TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025074368
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2025035764,2023523935
出願日
2025-03-06,2021-05-28
発明の名称
教示装置、マーカ計測方法及びプログラム
出願人
ファナック株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250502BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】1つのマーカで計測を行う場合と、複数のマーカで計測を行う場合とで、計測方法や教示手順が異なっても、マーカを増やして精度を向上させる手間がかからないようにする。
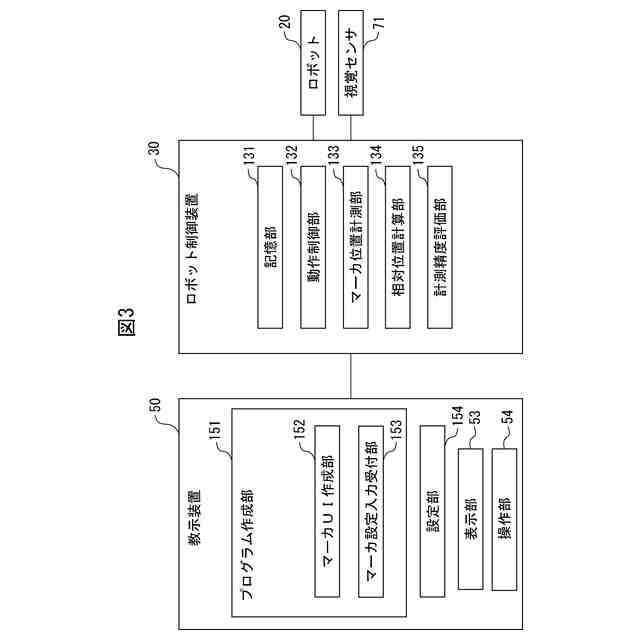
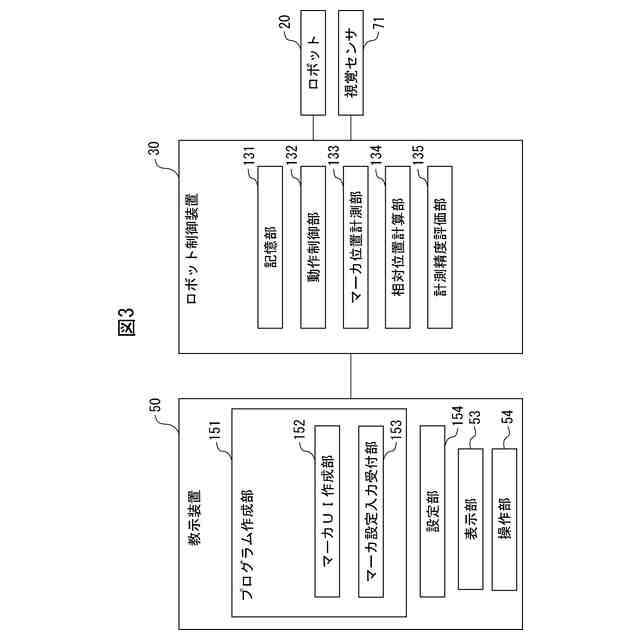
【解決手段】作業空間に設置されたマーカを視覚センサにより計測するプログラムを作成するために用いられる教示装置(50)であって、マーカの計測に関する設定情報を入力するためのユーザインタフェースを作成するユーザインタフェース作成部(152)を備え、ユーザインタフェース作成部(152)は、ユーザインタフェースにおいて、第1の前記マーカに関して入力された第1の前記設定情報を、第2の前記マーカに関する設定において利用可能とする、教示装置(50)である。
【選択図】図3
特許請求の範囲
【請求項1】
作業空間に設置されたマーカを視覚センサにより計測するプログラムを作成するために用いられる教示装置であって、
前記マーカの計測に関する設定情報を入力するためのユーザインタフェースを作成するユーザインタフェース作成部を備え、
前記ユーザインタフェース作成部は、前記ユーザインタフェースにおいて、第1の前記マーカに関して入力された第1の前記設定情報を、第2の前記マーカに関する設定において利用可能とする、教示装置。
続きを表示(約 1,300 文字)
【請求項2】
前記ユーザインタフェースは、第1の前記マーカに関する設定のための第1のユーザインタフェース画面と、第2の前記マーカに関する設定のための第2のユーザインタフェース画面とを含み、
前記第2のユーザインタフェース画面において、第1の前記設定情報が少なくとも部分的にデフォルト値として設定されている、請求項1に記載の教示装置。
【請求項3】
前記第1のユーザインタフェース画面と前記第2のユーザインタフェース画面とは共通の設定項目を含む、請求項2に記載の教示装置。
【請求項4】
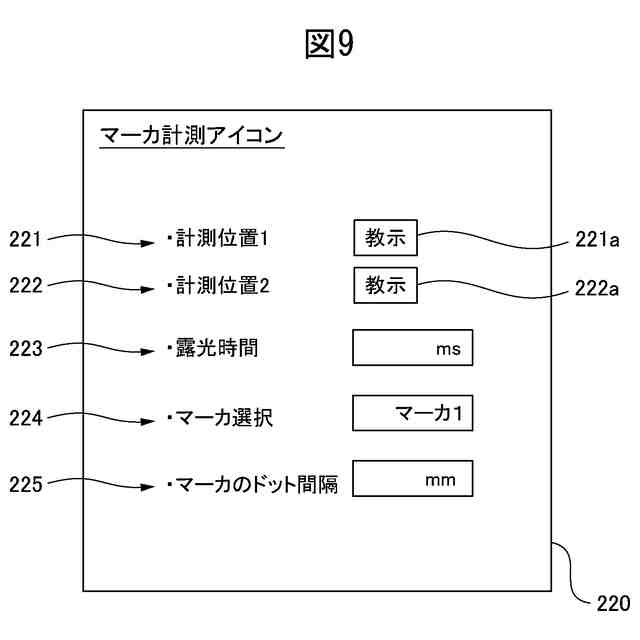
前記設定情報は、前記共通の設定項目として、前記視覚センサの露光時間、前記マーカの選択、前記マーカのドット間隔の一つ以上を含む、請求項3に記載の教示装置。
【請求項5】
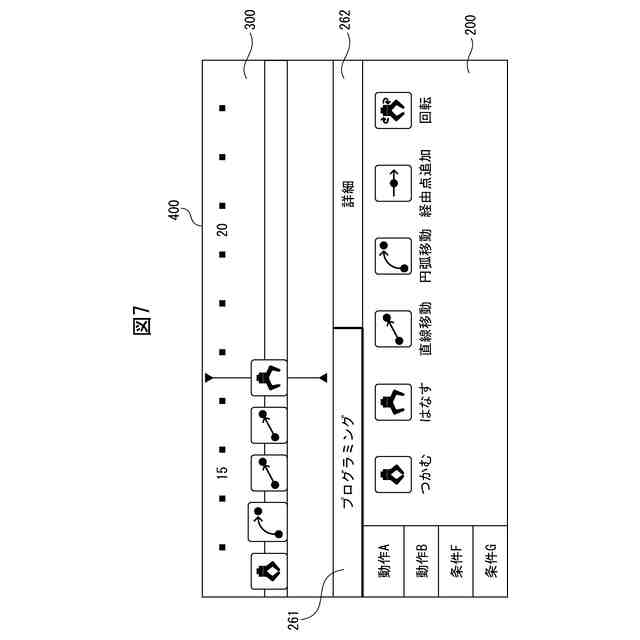
前記プログラムを作成するためのプログラム作成画面を生成するプログラム作成部を更に備え、
前記プログラム作成画面には第1の前記マーカを計測するための第1の計測命令と、第2の前記マーカを計測するための第2の計測命令とが同一の命令として配置されている、請求項1から4のいずれか一項に記載の教示装置。
【請求項6】
前記第1の計測命令と前記第2の計測命令は同一のアイコンで表されている、請求項5に記載の教示装置。
【請求項7】
作業空間に設置されたマーカを視覚センサにより計測するための方法であって、
第1の前記マーカについて計測を行い、
第1の前記マーカの計測結果の精度を評価し、
第1の前記マーカの計測結果の精度が所定のレベル未満である場合に、追加の1以上の前記マーカについて計測を行うこと、を含み、
第1の前記マーカの計測に関して入力された設定情報を、追加の1以上の前記マーカの各々の計測に関する設定情報の設定として利用可能とされた、ユーザインタフェースが提供される、マーカ計測方法。
【請求項8】
第1の前記マーカ及び追加の1以上の前記マーカについての計測結果を合成して、前記作業空間と前記視覚センサとの相対位置関係を求めることを更に含む、請求項7に記載のマーカ計測方法。
【請求項9】
第1の前記マーカの計測に関する前記設定情報、及び、追加の1以上の前記マーカの各々の計測に関する前記設定情報は、共通の設定項目として、前記視覚センサの露光時間、前記マーカの選択、前記マーカのドット間隔の一つ以上を含む、請求項7又は8に記載のマーカ計測方法。
【請求項10】
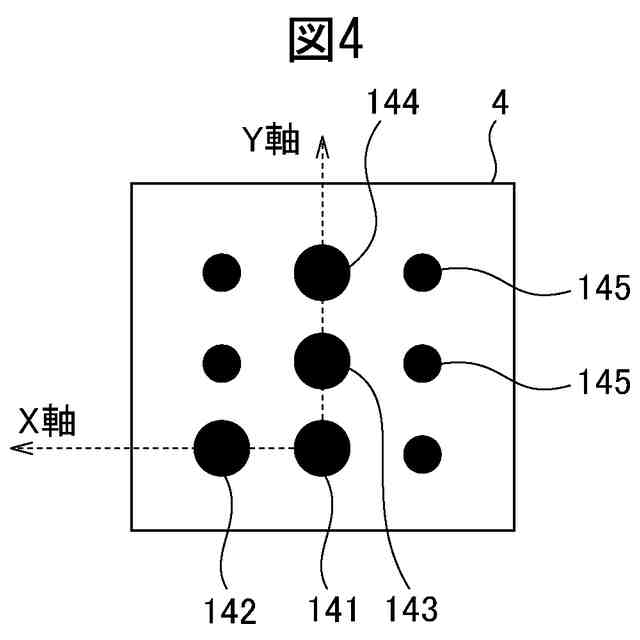
前記マーカは、既知のドット間隔を有し且つ当該マーカの座標系を規定するドットを含むドットパターンを有し、
第1の前記マーカの計測結果の精度を評価することは、
前記マーカ中の各ドットの計測された位置を表す同次座標をPxi、前記マーカの原点に対する各ドットの設計位置を表す同次座標をPyi、計測された前記マーカの位置及び姿勢を表す同次変換行列をPmとするとき、
Σ(Pxi-Pm×Pyi)^2
を指標値として用いて精度を評価することを含む、
請求項7から9のいずれか一項に記載のマーカ計測方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、教示装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
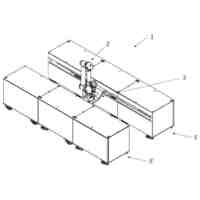
台車やAGV(Automated Guided Vehicle:無人搬送車)にロボットを乗せて移動させ、工作機械などの作業スペースの前に停止させて作業を行う自動化システムが提案されている。
【0003】
このような自動化システムにおいて、ロボットが工作機械に対して加工対象物のロード/アンロードといった様々な作業を行う場合、ロボットを搭載した台車やAGVの停止位置が移動のたびに変わってしまう。そのため、ロボットは毎回同じ動作をするだけでは不十分であり、工作機械に対する台車やAGVの停止位置のずれを計測し、作業スペースに対して正しく作業を行うことができるように、ロボットの動作に補正をかけることが必要になる。その際には、ロボットの手先にカメラを取り付け、作業空間に取り付けたマーカを計測することで、ロボットと工作機械などの作業空間の位置関係を計測し、位置ずれ分を補正してロボットを動作させている。
【0004】
ロボットと作業空間の相対位置を求める手法の一つとして、特許文献1は、「ロボット末端の基準位置検出器(カメラ4)により作業座標に設けられた基準(6)を計測し、ロボット座標による基準の計測位置と予め計測された作業座標における基準の位置の差から設置誤差を推定し、これを補正することによりロボットを制御する」構成を記載する(要約書)。
【0005】
また、特許文献2は、「ロボット外科手術システム100として、ロボットアーム104、エンドエフェクタ112、患者210、および/又は外科用器具608の三次元の動きを追跡するように構成される一つ又は複数のマーカ118を含むことのできる」構成を記載する(段落0050)。
【先行技術文献】
【特許文献】
【0006】
特開平4-211807号公報
特開2020-72773号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
作業空間に設置したマーカをロボットの手先に取り付けたカメラで計測する場合、サイクルタイムや教示工数の観点からは、1つのマーカを検出することでロボットの位置を補正できることが望ましい。しかしながら、1つのマーカの計測による位置補正では必要な精度が得られない場合がある。このような場合、複数のマーカを計測することで位置補正の精度を向上することができる。しかしながら、1つのマーカで計測を行う場合と、複数のマーカで計測を行う場合とで、計測方法や教示手順が異なると、マーカを増やして精度を向上させるのに手間がかかることとなる。
【課題を解決するための手段】
【0008】
本開示の一態様は、作業空間に設置されたマーカを視覚センサにより計測するプログラムを作成するために用いられる教示装置であって、前記マーカの計測に関する設定情報を入力するためのユーザインタフェースを作成するユーザインタフェース作成部を備え、前記ユーザインタフェース作成部は、前記ユーザインタフェースにおいて、第1の前記マーカに関して入力された第1の前記設定情報を、第2の前記マーカに関する設定において利用可能とする、教示装置である。
【0009】
本開示の別の態様は、作業空間に設置されたマーカを視覚センサにより計測するための方法であって、第1の前記マーカについて計測を行い、第1の前記マーカの計測結果の精度を評価し、前記第1のマーカの計測結果の精度が所定のレベル未満である場合に、追加の1以上の前記マーカについて計測を行うこと、を含み、第1の前記マーカの計測に関して入力された設定情報を、追加の1以上の前記マーカの各々の計測に関する設定情報の設定として利用可能とされた、ユーザインタフェースが提供される、マーカ計測方法である。
【0010】
本開示の更に別の態様は、視覚センサで1のマーカを計測する場合の計測に関する第1の設定情報の入力を受け付け、前記第1のマーカに関して入力された前記第1の設定情報を利用できるやり方で、前記視覚センサで第2のマーカを計測する場合の計測に関する第2の設定情報の入力を受け付ける、ユーザインタフェースを提供する動作を、コンピュータに実行させるプログラムである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
23日前
株式会社不二越
ロボット
15日前
株式会社エビス
腰ベルト用連結具
1か月前
個人
深孔スリーブ駆動ロッド構造
1か月前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
梅馨堂合同会社
人協働ロボットシステム
1か月前
川崎重工業株式会社
制動システム
15日前
株式会社アイエイアイ
グリッパー
4日前
株式会社イノウ
給油口キャップ用開閉具
16日前
庄内機械株式会社
釘打装置
2日前
住友重機械工業株式会社
ロボット
9日前
株式会社不二越
垂直多関節ロボット
16日前
トヨタ自動車東日本株式会社
搬送治具
2日前
アイホン株式会社
ネジ締めカウントシステム
17日前
芝浦機械株式会社
双腕ロボット
8日前
トヨタ自動車株式会社
荷姿影響緩和方法
5日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
16日前
パナソニック株式会社
工具
16日前
住友重機械工業株式会社
ロボット及びカバー
9日前
学校法人法政大学
装着型アシスト装置
1か月前
株式会社マキタ
電動工具
2日前
アピュアン株式会社
エアー式衝撃工具
1か月前
株式会社ダイヘン
端末装置
2日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社マキタ
打ち込み工具
17日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
9日前
住友重機械工業株式会社
アクチュエータ支持部材
8日前
株式会社マキタ
打ち込み工具
2日前
株式会社マキタ
打ち込み工具
2日前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
インパクト工具
1か月前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
SB C&S株式会社
治具セット
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ