TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085520
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199450
出願日
2023-11-24
発明の名称
アキシャルギャップモータ、ロボット、ロボットシステム
出願人
株式会社安川電機
代理人
弁理士法人第一テクニカル国際特許事務所
主分類
H02K
21/24 20060101AFI20250529BHJP(電力の発電,変換,配電)
要約
【課題】アキシャルギャップモータのコギングトルクを効果的に低減する。
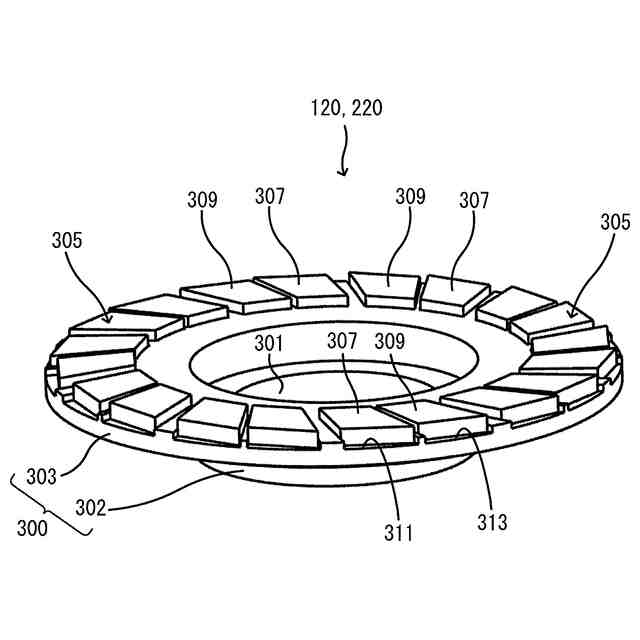
【解決手段】第1モータ101及び第2モータ201は、回転軸AX3を中心に回転するロータ120,220と、ロータ120,220と回転軸AX3の方向に対向するステータ110,210と、ロータ120,220に備えられたバックヨーク部303と、バックヨーク部303に回転軸AX3周りの周方向に沿って配置された複数の磁石305と、を有し、複数の磁石305は、周方向に等角度間隔で配置された複数の第1磁石307と、複数の第1磁石307の相互間に1つずつ配置され、周方向に隣接する2つの第1磁石307の中心角度から所定のシフト角θ1だけずれた位置に配置された複数の第2磁石309と、を有する。
【選択図】図7
特許請求の範囲
【請求項1】
回転軸を中心に回転するロータと、
前記ロータと前記回転軸の方向に対向するステータと、
前記ロータ及び前記ステータのいずれか一方に備えられた第1バックヨークと、
前記第1バックヨークに前記回転軸周りの周方向に沿って配置された複数の磁石と、を有し、
前記複数の磁石は、
前記周方向に等角度間隔で配置された複数の第1磁石と、
前記複数の第1磁石の相互間に1つずつ配置され、前記周方向に隣接する2つの前記第1磁石の中心角度から所定の第1角度だけずれた位置に配置された複数の第2磁石と、を有する、
アキシャルギャップモータ。
続きを表示(約 970 文字)
【請求項2】
前記第1角度をθ、前記ステータのスロット数と前記ロータの極数との最小公倍数をLCMとした場合に、
θ≦(360°/LCM)/2
である、請求項1に記載のアキシャルギャップモータ。
【請求項3】
前記第1磁石及び前記第2磁石は、
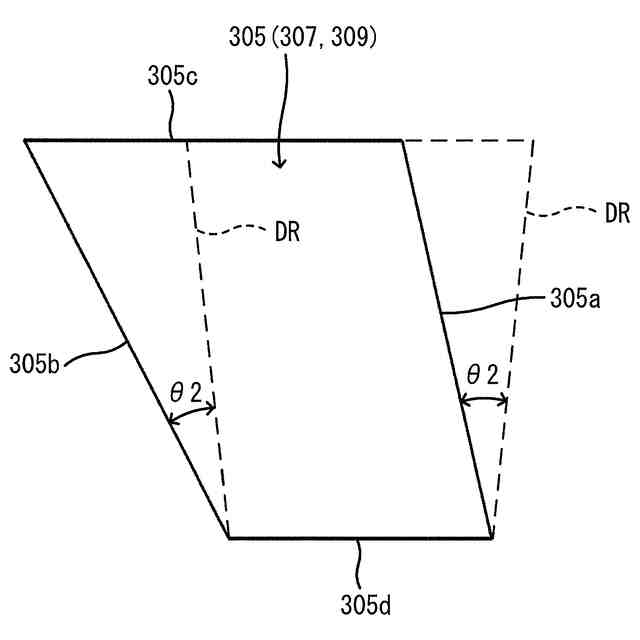
前記周方向における一方側の辺及び他方側の辺が、前記回転軸を中心とする径方向に対して同じ方向に所定の第2角度だけ傾斜した形状である、
請求項1又は2に記載のアキシャルギャップモータ。
【請求項4】
前記第1角度をθ、前記ステータのスロット数と前記ロータの極数との最小公倍数をLCMとした場合に、
θ<(360°/LCM)/2
である、請求項3に記載のアキシャルギャップモータ。
【請求項5】
θ≧0.75×{(360°/LCM)/2}
の場合に、前記ロータを前記回転軸周りに回転した場合に前記ロータと前記ステータとの間で生じるコギングトルクの値が、前記θが(360°/LCM)/2である場合の前記コギングトルクの値以下となる、
請求項4に記載のアキシャルギャップモータ。
【請求項6】
前記θは、
0.875×{(360°/LCM)/2}
の近傍である、請求項5に記載のアキシャルギャップモータ。
【請求項7】
前記複数の第1磁石及び前記複数の第2磁石は、
互いに同じ形状である、請求項5に記載のアキシャルギャップモータ。
【請求項8】
前記複数の第1磁石及び前記複数の第2磁石は、
前記径方向における外側の辺及び内側の辺が平行な形状を有する、請求項5に記載のアキシャルギャップモータ。
【請求項9】
前記第1磁石と前記第2磁石の間の隙間形状は、前記周方向に隣接する前記隙間形状と、相互に非相似形状且つ前記回転軸周りに回転させても一致しない形状である、
請求項1又は2に記載のアキシャルギャップモータ。
【請求項10】
前記最小公倍数は、
前記極数の6倍以上である、
請求項2に記載のアキシャルギャップモータ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
開示の実施形態は、アキシャルギャップモータ、ロボット、及びロボットシステムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、回転子と固定子がアキシャルエアギャップを介して設けられた扁平形回転電機において、磁極を形成する永久磁石をスキューを持たせた形状とすることにより、コギングトルクの小さい円滑な運転を行うことを可能とした扁平形回転電機が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開昭58-222766号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、コギングトルクを十分に低減できない場合があり、コギングトルクをより効果的に低減することができるモータが求められていた。
【0005】
本発明はこのような問題点に鑑みてなされたものであり、コギングトルクを効果的に低減することができるアキシャルギャップモータ、ロボット、及びロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の一の観点によれば、回転軸を中心に回転するロータと、前記ロータと前記回転軸の方向に対向するステータと、前記ロータ及び前記ステータのいずれか一方に備えられた第1バックヨークと、前記第1バックヨークに前記回転軸周りの周方向に沿って配置された複数の磁石と、を有し、前記複数の磁石は、前記周方向に等角度間隔で配置された複数の第1磁石と、前記複数の第1磁石の相互間に1つずつ配置され、前記周方向に隣接する2つの前記第1磁石の中心角度から所定の第1角度だけずれた位置に配置された複数の第2磁石と、を有する、アキシャルギャップモータが適用される。
【0007】
また、本発明の別の観点によれば、アキシャルギャップモータを関節部に配置したロボットであって、前記アキシャルギャップモータは、回転軸を中心に回転するロータと、前記ロータと前記回転軸の方向に対向するステータと、前記ロータ及び前記ステータのいずれか一方に備えられた第1バックヨークと、前記第1バックヨークに前記回転軸周りの周方向に沿って配置された複数の磁石と、を有し、前記複数の磁石は、前記周方向に等角度間隔で配置された複数の第1磁石と、前記第1磁石の相互間に1つずつ配置され、前記周方向に隣接する2つの前記第1磁石の中心角度から所定の第1角度だけずれた位置に配置された複数の第2磁石と、を有する、ロボットが適用される。
【0008】
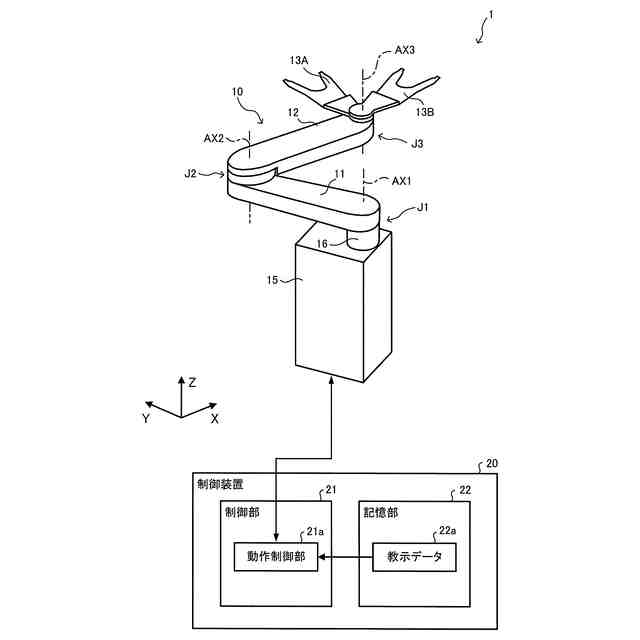
また、本発明の別の観点によれば、上記ロボットと、前記ロボットの動作を制御する制御装置と、を有する、ロボットシステムが適用される。
【発明の効果】
【0009】
本発明のアキシャルギャップモータ等によれば、コギングトルクを効果的に低減することができる。
【図面の簡単な説明】
【0010】
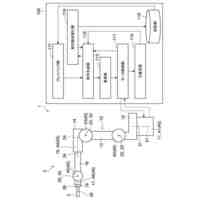
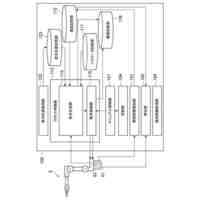
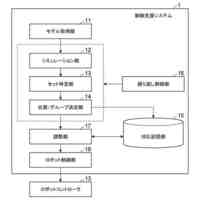
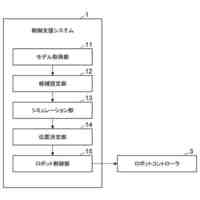
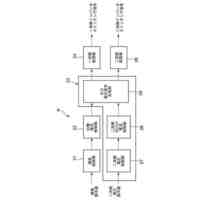
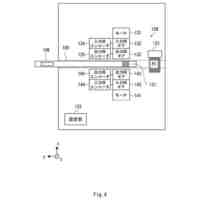
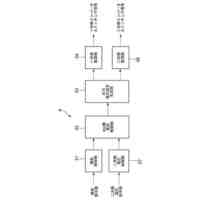
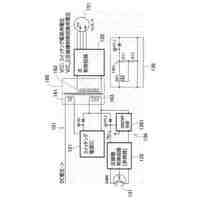
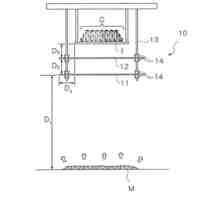
実施形態に係るロボットシステムの全体構成の一例を表す図である。
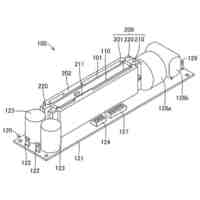
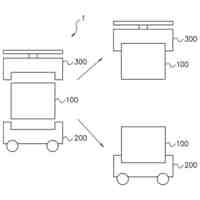
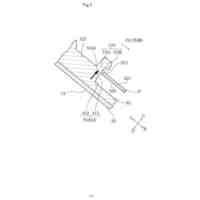
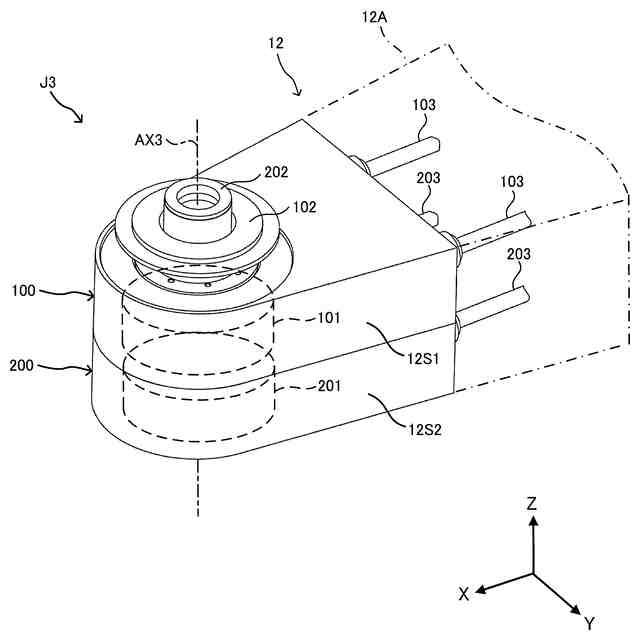
第2アームの先端部分に備えられた第1モータユニット及び第2モータユニットの外観構成の一例を表す斜視図である。
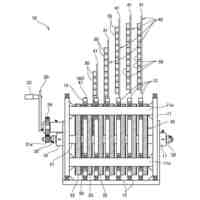
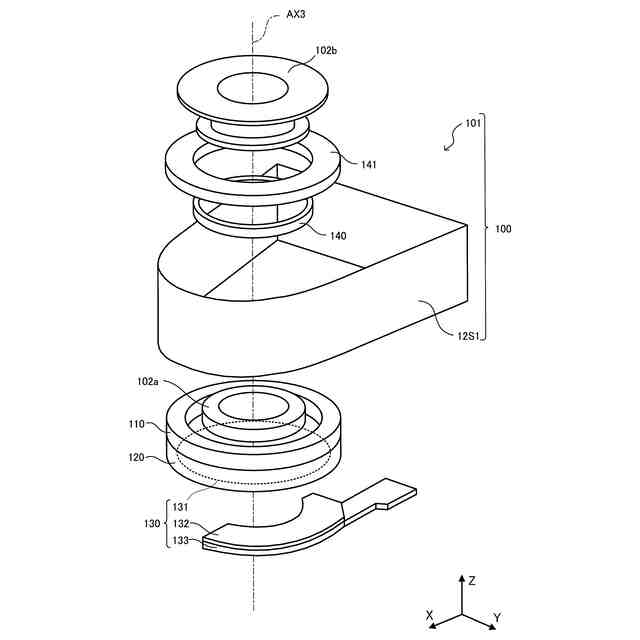
第1モータユニットの内部構成の一例を表す分解斜視図である。
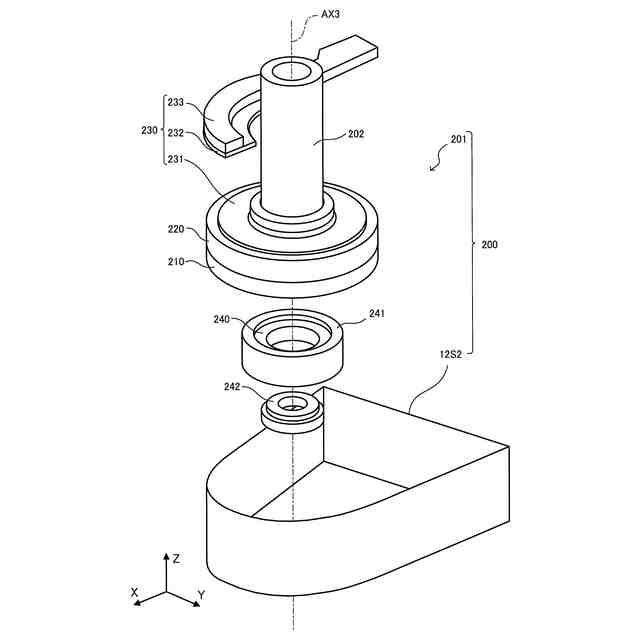
第2モータユニットの内部構成の一例を表す分解斜視図である。
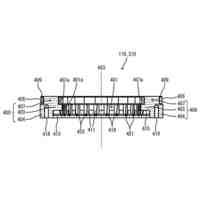
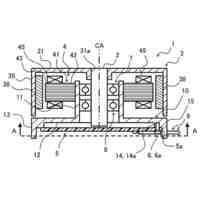
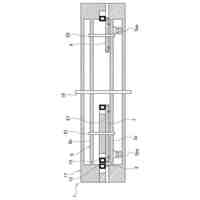
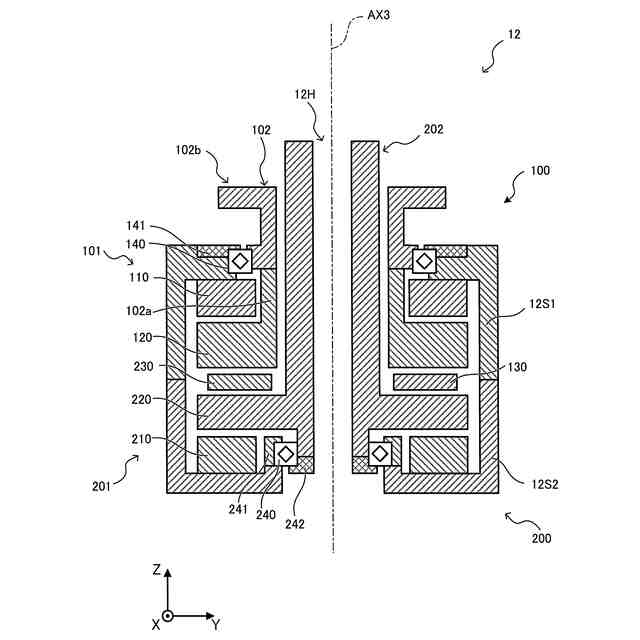
第1モータユニット及び第2モータユニットの内部構成の一例を模式的に表す断面図である。
ロータの全体構成の一例を表す斜視図である
ロータの全体構成の一例を表す、軸方向におけるステータ側から見た平面図である。
ロータが備える磁石の形状の一例を表す平面図である。
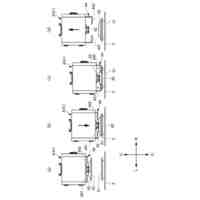
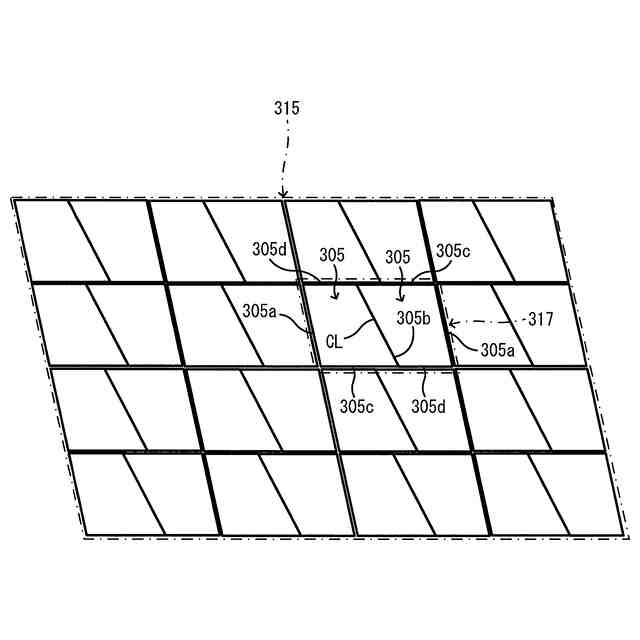
ロータが備える複数の磁石を磁石シートから切り出す態様の一例を表す平面図である。
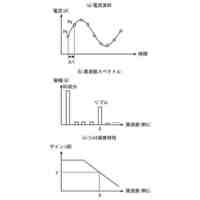
コギングトルクと磁石のシフト角の係数との関係の一例を表すグラフである。
ステータの全体構成の一例を表す、コイル側から見た斜視図である。
ステータの全体構成の一例を表す、結線基板側から見た斜視図である。
ステータの全体構成の一例を表す断面図である。
ステータが備えるボビンの構成の一例を表す斜視図である。
実施形態に係るロータの磁石の配置の一例を表す平面図である。
磁石をスキュー形状としない変形例に係るロータの磁石の配置の一例を表す平面図である。
磁石の径方向外側及び内側の辺を円弧状とした変形例に係るロータの磁石の配置の一例を表す平面図である。
磁石の径方向外側及び内側の辺を円弧状とし、且つ、磁石をスキュー形状としない変形例に係るロータの磁石の配置の一例を表す平面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
摩耗情報算出システム
1か月前
株式会社安川電機
ロボットシステム及び制御方法
3日前
株式会社安川電機
ロボットシステム及び制御方法
1か月前
株式会社安川電機
モータ制御装置、モータ制御方法、及びプログラム
1か月前
キユーピー株式会社
蓋閉め装置および蓋閉め方法
1か月前
株式会社安川電機
ロボットシステム、及びロボットシステムの製造方法
2か月前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
2か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
1か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
1か月前
株式会社安川電機
ロボットシステム、ロボット制御方法、およびロボット制御プログラム
3日前
個人
充電制御システム
3日前
ニデック株式会社
モータ
17日前
個人
発電装置
11日前
個人
電流制御形AC-DC電源
10日前
株式会社ナユタ
電源装置
3日前
個人
ステッピングモータ実習装置
24日前
キヤノン株式会社
電源装置
11日前
スズキ株式会社
移動システム
3日前
カヤバ株式会社
モータ制御装置
6日前
サンデン株式会社
電力変換装置
18日前
トヨタ自動車株式会社
駆動装置
13日前
トヨタ自動車株式会社
充電方法
1か月前
サンデン株式会社
電力変換装置
18日前
カヤバ株式会社
モータ制御装置
6日前
ダイハツ工業株式会社
グロメット
2日前
株式会社ダイヘン
給電装置
4日前
個人
回転力発生装置
9日前
日産自動車株式会社
回転電機
13日前
新電元工業株式会社
充電装置
1か月前
ミツミ電機株式会社
電源回路
12日前
ダイハツ工業株式会社
充電システム
12日前
トヨタ自動車株式会社
電池システム
16日前
シャープ株式会社
冷蔵庫
18日前
住友金属鉱山株式会社
遮熱装置
1か月前
富士電機株式会社
電力変換装置
6日前
株式会社デンソー
携帯機
2日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ