TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025059476
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169578
出願日
2023-09-29
発明の名称
後輪操舵装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B62D
6/00 20060101AFI20250403BHJP(鉄道以外の路面車両)
要約
【課題】作動音に基づく違和感を軽減することと、後輪操舵の応答性能を適切に発揮することができる、バランスのよい後輪操舵制御を実現できる後輪操舵装置を提供する。
【解決手段】後輪操舵装置は、車両の速度に応じて後輪操舵アクチュエータの制御速度の設定が可能な後輪操舵機構と、車両の走行操作入力情報を取得する取得部と、走行操作入力情報に基づいて
、制
御速度を補正する補正部と、
補正部により、制御速度を制限する場合または制御速度を制限しない場合との切り替えを行って補正した補正結果に基づき、
後輪操舵アクチュエータを駆動させる駆動制御部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
車両の車速に応じて後輪操舵アクチュエータの制御速度の設定が可能な後輪操舵機構と、
前記車両の走行操作入力情報を取得する取得部と、
前記走行操作入力情報に基づいて、前記車速に応じて設定された前記後輪操舵アクチュエータの前記制御速度を補正する補正部と、
前記補正部の補正結果に基づき、前記制御速度を制限する作動音抑制優先制御または前記制御速度を制限しない性能優先制御との切替を行い、前記後輪操舵アクチュエータを駆動させる駆動制御部と、
を備える後輪操舵装置。
続きを表示(約 590 文字)
【請求項2】
前記取得部は、前記走行操作入力情報として、前記車両の前輪操舵の操舵速度情報を取得し、
前記補正部は、前記操舵速度情報に応じて前記制御速度を補正する、請求項1に記載の後輪操舵装置。
【請求項3】
前記取得部は、前記走行操作入力情報として、前記車両の加減速度情報を取得し、
前記補正部は、前記加減速度情報に応じて前記制御速度を補正する、請求項1に記載の後輪操舵装置。
【請求項4】
前記取得部は、前記走行操作入力情報として、前記車両の前輪操舵の操舵方向情報を取得し、
前記補正部は、前記操舵方向情報がステアリング中立方向への操舵を示す場合は前記制御速度を制限する補正制御を実行し、前記操舵方向情報がステアリング非中立方向への操舵を示す場合は、前記制御速度の補正制御を非実行とする、請求項1に記載の後輪操舵装置。
【請求項5】
前記取得部は、前記走行操作入力情報として、前記車両の前輪操舵の反転操作が所定速度以上で行われたことを示す反転操作情報を取得し、
前記補正部は、前記反転操作情報が取得された場合、後輪操舵による後輪の目標舵角が、前記後輪の実舵角に一致するまで前記制御速度の制限を最大にして現在の後輪舵角を保持し、一致後は前記制御速度の最大制限を解除する、請求項1に記載の後輪操舵装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、後輪操舵装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、前輪操舵装置による前輪の操舵に加え、後輪操舵装置による後輪操舵を可能にする車両が実用化されている。後輪操舵装置は、例えば、モータや遊星ギア等で構成されるアクチュエータにより、前輪の操舵角度に応じて、後輪を操舵可能とするもので、車両の走行状態に応じて、前輪と後輪が同相で操舵されたり、逆相で操舵されたりする。前輪に加え、後輪を操舵することにより、走行姿勢の安定化や旋回性能の向上に寄与することができる。
【先行技術文献】
【特許文献】
【0003】
特許第6945799号公報
特開2019-214311号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
後輪操舵装置は、アクチュエータの制御速度を高めるほど、後輪操舵性能が向上し、高い応答性能を得ることができる。その一方で、制御速度を高めると作動音が大きくなり車両の静粛性の低下の原因になり、搭乗者に違和感を与えてしまう場合がある。つまり、後輪操舵装置において、作動音の軽減を重視して制御速度を遅くする制御を行うと、十分な応答性能を得られない場合が生じる。また、応答性を重視して制御速度を早くする制御を行うと、静粛性が不十分となり搭乗者に違和感を与えてしまう場合が生じる、という問題があった。
【0005】
そこで、本発明の実施形態が解決しようとする課題の一つは、搭乗者に対する作動音に基づく違和感を軽減することと、後輪操舵の応答性能を適切に発揮することができる、バランスのよい後輪操舵制御を実現できる後輪操舵装置を提供することである。
【課題を解決するための手段】
【0006】
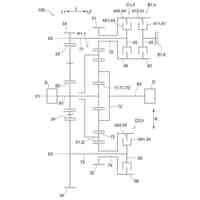
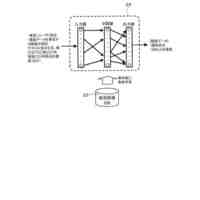
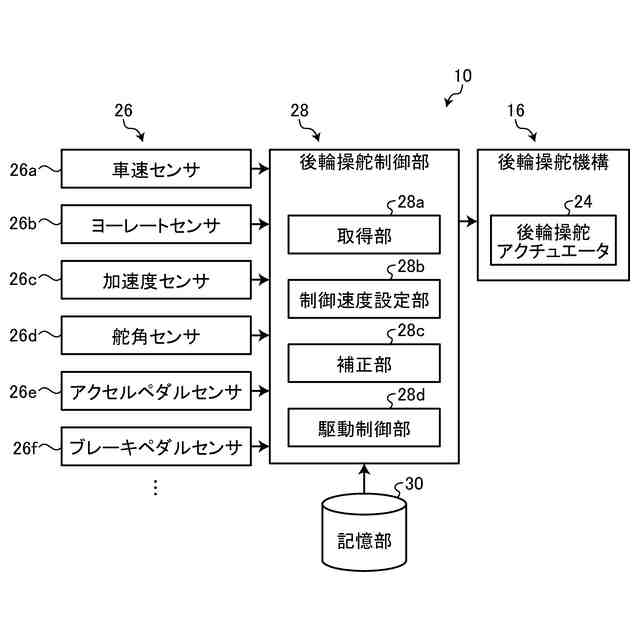
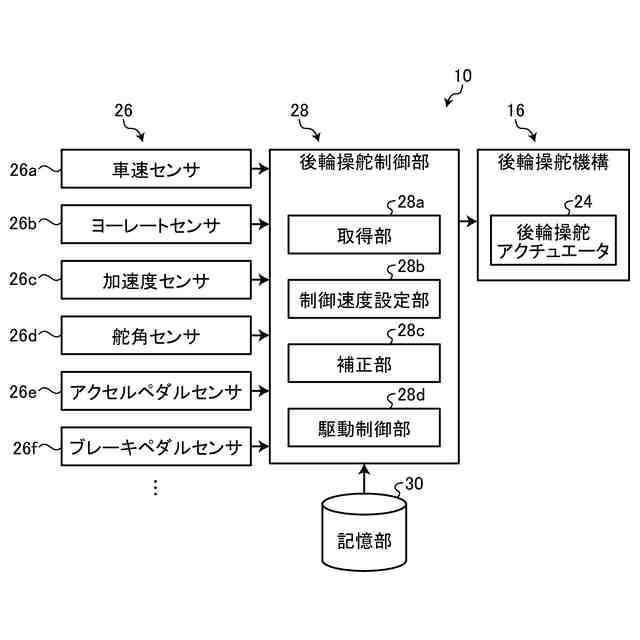
本開示の一例としての後輪操舵装置は、車両の速度に応じて後輪操舵アクチュエータの制御速度の設定が可能な後輪操舵機構と、前記車両の走行操作入力情報を取得する取得部と、前記走行操作入力情報に基づいて、前記車速に応じて設定された前記後輪操舵アクチュエータの前記制御速度を補正する補正部と、前記補正部の補正結果に基づき、前記制御速度を制限する作動音抑制優先制御または前記制御速度を制限しない性能優先制御との切替を行い、前記後輪操舵アクチュエータを駆動させる駆動制御部と、を備える。
【0007】
上記構成によれば、例えば、車両の走行操作(走行操作入力情報)に応じて、後輪操舵アクチュエータの制御速度の補正を行い、制御速度を制限する作動音抑制優先制御と制御速度を制限しない性能優先制御との切り替え(使い分け)を行い、走行操作状態に応じた作動音抑制優先制御と性能優先制御をバランスよく行うことが可能となる。
【図面の簡単な説明】
【0008】
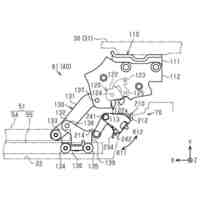
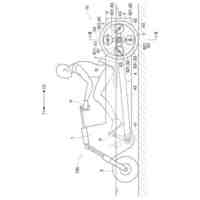
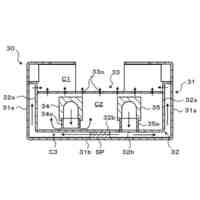
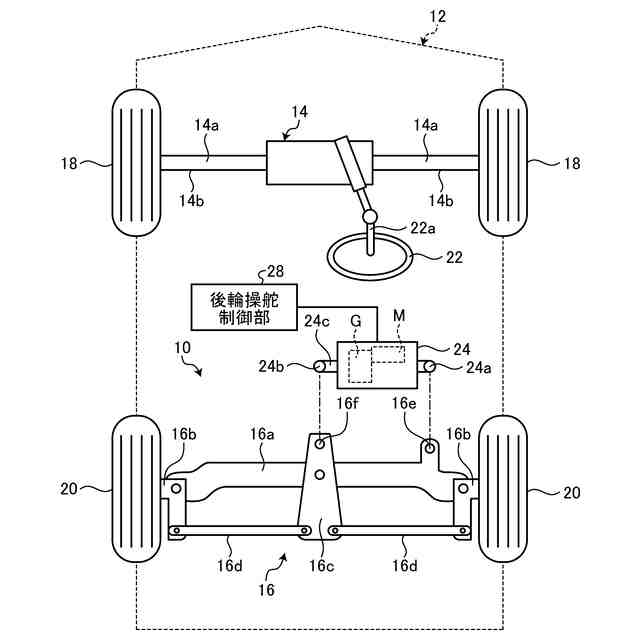
図1は、実施形態に係る後輪操舵装置を備える車両を示す例示的かつ模式的な図である。
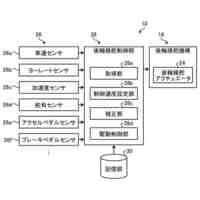
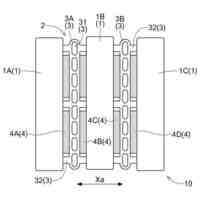
図2は、実施形態に係る後輪操舵装置の構成を示す例示的かつ模式的なブロック図である。
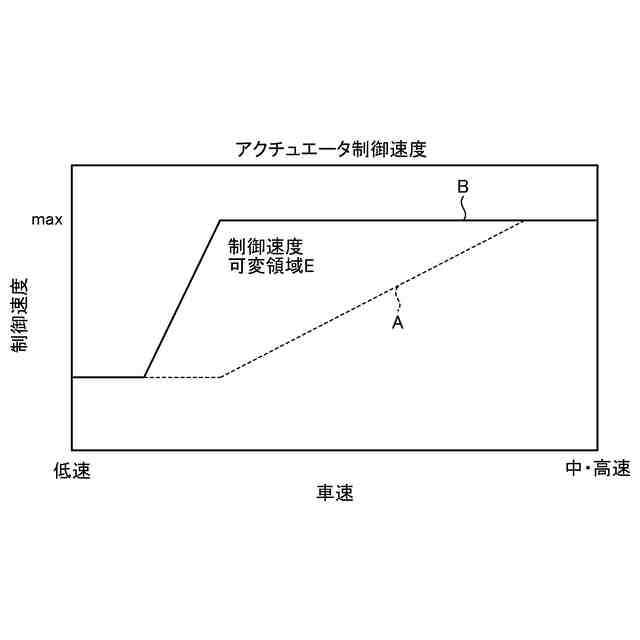
図3は、実施形態に係る後輪操舵装置における作動音抑制重視の場合と性能重視の場合の制御速度と速度の関係を示す例示的かつ模式的な制御マップである。
図4は、実施形態に係る後輪操舵装置において、ドライバ入力に応じた後輪操舵の制御速度の制限調整の手順および制限調整後の目標後輪角の算出を示す例示的かつ模式的な説明図である。
図5は、実施形態に係る後輪操舵装置において、スラローム走行が行われた場合の後輪操舵の保持機能を示す例示的かつ模式的な説明図である。
【発明を実施するための形態】
【0009】
以下、本開示の実施形態および変形例を図面に基づいて説明する。以下に記載する実施形態および変形例の構成、ならびに当該構成によってもたらされる作用および効果は、あくまで一例であって、以下の記載内容に限られるものではない。
【0010】
図1は、実施形態に係る後輪操舵装置10を備える車両12を示す例示的かつ模式的な図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
電池
18日前
株式会社アイシン
変速機
13日前
株式会社アイシン
熱交換器
18日前
株式会社アイシン
流体機械
5日前
株式会社アイシン
流体機械
5日前
株式会社アイシン
流体機械
5日前
株式会社アイシン
車両制御装置
11日前
株式会社アイシン
機械学習装置
20日前
株式会社アイシン
後輪操舵装置
25日前
株式会社アイシン
ドア支持装置
18日前
株式会社アイシン
物体検出装置
21日前
株式会社アイシン
物体検出装置
21日前
株式会社アイシン
物体検出装置
21日前
株式会社アイシン
水陸両用車両
5日前
株式会社アイシン
サンルーフ装置
20日前
株式会社アイシン
サンルーフ装置
20日前
株式会社アイシン
車両用駆動装置
19日前
株式会社アイシン
燃焼器ユニット
5日前
株式会社アイシン
アクチュエータ
20日前
株式会社アイシン
バッテリケース
18日前
株式会社アイシン
車両用駆動装置
13日前
株式会社アイシン
アンテナユニット
4日前
株式会社アイシン
車両制御システム
11日前
株式会社アイシン
スライドドア装置
12日前
株式会社アイシン
水素製造システム
20日前
株式会社アイシン
燃料電池システム
20日前
株式会社アイシン
バッテリ温調装置
18日前
株式会社アイシン
バッテリーの支持構造
19日前
株式会社アイシン
電動車用冷却プレート
18日前
株式会社アイシンナノテクノロジーズ
粉体の定量フィーダ装置
18日前
株式会社アイシン
サスペンション制御装置
12日前
株式会社アイシン
トルクリミッタ付ダンパ
25日前
株式会社アイシン
ロータの製造方法及びロータ
18日前
株式会社アイシン
数値制御装置および数値制御方法
18日前
株式会社アイシン
バッテリ冷却構造、及び温度調節器
5日前
トヨタ自動車株式会社
車両前部構造
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ