TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025073015
公報種別
公開特許公報(A)
公開日
2025-05-12
出願番号
2023183564
出願日
2023-10-25
発明の名称
情報処理装置、情報処理方法及びプログラム
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
G06N
20/00 20190101AFI20250501BHJP(計算;計数)
要約
【課題】ロボット装置の制御に関して、説明性の高い出力を得る技術を提供する。
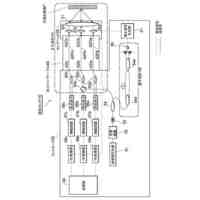
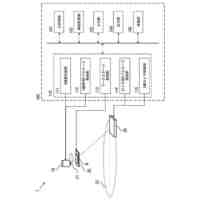
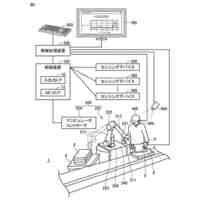
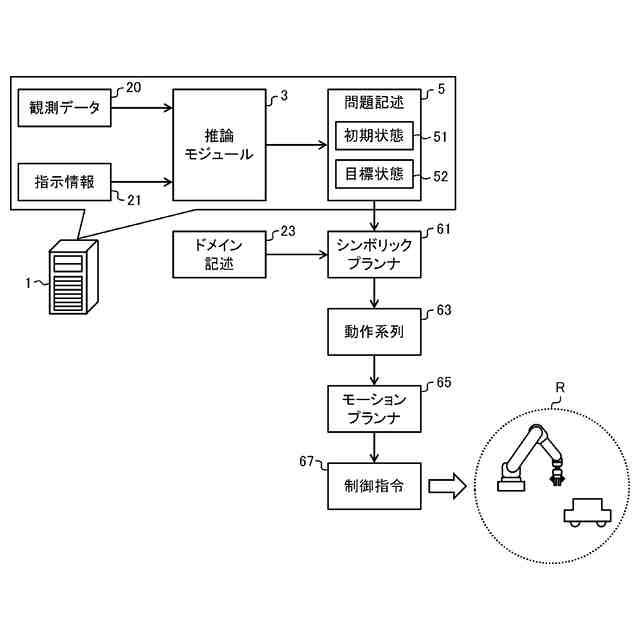
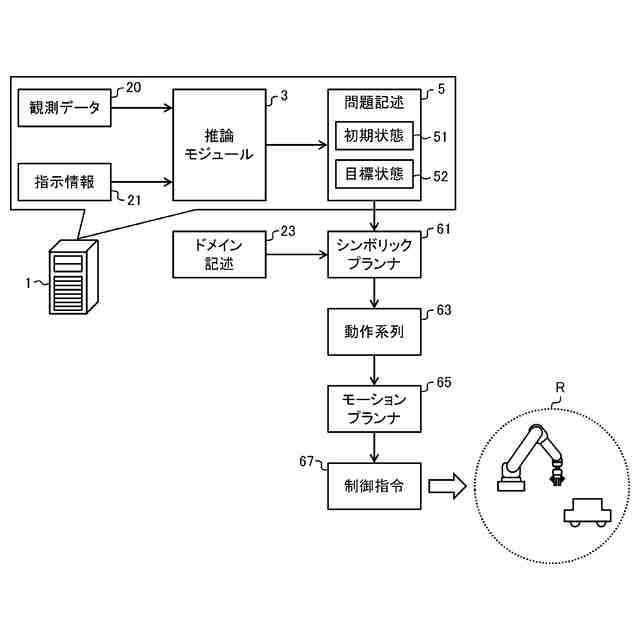
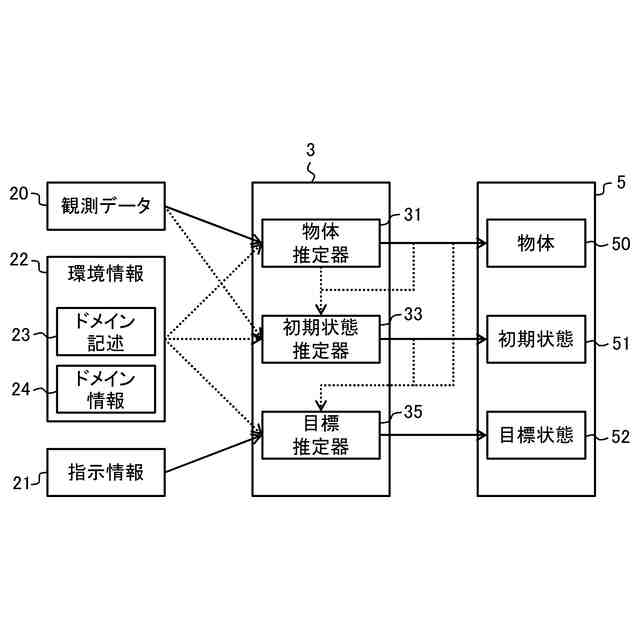
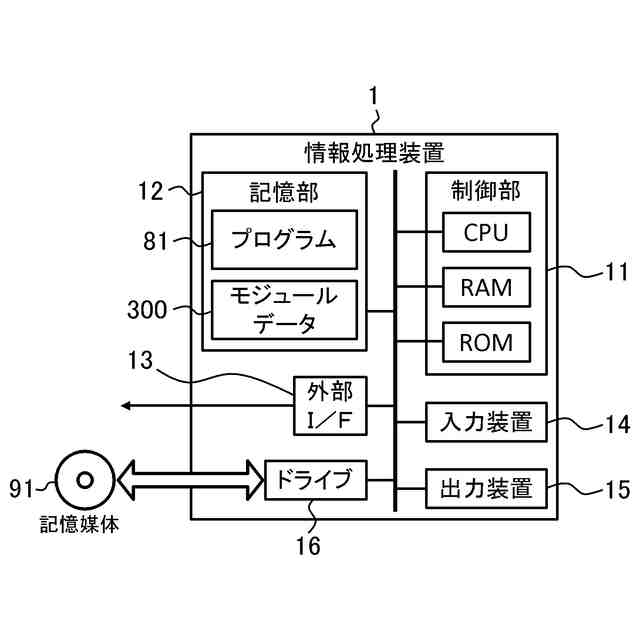
【解決手段】本発明の一側面に係る情報処理装置は、ロボット装置の動作する環境の観測データ、及びロボット装置に与えるタスクの目標に関する指示情報を取得し、推論モジュールを用いて、取得された観測データ及び指示情報からタスクの問題記述を生成し、かつ生成された問題記述を出力する。問題記述は、環境に存在する物体の初期状態及び目標状態の記述を含むように構成される。
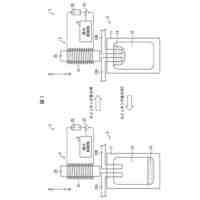
【選択図】図1
特許請求の範囲
【請求項1】
ロボット装置の動作する環境の観測データ、及び前記ロボット装置に与えるタスクの目標に関する指示情報を取得するステップ、
推論モジュールを用いて、取得された前記観測データ及び前記指示情報から前記タスクの問題記述を生成するステップであって、前記問題記述は、前記環境に存在する物体の初期状態及び目標状態の記述を含む、ステップ、並びに
生成された前記問題記述を出力するステップ、
を実行するように構成される制御部を備える、
情報処理装置。
続きを表示(約 1,200 文字)
【請求項2】
生成される前記問題記述は、所定のフォーマットに従う、
請求項1に記載の情報処理装置。
【請求項3】
生成される前記問題記述は、前記環境に存在する前記物体の記述を更に含む、
請求項1に記載の情報処理装置。
【請求項4】
前記観測データは、センサのセンシングデータにより構成され、
前記指示情報は、前記目標を自然言語で指示する言語情報により構成される、
請求項1に記載の情報処理装置。
【請求項5】
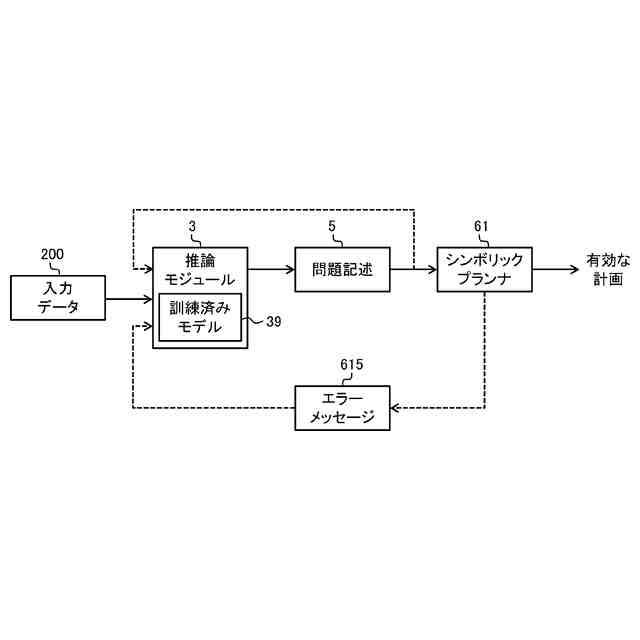
前記推論モジュールは、コンテキスト内学習の訓練済みモデルを含むように構成され、
前記制御部は、生成された前記問題記述をプランナに与えて、前記ロボット装置の行動計画を生成する処理において、当該プランナがエラーメッセージを出力した場合、
出力された前記エラーメッセージを取得するステップ、並びに
前記推論モジュールを用いて、前記問題記述及び前記エラーメッセージから新たな問題記述を生成するステップ、
を更に実行するように構成される、
請求項1に記載の情報処理装置。
【請求項6】
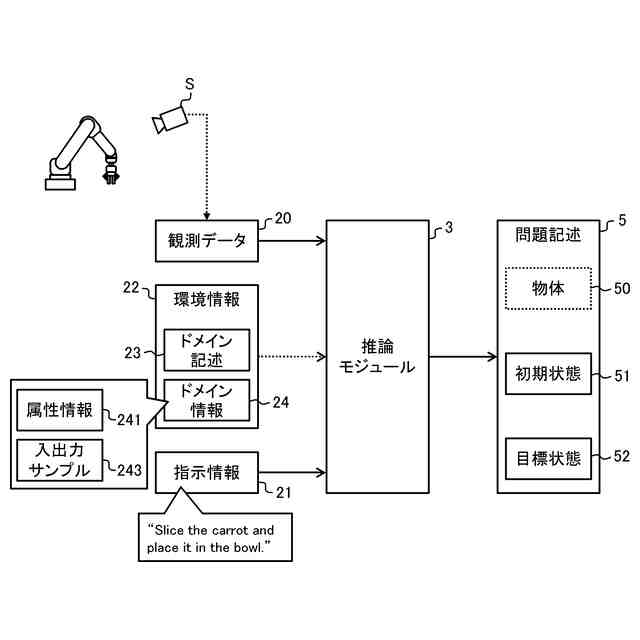
前記取得するステップでは、前記制御部は、前記環境に関する環境情報を更に取得するように構成され、
取得された前記観測データ及び前記指示情報から前記問題記述を生成することは、取得された前記観測データ、前記指示情報及び前記環境情報から前記問題記述を生成することにより構成される、
請求項1に記載の情報処理装置。
【請求項7】
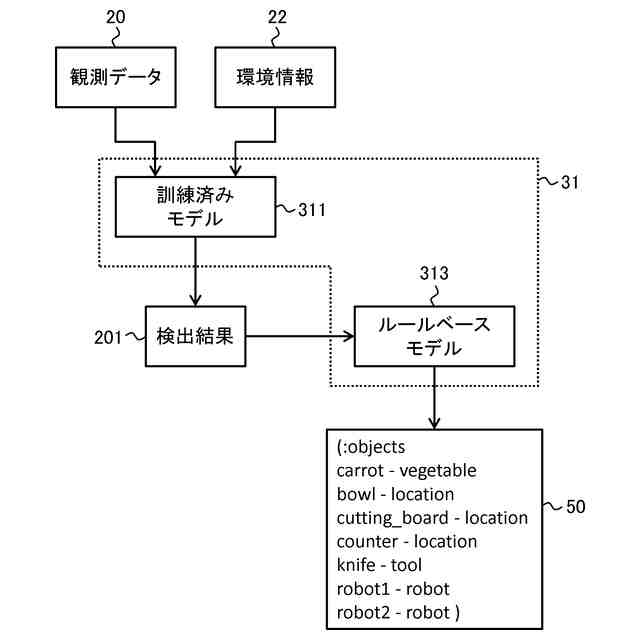
生成される前記問題記述は、前記環境に存在する前記物体の記述を更に含み、
前記推論モジュールは、物体推定器を含み、
前記推論モジュールを用いて、前記問題記述を生成することは、前記物体推定器を用いて、前記環境に存在する前記物体の記述を取得された前記観測データから生成することを含む、
請求項1に記載の情報処理装置。
【請求項8】
前記物体推定器は、コンテキスト内学習の訓練済みモデルを備える、
請求項7に記載の情報処理装置。
【請求項9】
前記取得するステップでは、前記制御部は、前記環境に存在する前記物体の属性情報を更に取得するように構成され、
取得された前記観測データから前記物体の記述を生成することは、取得された前記観測
データ及び前記属性情報から前記物体の記述を生成することにより構成される、
請求項7又は8に記載の情報処理装置。
【請求項10】
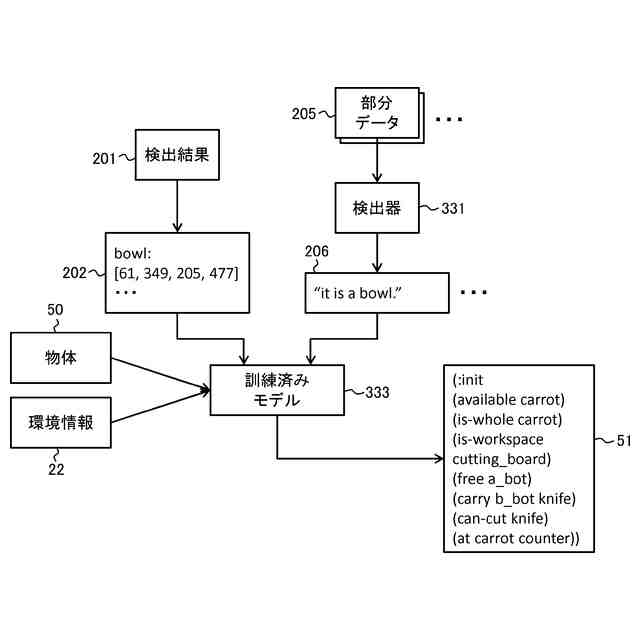
前記推論モジュールは、初期状態推定器を含み、
前記推論モジュールを用いて、前記問題記述を生成することは、前記初期状態推定器を用いて、前記環境に存在する前記物体の前記初期状態の記述を生成することを含む、
請求項1に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
自然言語によるロボット装置との対話は、非専門家がロボット装置に複雑で多様なタスクを解かせる手段として有望である。近年では、大規模言語モデル(LLM:Large Language Model)を用いて、言語指示から作業空間中でのロボット装置の動作系列を出力する研究が注目を集めている。
【0003】
例えば、非特許文献1には、言語指示からロボット装置の動作系列を生成するシステムが提案されている。非特許文献1で提案されるシステムは、自然言語による指示(言語指示)の入力を受け付ける。当該システムは、LLM(Sayモジュール)を用いて、次に実行する妥当性の高いロボット装置の動作を言語指示から推測する。また、当該システムは、価値関数(Canモジュール)を用いて、実行可能性の高い動作を観測データから推測する。そして、当該システムは、2つの推測結果を統合し、統合の結果に応じて、ロボット装置に与える動作系列(実行する妥当性が高く、実行可能な動作系列)を決定する。
【先行技術文献】
【非特許文献】
【0004】
Michael Ahn et al., “Do As I Can, Not As I Say: Grounding Language in Robotic Affordances”, [online], [令和5年10月24日検索], インターネット<URL:https://arxiv.org/abs/2204.01691>
【発明の概要】
【発明が解決しようとする課題】
【0005】
本件発明者らは、上記従来のシステムには、次のような問題点があることを見出した。すなわち、従来のシステムでは、生成される動作系列は、試行環境に特化しており、人間にとって解釈可能なものであるとは限らない。動作系列をそのまま出力してしまうため、ロボット装置の制御に関して、得られる出力の説明性が低いという問題点があった。
【0006】
本発明は、一側面では、このような事情を鑑みてなされたものであり、その目的は、ロボット装置の制御に関して、説明性の高い出力を得る技術を提供することである。
【課題を解決するための手段】
【0007】
本発明は、上述した課題を解決するために、以下の構成を採用する。なお、以下の発明の構成は適宜組み合わせ可能である。
【0008】
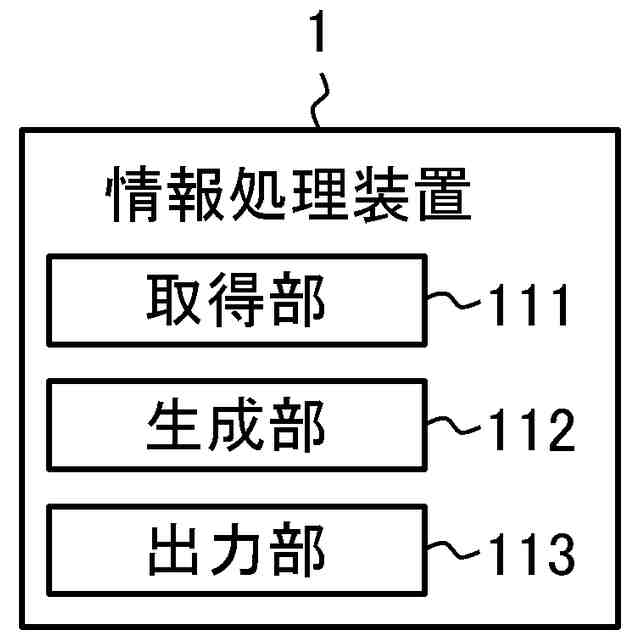
すなわち、本発明の一側面に係る情報処理装置は、ロボット装置の動作する環境の観測データ、及び前記ロボット装置に与えるタスクの目標に関する指示情報を取得するステップ、推論モジュールを用いて、取得された前記観測データ及び前記指示情報から前記タスクの問題記述を生成するステップ、並びに生成された前記問題記述を出力するステップを実行するように構成される制御部を備える。前記問題記述は、前記環境に存在する物体の初期状態及び目標状態の記述を含む。
【0009】
問題記述は、ドメイン記述と共に、プランナが行動計画を生成する(すなわち、動作系列を得る)のに用いられる。この問題記述は、タスクを達成するために、環境に存在する物体の初期状態及び目標状態を記述しており、高い説明性を有する(人間にとって解釈可
能である)。したがって、当該構成によれば、ロボット装置に与える動作系列(指令)を得るための説明性の高い出力を得ることができる。
【0010】
上記一側面に係る情報処理装置において、生成される前記問題記述は、所定のフォーマットに従うものであってよい。当該構成によれば、生成される問題記述が所定のフォーマットに従っていることで、プランナが問題記述から行動計画を生成しやすくすることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
充電装置
5日前
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
光電センサ
1か月前
オムロン株式会社
電力開閉器
1日前
オムロン株式会社
電磁継電器
23日前
オムロン株式会社
電磁継電器
23日前
オムロン株式会社
スレーブ装置
26日前
オムロン株式会社
トリガスイッチ
22日前
オムロン株式会社
トリガスイッチ
1か月前
オムロン株式会社
スイッチング素子
1か月前
オムロン株式会社
モバイルロボット
1か月前
オムロン株式会社
モバイルロボット
1か月前
オムロン株式会社
光干渉測距センサ
1か月前
オムロン株式会社
回転装置及びマウス
26日前
オムロン株式会社
電力開閉器及び電気機器
1日前
オムロン株式会社
電力変換装置とその制御方法
1か月前
オムロン株式会社
情報取得装置、及び自動改札機
26日前
オムロン株式会社
情報処理システム、情報処理方法
1か月前
オムロン株式会社
制御装置、方法、及びプログラム
1か月前
オムロン株式会社
信号処理装置、及び信号処理方法
1か月前
オムロン株式会社
モデル生成方法及び推論プログラム
1か月前
オムロン株式会社
X線撮影システム及びX線検査装置
12日前
オムロン株式会社
コントローラ、方法およびプログラム
1日前
オムロン株式会社
解析装置、解析方法およびプログラム
9日前
オムロン株式会社
表示装置およびこれを備えた展示装置
1か月前
オムロン株式会社
表示装置およびこれを備えた展示装置
1か月前
オムロン株式会社
多関節ロボット、及びモバイルロボット
1か月前
オムロン株式会社
学習装置、操作情報変換装置及び学習方法
26日前
オムロン株式会社
評価装置、評価方法および評価プログラム
8日前
オムロン株式会社
協調作業システム、方法およびプログラム
26日前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
12日前
オムロン株式会社
スイッチユニットおよびこれを備えた展示装置
1か月前
オムロン株式会社
スイッチユニットおよびこれを備えた展示装置
1か月前
オムロン株式会社
信号制御システム、およびステップアップ方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ