TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025038383
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023144966
出願日
2023-09-07
発明の名称
システム及びロボット
出願人
株式会社安川電機
代理人
弁理士法人RYUKA国際特許事務所
主分類
H01L
21/677 20060101AFI20250312BHJP(基本的電気素子)
要約
【課題】コストを増加させることなく効率的な搬送を行うことができる搬送システム、ロボット及びロボットの制御方法を提供する。
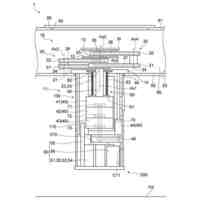
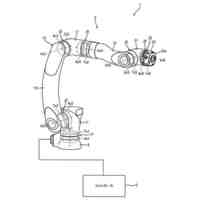
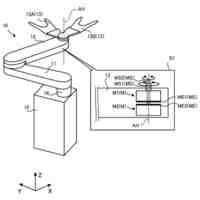
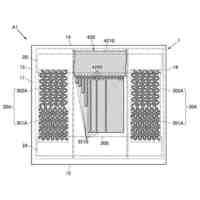
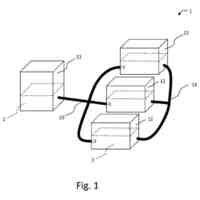
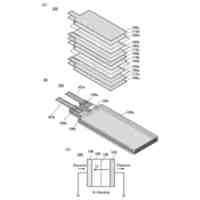
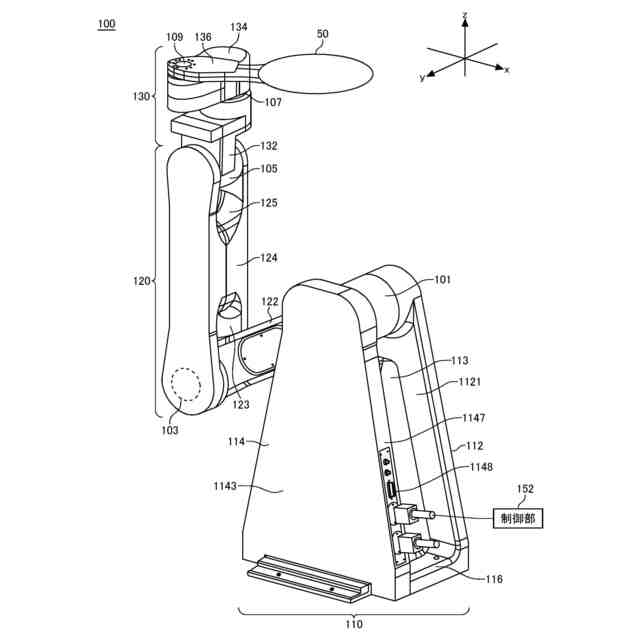
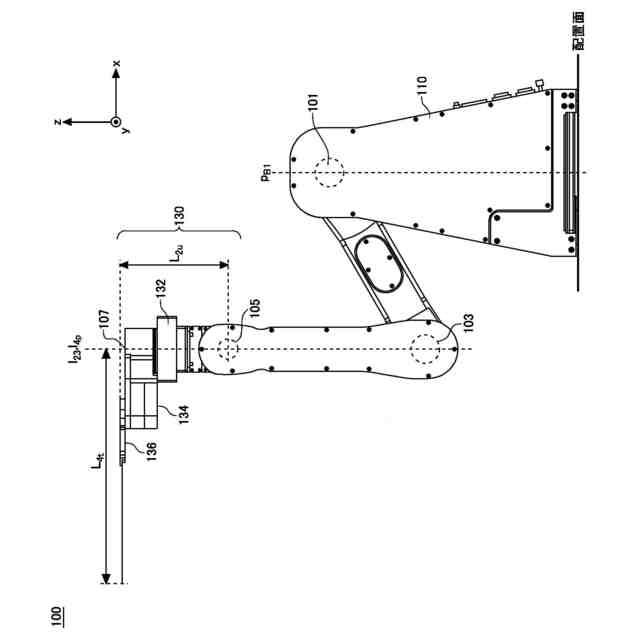
【解決手段】搬送システムにおいて、ウェハ50を格納するカセットへのアクセスのための複数の開口部を含む正面壁と、正面壁に対向する背面壁とを有する筐体と、筐体に配置されるロボット100であって、第1ベース110と、第1可動部120と、ウェハを保持するハンド136を有する第2可動部130と、ハンドが水平面と平行な状態でハンドに複数の開口部のそれぞれへアクセスさせるように、第1可動部及び第2可動部を制御する制御部とを有し、複数の開口部は、ロボットが筐体に配置される位置と、第1可動部を最大に伸長させた状態の第1可動部の長さと、第2可動部を最大に伸長させた状態の第2可動部の長さとに基づいて定められた、ハンドの最大アクセス可能領域内に位置する。
【選択図】図1
特許請求の範囲
【請求項1】
ウェハを格納するカセットへのアクセスのための複数の開口部を含む正面壁と、前記正面壁に対向する背面壁とを有する筐体と、
前記筐体に配置されるロボットと
を備え、
前記ロボットは、
第1ベースと、
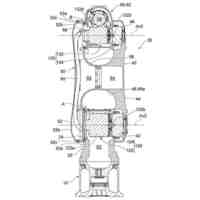
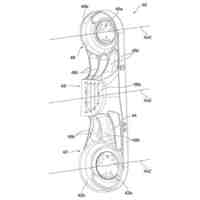
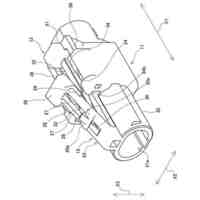
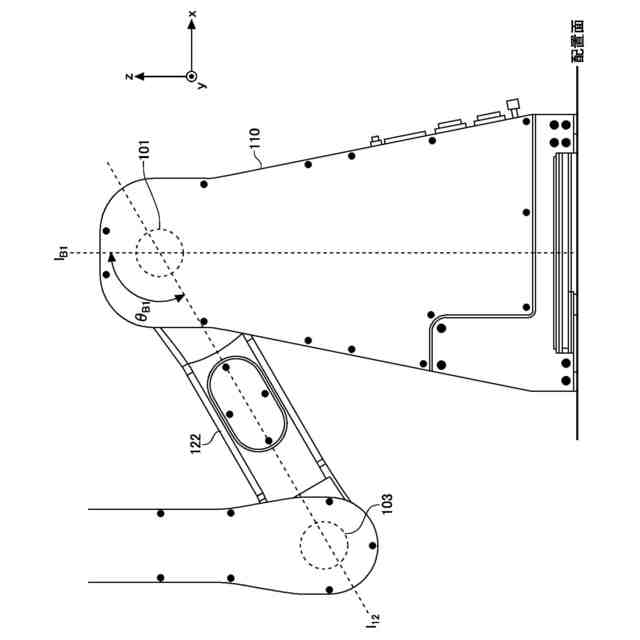
前記第1ベースに対して基端側が第1回転軸を中心に垂直面内で回転可能に連結されている第1アームと、前記第1アームの先端側に対して基端側が第2回転軸を中心に垂直面内で回転可能に連結されている第2アームとを有する第1可動部と、
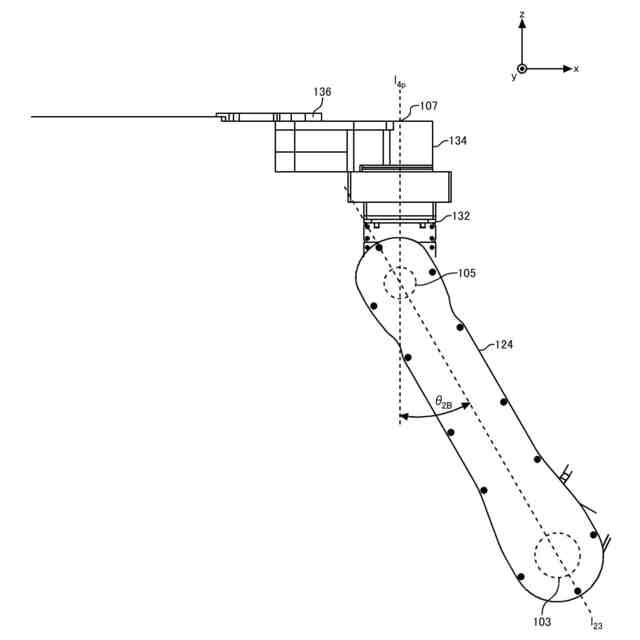
前記第2アームの先端側に対して基端側が第3回転軸を中心に垂直面内で回転可能に連結されている第2ベースと、前記第2ベースの先端側に対して基端側が第4回転軸を中心に回転可能に連結されている第3アームと、前記第3アームの先端側に対して基端側が第5回転軸を中心に回転可能に連結され、前記ウェハを保持するハンドとを有する第2可動部と、
前記ハンドが水平面と平行な状態で前記ハンドに前記複数の開口部のそれぞれへアクセスさせるように、前記第1可動部及び前記第2可動部を制御する制御部と
を有し、
前記複数の開口部は、前記ロボットが前記筐体に配置される位置と、前記第1可動部を最大に伸長させた状態の前記第1可動部の長さと、前記第2可動部を最大に伸長させた状態の前記第2可動部の長さとに基づいて定められた、前記ハンドの最大アクセス可能領域内に位置する、
システム。
続きを表示(約 1,100 文字)
【請求項2】
前記第2可動部を最大に伸長させた状態の前記第2可動部の長さは、前記第3アーム及び前記ハンドが水平面と平行な状態で前記第3アーム及び前記ハンドを最大に伸長させたときの前記第4回転軸から前記ハンドの先端までの長さである、請求項1に記載のシステム。
【請求項3】
前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に伸長させた状態における、前記第3回転軸を回転させたときの前記第2可動部の可動域にさらに基づいて定められている、請求項1に記載のシステム。
【請求項4】
前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に屈曲させた状態における、前記第3回転軸を回転させたときの前記第2可動部の可動域にさらに基づいて定められている、請求項1に記載のシステム。
【請求項5】
前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に伸長させた状態における、前記第4回転軸を回転させたときの前記第3アームと前記ハンドの可動域にさらに基づいて定められている、請求項1に記載のシステム。
【請求項6】
前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に屈曲させた状態における、前記第4回転軸を回転させたときの前記第3アームと前記ハンドの可動域にさらに基づいて定められている、請求項1に記載のシステム。
【請求項7】
前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に伸長させた状態における、前記第5回転軸を回転させたときの前記ハンドの可動域にさらに基づいて定められている、請求項1に記載のシステム。
【請求項8】
前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に屈曲させた状態における、前記第5回転軸を回転させたときの前記ハンドの可動域にさらに基づいて定められている、請求項1に記載のシステム。
【請求項9】
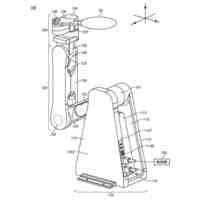
前記ハンドの前記最大アクセス可能領域は、前記第2回転軸及び前記第3回転軸を通り且つ前記第2回転軸及び前記第3回転軸に対して垂直である直線と平行なベクトルが、前記第1ベースの配置面に対して垂直であり、且つ、前記第4回転軸と平行である状態における、前記第3回転軸から前記第2可動部の上端までの長さにさらに基づいて定められている、請求項1に記載のシステム。
【請求項10】
前記ハンドの前記最大アクセス可能領域は、前記第3回転軸の高度が前記第1回転軸の高度より高い状態での前記ハンドの上方アクセス可能領域と、前記第3回転軸の高度が前記第1回転軸の高度より低い状態での前記ハンドの下方アクセス可能領域とを含む、請求項9に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、システム及びロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、コストを増加させることなく効率的な搬送を行うことができる搬送システム、ロボット及びロボットの制御方法が記載されている。
[先行技術文献]
[特許文献]
[特許文献1]特許第6492271号公報
【発明の概要】
【0003】
本発明の一実施態様によれば、システムが提供される。前記システムは、ウェハを格納するカセットへのアクセスのための複数の開口部を含む正面壁と、前記正面壁に対向する背面壁とを有する筐体を備えてよい。前記システムは、前記筐体に配置されるロボットを備えてよい。前記ロボットは、第1ベースと、前記第1ベースに対して基端側が第1回転軸を中心に垂直面内で回転可能に連結されている第1アームと、前記第1アームの先端側に対して基端側が第2回転軸を中心に垂直面内で回転可能に連結されている第2アームとを有する第1可動部と、前記第2アームの先端側に対して基端側が第3回転軸を中心に垂直面内で回転可能に連結されている第2ベースと、前記第2ベースの先端側に対して基端側が第4回転軸を中心に回転可能に連結されている第3アームと、前記第3アームの先端側に対して基端側が第5回転軸を中心に回転可能に連結され、前記ウェハを保持するハンドとを有する第2可動部と、前記ハンドが水平面と平行な状態で前記ハンドに前記複数の開口部のそれぞれへアクセスさせるように、前記第1可動部及び前記第2可動部を制御する制御部とを有してよい。前記複数の開口部は、前記ロボットが前記筐体に配置される位置と、前記第1可動部を最大に伸長させた状態の前記第1可動部の長さと、前記第2可動部を最大に伸長させた状態の前記第2可動部の長さとに基づいて定められた、前記ハンドの最大アクセス可能領域内に位置してよい。
【0004】
前記システムにおいて、前記第2可動部を最大に伸長させた状態の前記第2可動部の長さは、前記第3アーム及び前記ハンドが水平面と平行な状態で前記第3アーム及び前記ハンドを最大に伸長させたときの前記第4回転軸から前記ハンドの先端までの長さであってよい。
【0005】
前記いずれかのシステムにおいて、前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に伸長させた状態における、前記第3回転軸を回転させたときの前記第2可動部の可動域にさらに基づいて定められていてよい。
【0006】
前記いずれかのシステムにおいて、前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に屈曲させた状態における、前記第3回転軸を回転させたときの前記第2可動部の可動域にさらに基づいて定められていてよい。
【0007】
前記いずれかのシステムにおいて、前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に伸長させた状態における、前記第4回転軸を回転させたときの前記第3アームと前記ハンドの可動域にさらに基づいて定められていてよい。
【0008】
前記いずれかのシステムにおいて、前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に屈曲させた状態における、前記第4回転軸を回転させたときの前記第3アームと前記ハンドの可動域にさらに基づいて定められていてよい。
【0009】
前記いずれかのシステムにおいて、前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に伸長させた状態における、前記第5回転軸を回転させたときの前記ハンドの可動域にさらに基づいて定められていてよい。
【0010】
前記いずれかのシステムにおいて、前記ハンドの前記最大アクセス可能領域は、前記第1可動部を最大に屈曲させた状態における、前記第5回転軸を回転させたときの前記ハンドの可動域にさらに基づいて定められていてよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
2日前
株式会社安川電機
ロボット
2日前
株式会社安川電機
ロボット
2日前
株式会社安川電機
ロボット
2日前
株式会社安川電機
ロボット及びシステム
2か月前
株式会社安川電機
システム及びロボット
2か月前
株式会社安川電機
ロボット、ロボットの製造方法
4日前
株式会社安川電機
ロボット、ロボットの製造方法
4日前
株式会社安川電機
制御装置及び制御装置の冷却方法
1か月前
株式会社安川電機
ロボットシステム、コントローラ及び制御方法
1か月前
株式会社安川電機
ロボットシステム、ロボット、ロボットの制御方法
18日前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
2日前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
2日前
株式会社安川電機
搬送ロボットおよびロボットシステム
1か月前
株式会社東光高岳
変圧器
16日前
株式会社電知
組電池の製造方法
2日前
株式会社東光高岳
変圧器
16日前
ローム株式会社
チップ部品
19日前
株式会社コロナ
タッチ式操作装置
5日前
株式会社GSユアサ
蓄電装置
2日前
CKD株式会社
倣い装置
12日前
トヨタ自動車株式会社
二次電池
8日前
ローム株式会社
半導体装置
10日前
株式会社不二越
ソレノイド
11日前
株式会社不二越
ソレノイド
1日前
株式会社ダイヘン
ヒューズ
5日前
株式会社ダイヘン
搬送装置
8日前
株式会社半導体エネルギー研究所
二次電池
2日前
富士電機株式会社
半導体装置
12日前
CKD株式会社
傾き調整装置
12日前
トヨタ自動車株式会社
電池昇温装置
12日前
日本圧着端子製造株式会社
コネクタ
17日前
SMK株式会社
コネクタの取付構造
12日前
ニチコン株式会社
コンデンサ
18日前
新電元工業株式会社
磁性部品
19日前
新電元工業株式会社
磁性部品
19日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ