TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085430
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199305
出願日
2023-11-24
発明の名称
ロボット
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
主分類
H01L
21/677 20060101AFI20250529BHJP(基本的電気素子)
要約
【課題】省スペース化とメンテナンス性との両立に有効なロボットを提供する。
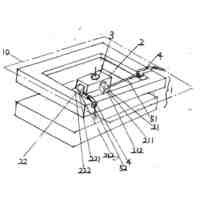
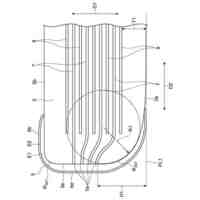
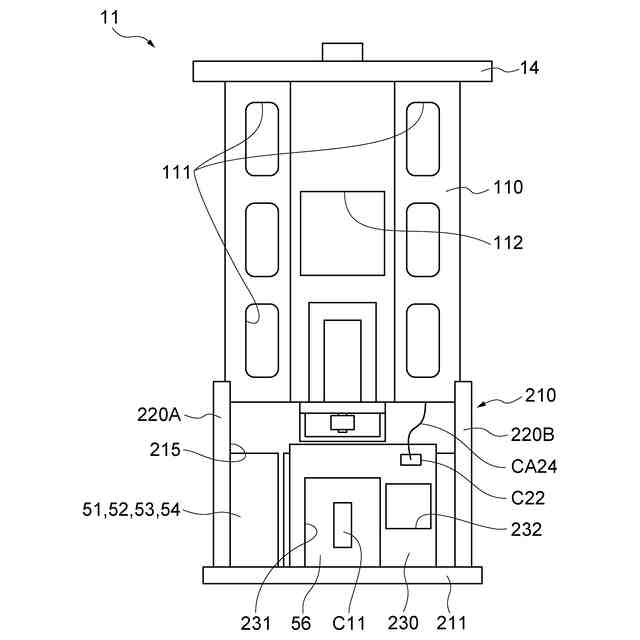
【解決手段】ロボット10は、基板Wを支持するハンド12と、ベース11と、ハンド12をベース11に連結する多関節アーム20と、多関節アーム20を駆動してベース11に対するハンド12の位置を変更する1以上のモータ40と、1以上のモータ40に駆動電力を供給する駆動回路50と、駆動回路50を収容し、取り外し可能な状態でベース11に取り付けられる回路筐体200と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
基板を支持するハンドと、
ベースと、
前記ハンドを前記ベースに連結する多関節アームと、
前記多関節アームを駆動して前記ベースに対する前記ハンドの位置を変更する1以上のモータと、
前記1以上のモータに駆動電力を供給する駆動回路と、
前記駆動回路を収容し、取り外し可能な状態で前記ベースに取り付けられる回路筐体と、
を備えるロボット。
続きを表示(約 990 文字)
【請求項2】
前記アームと前記ベースとの間を仕切るように広がるフランジを更に備え、
前記回路筐体は、前記ベースが前記回路筐体と前記フランジとの間に位置するように前記ベースに取り付けられる、
請求項1記載のロボット。
【請求項3】
前記ベースの内部空間と前記ベースの外部空間とを連通させる第1通風口と、
前記回路筐体の内部空間と前記回路筐体の外部空間とを連通させる第2通風口と、
前記ベースの内部空間と前記回路筐体の内部空間とを経て、前記第1通風口と前記第2通風口との間に気流を発生させるベンチレータと、
を更に備える、
請求項2記載のロボット。
【請求項4】
前記ベンチレータは、前記ベースの内部空間と前記回路筐体の内部空間とを経て、前記第2通風口から前記第1通風口に流れる気流を発生させる、
請求項3記載のロボット。
【請求項5】
前記ベンチレータは、前記ベースの内部空間から前記ベースの外部空間に気体を送るように前記第1通風口に設けられたファンを有する、
請求項4記載のロボット。
【請求項6】
前記ベンチレータは、前記回路筐体の外部空間から前記回路筐体の内部空間に気体を送るように前記第2通風口に設けられた第2ファンを更に有する、
請求項5記載のロボット。
【請求項7】
前記1以上のモータは前記ベースに内蔵されている、
請求項4~6のいずれか一項記載のロボット。
【請求項8】
前記駆動回路の一部が前記回路筐体から前記フランジに向かって突出し、前記ベースに収容される、
請求項4~6のいずれか一項記載のロボット。
【請求項9】
前記ベースの内部空間と、前記ベースの外部空間とを気密分離するように前記フランジに設けられたシール部材を更に備える、
請求項2~6のいずれか一項記載のロボット。
【請求項10】
前記ベース及び前記回路筐体は前記フランジの下に位置し、
前記フランジは、前記回路筐体が床面から離れた状態で、前記ベースを保持する、
請求項2~6のいずれか一項記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、筐体と、筐体に取り付けられた第一アームと、第一アームに取り付けられた第二アームと、第二アームに取り付けられた第三アームと、第三アームに取り付けられた第四アームと、を備える搬送ロボットが開示されている。
筐体には、搬送ロボットを駆動するモータに駆動電源及び制御用の信号を出力する制御装置が内蔵されている。
【先行技術文献】
【特許文献】
【0003】
特開2007-038360号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、省スペース化とメンテナンス性との両立に有効なロボットを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るロボットは、基板を支持するハンドと、ベースと、ハンドをベースに連結する多関節アームと、多関節アームを駆動してベースに対するハンドの位置を変更する1以上のモータと、1以上のモータに駆動電力を供給する駆動回路と、駆動回路を収容し、取り外し可能な状態でベースに取り付けられる回路筐体と、を備える。
【発明の効果】
【0006】
本開示によれば、省スペース化とメンテナンス性との両立に有効なロボットを提供することができる。
【図面の簡単な説明】
【0007】
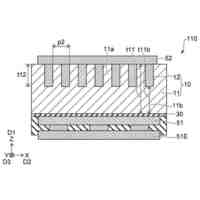
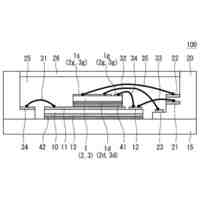
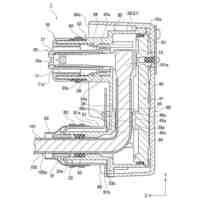
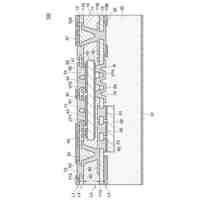
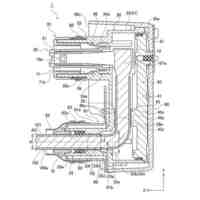
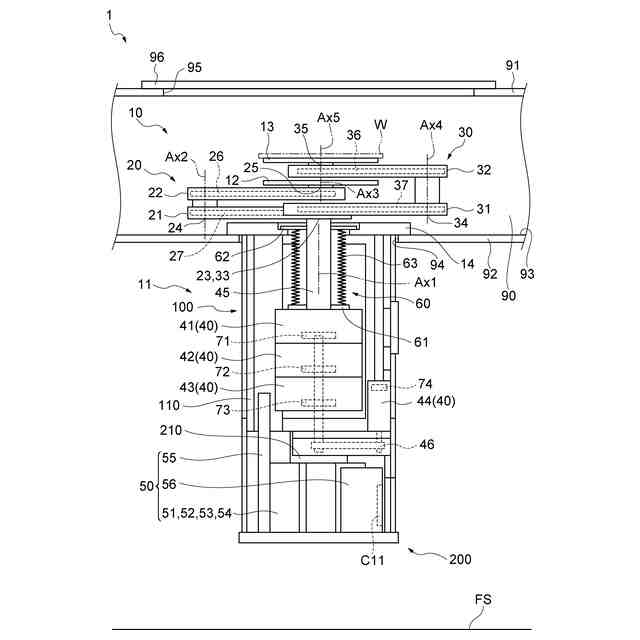
ロボットの構成を例示する断面図である。
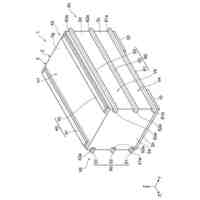
カバーが取り外されたベース及び回路筐体の正面図である。
カバーが取り外されたベース及び回路筐体の背面図である。
カバーが取り付けられたベース及び回路筐体の側面図である。
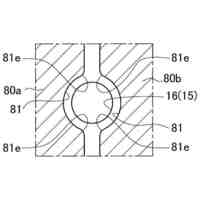
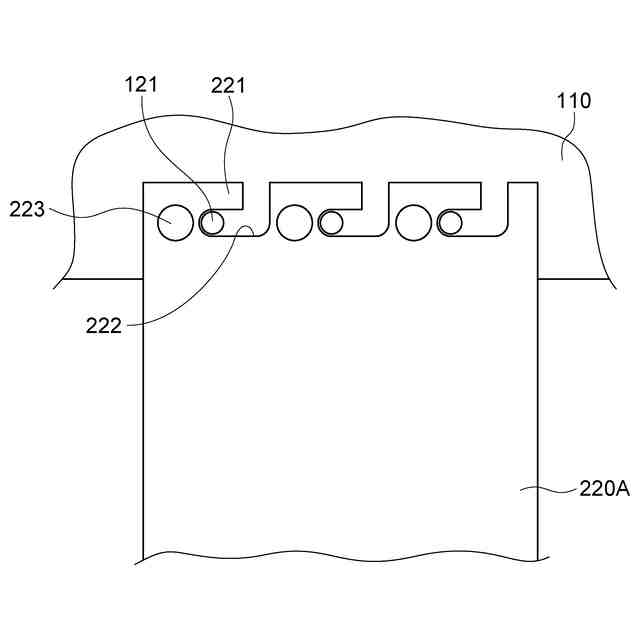
第1フレームに対する第2フレームの取付部を例示する側面図である。
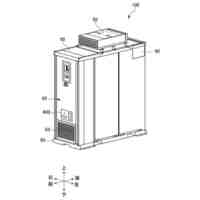
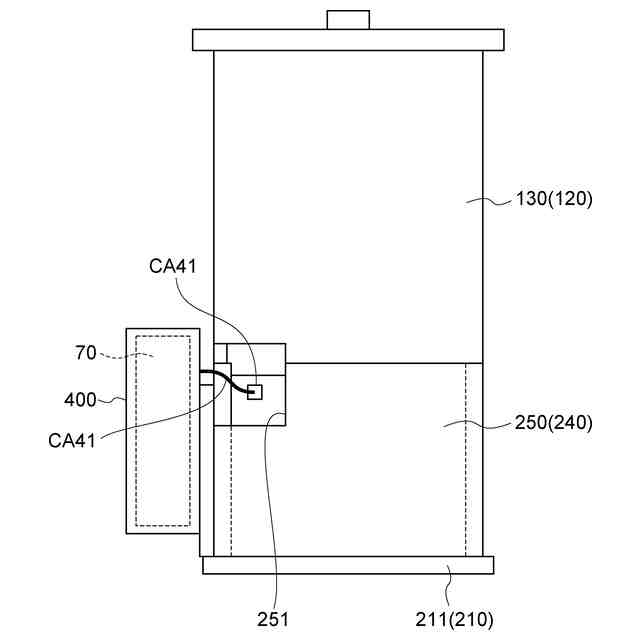
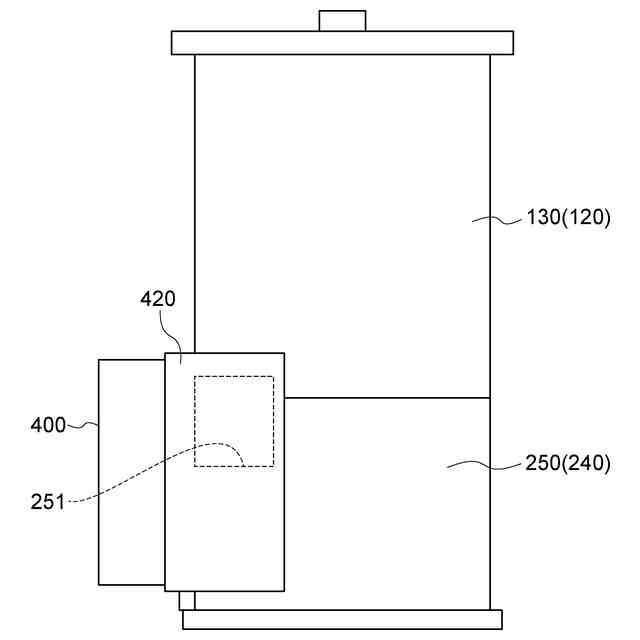
ベース、回路筐体、及び電源筐体の背面図である。
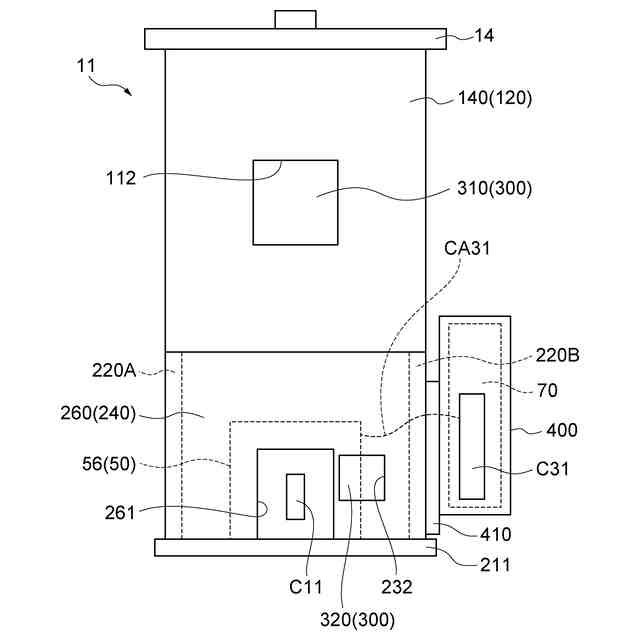
ベース、回路筐体、及び電源筐体の正面図である。
電源筐体にカバーが取り付けられた状態を示す正面図である。
【発明を実施するための形態】
【0008】
以下、実施形態について、図面を参照しつつ詳細に説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。
【0009】
図1に示す基板搬送装置1は、基板Wに対し処理を行う基板処理装置において、基板Wを搬送する装置である。基板Wの例としては、半導体基板、ガラス基板、マスク基板、又はFPD(FlatPanelDisplay)基板等が挙げられる。図1に示すように、基板搬送装置1は、チャンバ90と、ロボット10とを備える。チャンバ90は、搬送中の基板Wを収容する。例えばチャンバ90は、水平に広がった天板91と、天板91の下方で水平に広がった底板92とを有し、天板91と底板92との間に形成される内部空間93に基板Wを収容する。チャンバ90は、密閉型であってもよく、内部空間93を真空にすることが可能な耐圧型であってもよい。
【0010】
ロボット10は、内部空間93において基板Wを搬送する。例えばロボット10は、チャンバ90の周囲に配置された複数のステーション間で基板Wを搬送する。複数のステーションは、搬送対象の基板Wを一時的に収容するロードロックチャンバと、基板Wに対し処理を行う処理チャンバとを含んでいてもよい。例えばロボット10は、内部空間93において、水平方向に沿って基板Wを搬送する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボットシステム及び制御方法
今日
株式会社安川電機
モータ制御装置、モータ制御方法、及びプログラム
28日前
株式会社安川電機
ロボットシステム、ロボット制御方法、およびロボット制御プログラム
今日
個人
超精密位置決め機構
今日
東レ株式会社
積層多孔質膜
3日前
CKD株式会社
巻回装置
2日前
株式会社GSユアサ
蓄電装置
6日前
株式会社GSユアサ
蓄電素子
9日前
株式会社大阪ソーダ
複合固体電解質
9日前
日本特殊陶業株式会社
保持装置
7日前
ダイハツ工業株式会社
固定治具
9日前
日本特殊陶業株式会社
保持装置
2日前
日本化薬株式会社
電流遮断装置
今日
個人
“hi-light surf.”
8日前
株式会社東芝
回路素子
1日前
株式会社村田製作所
アンテナ装置
1日前
TOWA株式会社
製造装置
7日前
三菱電機株式会社
半導体装置
2日前
TDK株式会社
電子部品
2日前
株式会社クボタ
作業機
9日前
三浦工業株式会社
発電ユニット
9日前
三浦工業株式会社
発電ユニット
9日前
日本バイリーン株式会社
負極部材および電池
2日前
三浦工業株式会社
発電ユニット
9日前
株式会社村田製作所
コイル部品
今日
三浦工業株式会社
発電ユニット
9日前
TDK株式会社
電子部品
8日前
日本航空電子工業株式会社
同軸コネクタ
6日前
トヨタ自動車株式会社
電池
2日前
矢崎総業株式会社
コネクタ
8日前
TDK株式会社
半導体モジュール
7日前
株式会社オーク製作所
放電ランプ
8日前
トヨタ紡織株式会社
燃料電池セル
1日前
矢崎総業株式会社
コネクタ
8日前
ローム株式会社
半導体装置
9日前
ミツミ電機株式会社
アンテナ装置
3日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ