)からなる学習済みモデルに基づいてクラス分類を実行し、
クラス分類された前記タイルがノロを捉えているかを判定し、
ノロを捉えたタイルが所定枚数よりも多い時に前記ロボットを起動し、
ノロを捉えたタイルが所定枚数以下になるまで一連の作業を繰り返す、
ノロ取りシステムであって、
前記写真の取得に加えてサーモグラフィーでサーモ画像を取得し、
前記タイルを判定する時、前記サーモ画像を加味することで前記溶湯表面に映った影がノロとして捉えられた前記タイルを排除する、
ノロ取りシステム。
【発明の効果】
【0006】
本発明はその一態様においてノロ判定の精度の高いノロ取りシステムを提供する。
【図面の簡単な説明】
【0007】
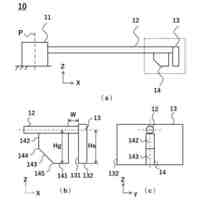
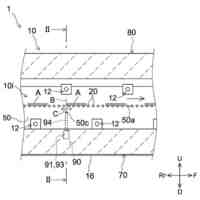
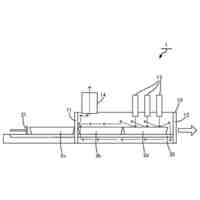
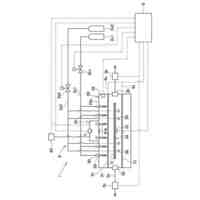
システムのブロック図
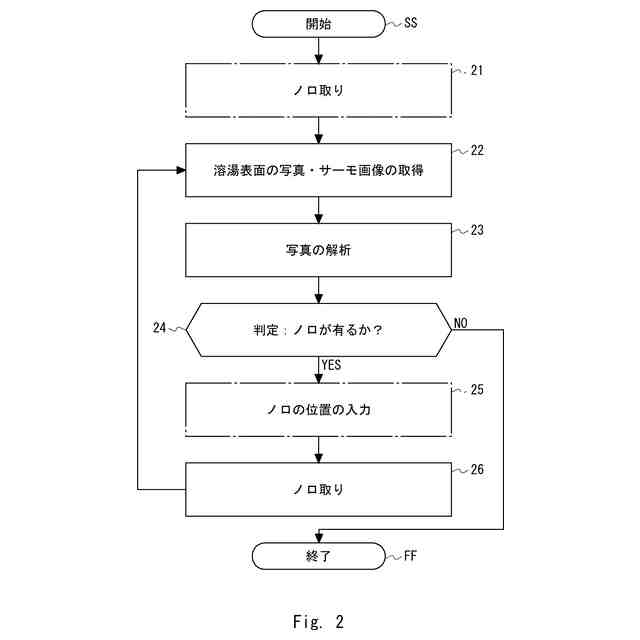
システムの動作の流れ図
タイル化された写真(上段)及び可視化されたクラス分類(下段)
【発明を実施するための形態】
【0008】
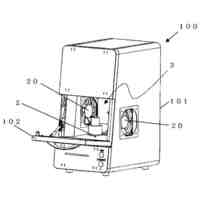
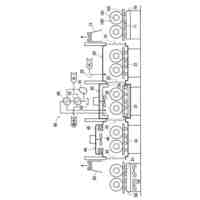
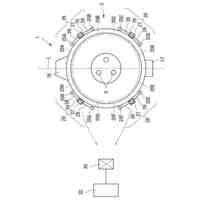
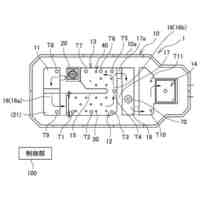
図1はノロ取り用のシステム10のブロック図を示す。システム10は溶解炉15からノロを取るシステムである。システム10は可視カメラ11、サーモグラフィー12、ロボット13及びコントローラー14とを備える。溶解炉15はその内部に溶湯16を蓄えている。溶湯16になっている金属の種類は特に限定されず、例えばアルミニウムである。溶湯16の表面は鏡面になっており、溶解炉15周辺の物体の影を反射しやすい。また溶湯16の表面にはノロ17(スラグ)の生じることがある。
【0009】
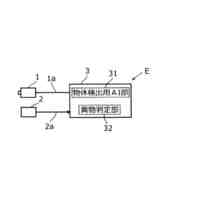
図1に示すコントローラー14は学習済みモデル18を記憶している。コントローラー14は学習済みモデル18を必要な時に不図示のネットワークを通じてダウンロードしてもよい。学習済みモデル18は畳み込み型ニューラルネットワーク(CNN)より作成する。畳み込み型ニューラルネットワーク(CNN)の例はEfficientNetである。学習済みモデル18はオリジナルの学習済みモデルに対する転移学習、蒸留及びファインチューニング並びにこれらのいずれか2つ以上の組み合わせのいずれかにより得られたものでもよい。学習済みモデル18はオリジナルの学習済みモデルでもよい。
【0010】
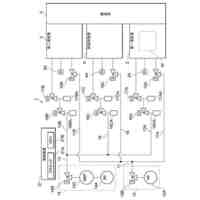
図2はシステムの動作のフローチャートを示す。ステップ21は任意に導入されるステップであり、後述する。ステップ22にて図1に示す可視カメラ11は溶湯16の表面の写真19を得る。一態様において可視カメラ11はイメージセンサーで可視光を検出することで写真19を生成する。サーモグラフィー12は溶湯16の表面のサーモ画像20を得る。図1には可視カメラ11の捉えた写真19の画角が一点鎖線で表されている。写真19には溶湯16の表面と、ノロ17が映っている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
屑鉄の大量溶解装置
9か月前
キヤノン電子株式会社
焼成炉
9か月前
東京窯業株式会社
セッター
1か月前
株式会社プロテリアル
スラグ除滓装置
6か月前
中外炉工業株式会社
処理炉
4日前
サンファーネス株式会社
熱処理炉
9か月前
ノリタケ株式会社
連続加熱炉
9か月前
ノリタケ株式会社
連続加熱炉
9か月前
ノリタケ株式会社
連続加熱炉
9か月前
ノリタケ株式会社
連続加熱炉
2か月前
ファーネス重工株式会社
熱風循環炉
2か月前
株式会社不二越
搬送システム
1か月前
ノリタケ株式会社
連続加熱炉
2か月前
ノリタケ株式会社
連続加熱炉
9か月前
ノリタケ株式会社
連続加熱炉
2か月前
ノリタケ株式会社
熱処理装置
1か月前
中外炉工業株式会社
連続式熱処理炉
11か月前
ノリタケ株式会社
サヤ
9日前
特殊電極株式会社
インゴット予熱装置
1か月前
中外炉工業株式会社
連続処理炉
1か月前
DiV株式会社
赤外線加熱装置
1か月前
成都大学
合金粉末酸化防止熱処理装置
3か月前
大同特殊鋼株式会社
溶解炉
7か月前
三菱重工業株式会社
炉設備
3か月前
株式会社不二越
圧力制御システム
1か月前
トヨタ自動車株式会社
ノロ取りシステム
11か月前
三建産業株式会社
非鉄金属溶解方法
29日前
大同特殊鋼株式会社
坩堝スカムの除去方法
9か月前
大同特殊鋼株式会社
回転炉の異物検出装置
1か月前
大同特殊鋼株式会社
熱処理炉
10か月前
ノリタケ株式会社
ロータリーキルン
8か月前
ノリタケ株式会社
ロータリーキルン
9か月前
大同特殊鋼株式会社
熱処理設備
1か月前
住友金属鉱山株式会社
水冷ジャケット
8か月前
大同特殊鋼株式会社
熱処理設備
5か月前
中外炉工業株式会社
亜鉛回収装置
8か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ