TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085362
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199190
出願日
2023-11-24
発明の名称
ロボット
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20250529BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】軽量化と剛性向上との両立に有効なロボットを提供する。
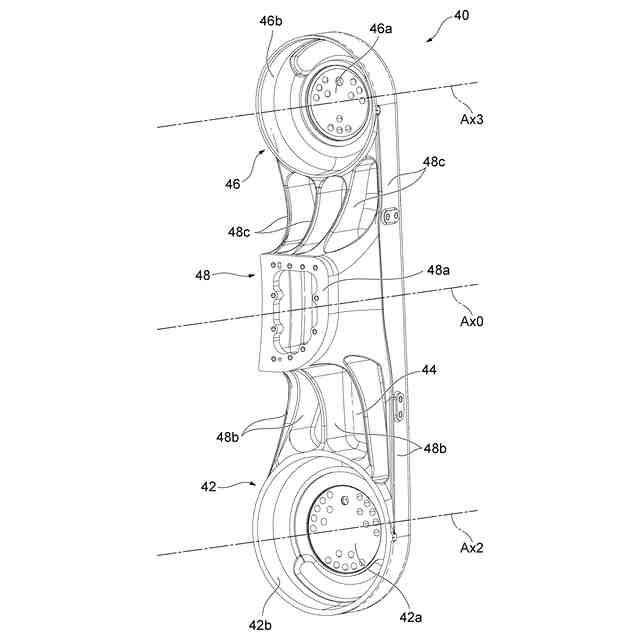
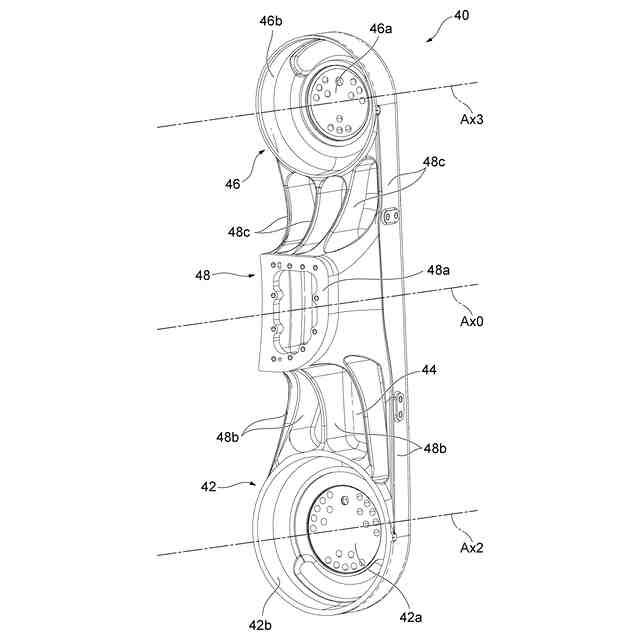
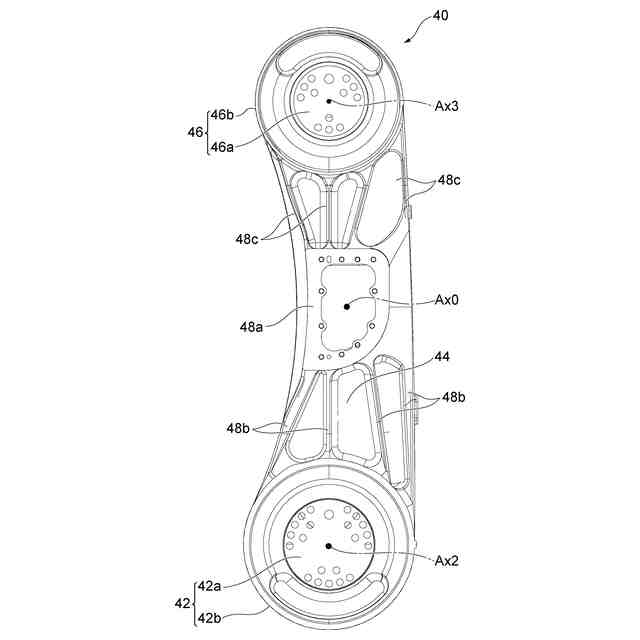
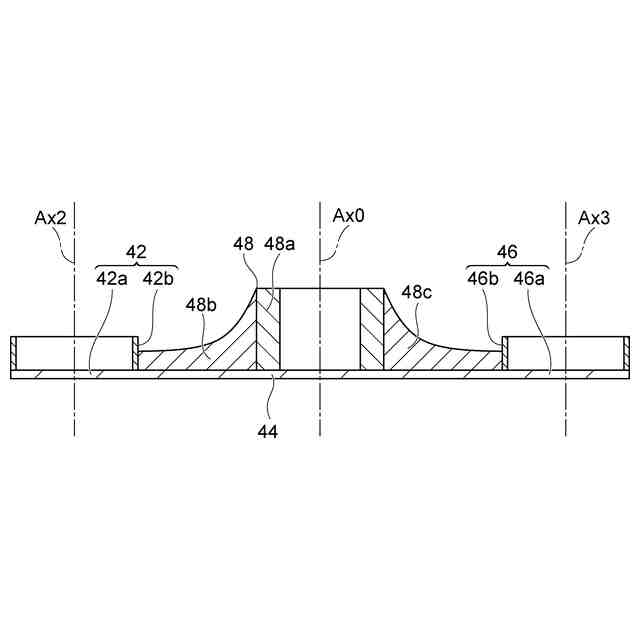
【解決手段】本開示の一側面に係るロボットは、リンクと、前記リンクを回転軸線まわりに回転させるアクチュエータと、を備え、前記リンクは、前記アクチュエータに接続される接続部と、前記回転軸線に交差して前記接続部から伸びるリンク基部と、前記接続部と、前記リンク基部の端部との間において、前記接続部と前記リンク基部の前記端部とのそれぞれと離れた位置で前記リンク基部から突出した突出部と、を有する。
【選択図】図4
特許請求の範囲
【請求項1】
リンクと、
前記リンクを回転軸線まわりに回転させるアクチュエータと、
を備え、
前記リンクは、
前記アクチュエータに接続される接続部と、
前記回転軸線に交差して前記接続部から伸びるリンク基部と、
前記接続部と、前記リンク基部の端部との間において、前記接続部と前記リンク基部の前記端部とのそれぞれと離れた位置で前記リンク基部から突出した突出部と、を有する、
ロボット。
続きを表示(約 1,300 文字)
【請求項2】
前記リンクは、前記リンク基部から突出したリブを更に有し、
前記リブは、少なくとも前記突出部に接続されている、
請求項1に記載のロボット。
【請求項3】
前記リブは、前記突出部と前記接続部とを接続する、
請求項2に記載のロボット。
【請求項4】
少なくとも前記リンク基部が伸びる方向において、前記リンク基部に対する前記リブの突出高さは、前記突出部との距離が小さくなるのに応じて高くなっている、
請求項2又は3に記載のロボット。
【請求項5】
前記リンク基部が伸びる方向に交差する方向においても、前記リンク基部に対する前記リブの突出高さは、前記突出部との距離が小さくなるのに応じて高くなっている、
請求項4に記載のロボット。
【請求項6】
前記接続部は、
前記リンク基部に連なって前記アクチュエータに接続される接続基部と、
前記アクチュエータの少なくとも一部を包囲するように前記接続基部から突出した包囲壁と、
を有し、
前記突出部及び前記リブは、前記包囲壁と同じ方向に突出しており、
前記リブは、前記包囲壁に接続されている、
請求項3に記載のロボット。
【請求項7】
前記リンクは、前記リブを含む複数のリブを有し、
前記複数のリブのそれぞれは、前記突出部と前記包囲壁とを接続しており、
前記複数のリブの間隔は、前記突出部からの距離が大きくなるにつれて大きくなっている、
請求項6に記載のロボット。
【請求項8】
前記突出部は、前記リンク基部に交差する軸線まわりに環状に形成されている、
請求項1~3のいずれか一項に記載のロボット。
【請求項9】
前記リンクの端部に接続される第2リンクと、
前記回転軸線に平行な第2回転軸線まわりに前記第2リンクを回転させる第2アクチュエータと、
を更に備え、
前記リンクは、
前記第2アクチュエータに接続される第2接続部と、
前記突出部と前記第2接続部とを接続する第2リブと、を更に有する、
請求項3に記載のロボット。
【請求項10】
前記接続部は、
前記リンク基部に連なって前記アクチュエータに接続される接続基部と、
前記アクチュエータの少なくとも一部を包囲するように前記接続基部から突出した包囲壁と、
を有し、
前記第2接続部は、
前記リンク基部に連なって前記第2アクチュエータに接続される第2接続基部と、
前記第2アクチュエータの少なくとも一部を包囲するように前記第2接続基部から突出した第2包囲壁と、
を有し、
前記突出部、前記リブ、及び前記第2リブは、前記包囲壁及び前記第2包囲壁と同じ方向に突出しており、
前記リブは、前記包囲壁に接続されており、
前記第2リブは、前記第2包囲壁に接続されている、
請求項9に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、基台と、第1軸まわりに回転可能に基台に連結された第1構造体と、第1軸に対して直交する第2軸まわりに回転可能に第1構造体に連結された第2構造体と、第2軸と平行な第3軸まわりに回転可能に第2構造体に連結された第3構造体と、を備えるロボットが開示されている。第2構造体は、主構造部と、補助構造部と、主構造部を補助構造部に連結する連結部と、を有する。第1構造体及び第3構造体のそれぞれは、主構造部と補助構造部とにより挟み込まれている。
【先行技術文献】
【特許文献】
【0003】
特開2012-161868号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、軽量化と剛性向上との両立に有効なロボットを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るロボットは、リンクと、前記リンクを回転軸線まわりに回転させるアクチュエータと、を備え、前記リンクは、前記アクチュエータに接続される接続部と、前記回転軸線に交差して前記接続部から伸びるリンク基部と、前記接続部と、前記リンク基部の端部との間において、前記接続部と前記リンク基部の前記端部とのそれぞれと離れた位置で前記リンク基部から突出した突出部と、を有する。
【発明の効果】
【0006】
本開示によれば、軽量化と剛性向上との両立に有効なロボットが提供される。
【図面の簡単な説明】
【0007】
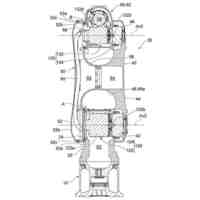
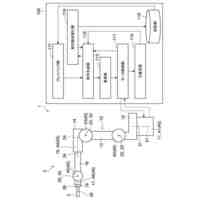
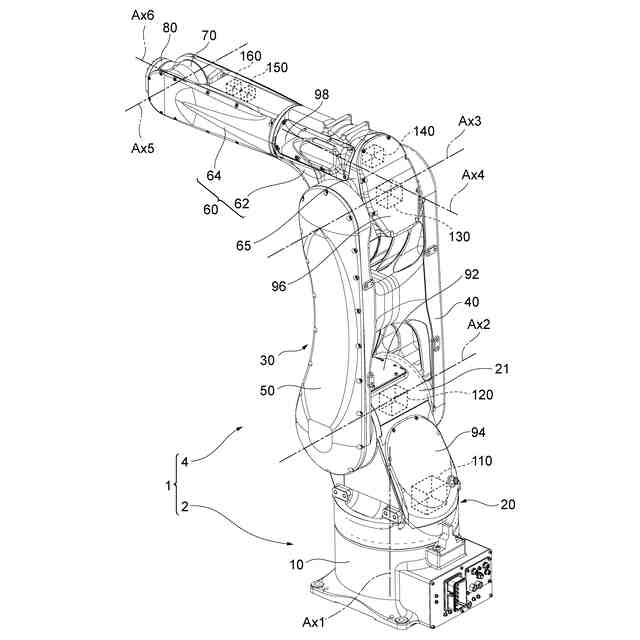
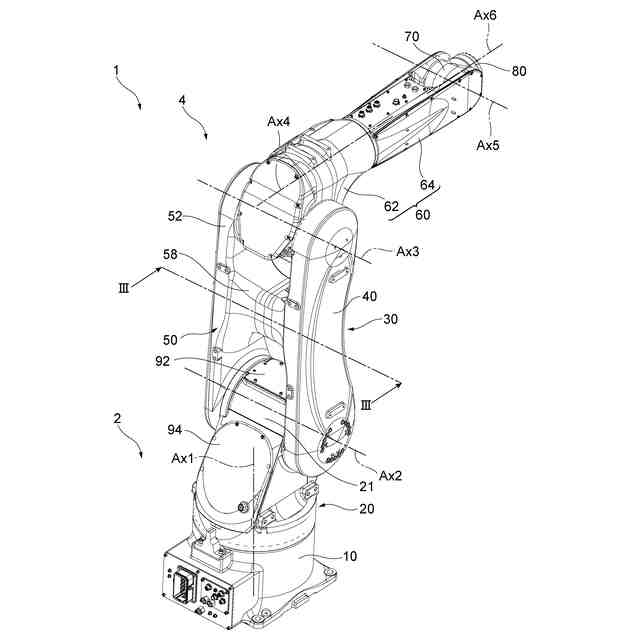
図1は、ロボットの一例を示す斜視図である。
図2は、ロボットの一例を示す斜視図である。
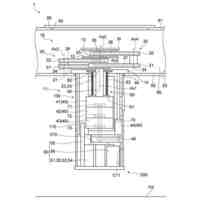
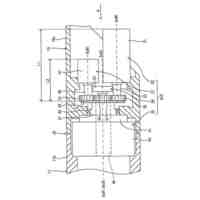
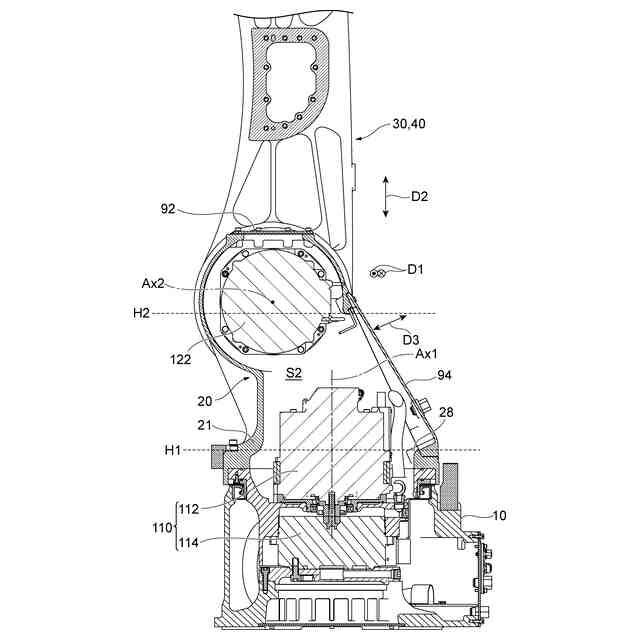
図3は、ロボットの内部の一例を示す断面図である。
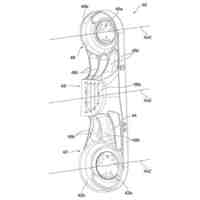
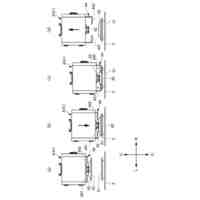
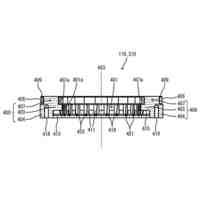
図4は、駆動リンクの一例を示す斜視図である。
図5は、駆動リンクの一例を示す側面図である。
図6は、駆動リンクの一例を模式的に示す側面図である。
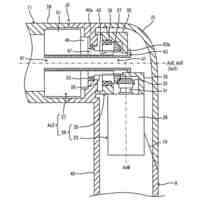
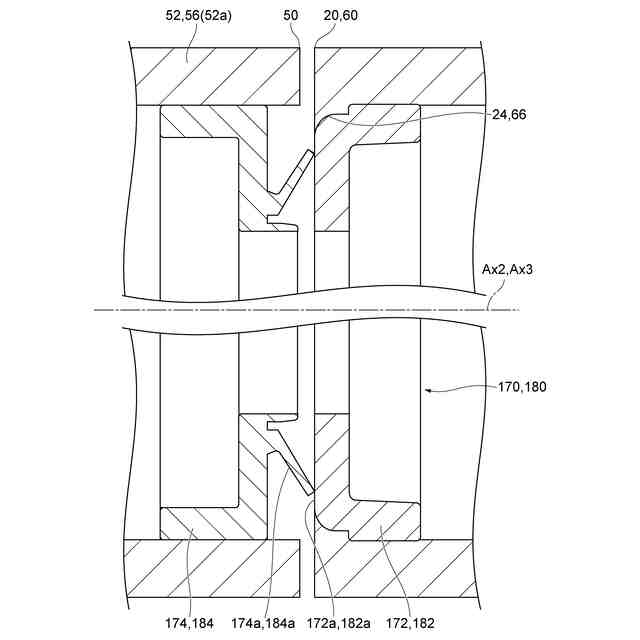
図7は、リンク間に設けられるシールの一例を模式的に示す断面図である。
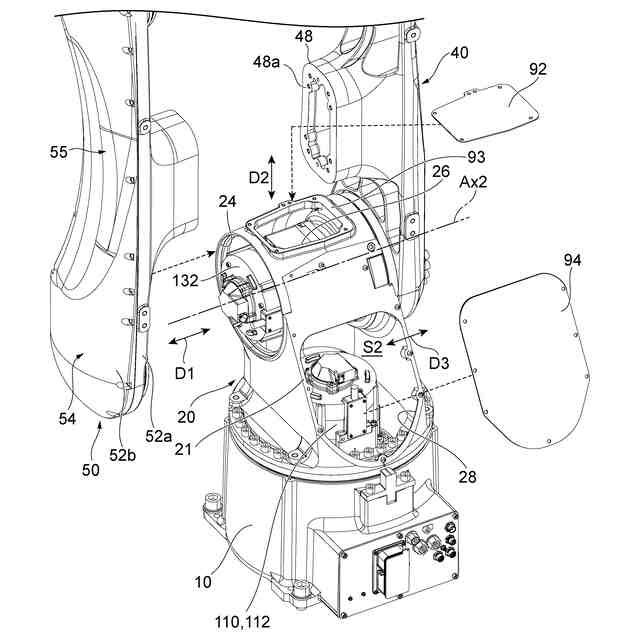
図8は、カバーが取り外れた状態のロボットの一部を例示する斜視図である。
図9は、旋回リンクの内部の一例を示す断面図である。
図10は、カバーが取り外れた状態のロボットの一部を例示する斜視図である。
図11は、リンク間に設けられる軸受けの一例を模式的に示す断面図である。
【発明を実施するための形態】
【0008】
以下、図面を参照して一実施形態について説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。
【0009】
図1及び図2には、一実施形態の係るロボットが示されている。図1に示されるロボット1は、垂直多関節ロボットである。ロボット1は、作業対象物に対して様々な作業を自動で実行する。ロボット1は、例えば産業用ロボットであり、一例では、製品の生産ラインにおいて、部品又は組立品に対して様々な搬送、加工、又は組立等を自動で実行する。なお、ロボット1の用途は産業用に限られない。以下、ロボット1の構造の概要を最初に説明したうえで、ロボット1が備える一部の部材について、その詳細を説明する。
【0010】
[ロボット構造の概要]
ロボット1は、基部2と、多関節アーム4と、を備える。基部2は、多関節アーム4を支持する部分である。多関節アーム4は、回転可能な状態で基部2に取り付けられており、シリアルリンク型の構造を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
摩耗情報算出システム
1か月前
株式会社安川電機
ロボットシステム及び制御方法
1か月前
株式会社安川電機
ロボット、ロボットの製造方法
2か月前
株式会社安川電機
ロボット、ロボットの製造方法
2か月前
株式会社安川電機
モータ制御装置、モータ制御方法、及びプログラム
24日前
キユーピー株式会社
蓋閉め装置および蓋閉め方法
1か月前
株式会社安川電機
ロボットシステム、及びロボットシステムの製造方法
1か月前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
1か月前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
1か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
1か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
1か月前
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
27日前
株式会社ダイヘン
搬送装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
24日前
川崎重工業株式会社
ロボット
25日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
24日前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
24日前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
株式会社マキタ
電気機器
25日前
オークラ輸送機株式会社
ハンド装置
1か月前
ホシデン株式会社
分解用治具
1か月前
株式会社スター精機
産業用ロボット
1か月前
アピュアン株式会社
衝撃工具
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ