TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025074464
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2023185278
出願日
2023-10-30
発明の名称
作業用車両の動作制御システム
出願人
株式会社竹内製作所
代理人
めぶき弁理士法人
主分類
E02F
9/22 20060101AFI20250507BHJP(水工;基礎;土砂の移送)
要約
【課題】選択画面から、オペレーターが自分の技量や作業内容に応じたレベルを選択するといった簡単な操作を行うだけで、作業用車両の動作部の動作速度に制限をかけることができ、それによって、作業用車両の操作に不慣れなオペレーターであっても、作業用車両を余裕を持って動作させることができるようにする。
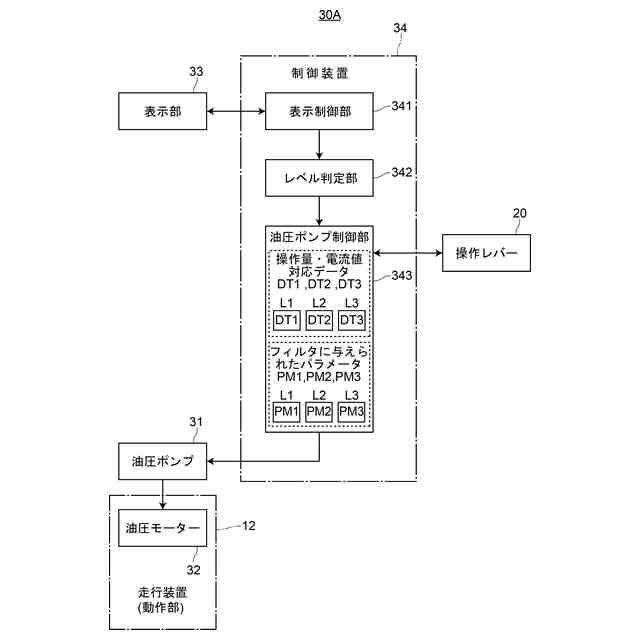
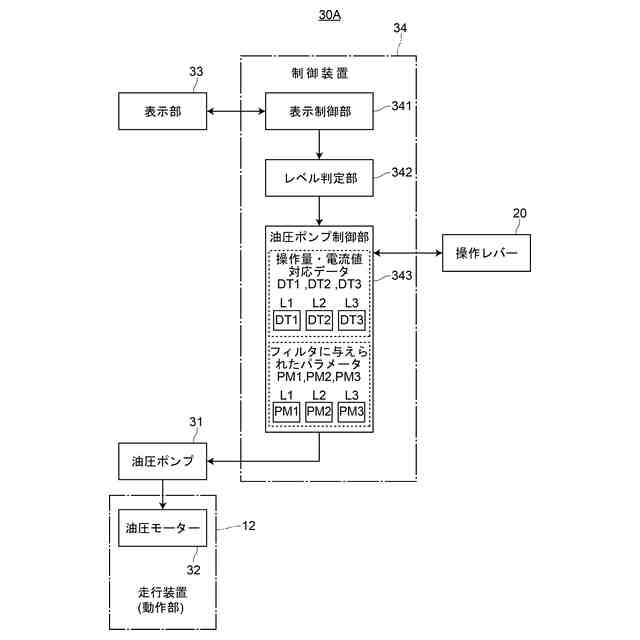
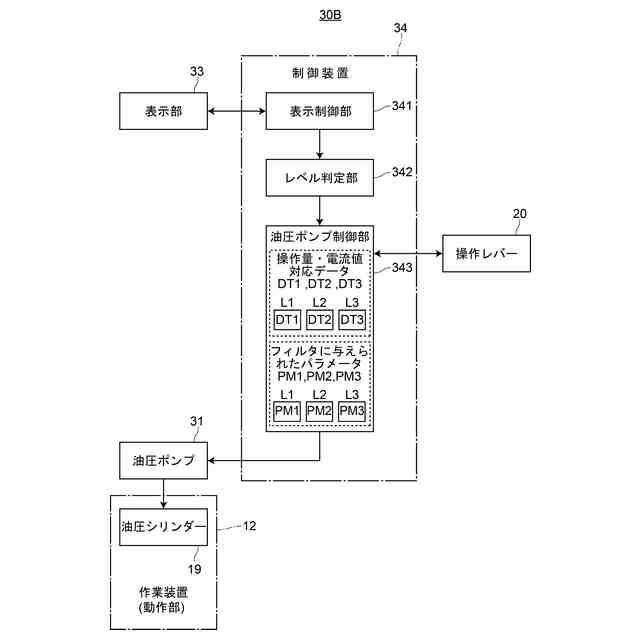
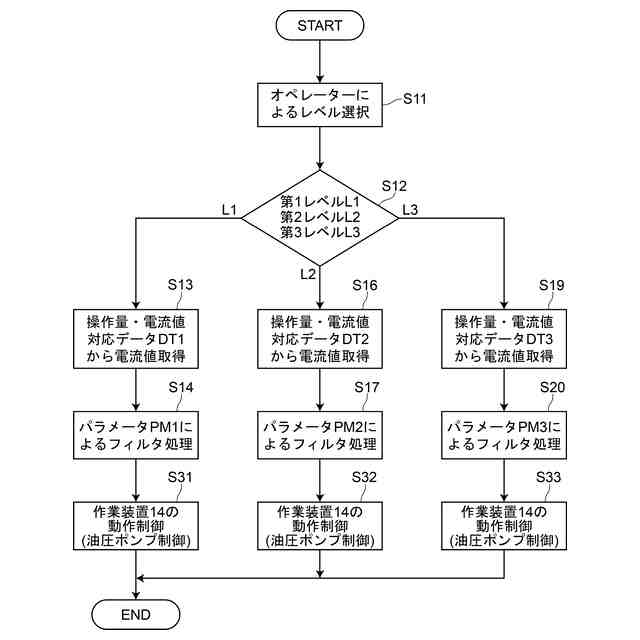
【解決手段】n段階(nは2以上の整数)のレベルからオペレーターが選択したレベルに基づいて油圧ポンプを制御する油圧ポンプ制御部343を有する制御装置34を備える。油圧ポンプ制御部343は、操作レバーの操作量と電流値とが対応付けられた操作量・電流値対応データを、n段階のレベルの各レベルに対応して有する。そして、オペレーターが選択したレベルに対応した操作量・電流値対応データから、現時点の操作レバーの操作量に対する電流値を取得して、取得した電流値に基づいて、油圧ポンプが吐出する圧油の吐出量を制御する。
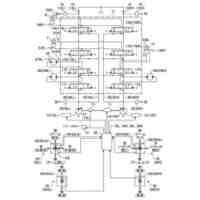
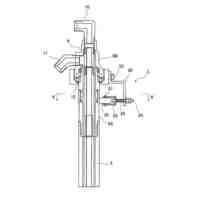
【選択図】図2
特許請求の範囲
【請求項1】
操作レバーの操作により出力される電流値に基づいて油圧ポンプを制御することにより、動作部の動作制御を行う作業用車両の動作制御システムであって、
前記動作部が動作する際の動作速度に対して第1レベル~第nレベルのn段階(nは2以上の整数)のレベルが設定されており、
油圧ポンプと、
前記n段階のレベルの中からいずれかのレベルをオペレーターが選択可能とするための選択画面を表示する表示部と、
前記オペレーターが選択したレベルに基づいて、前記油圧ポンプを制御する油圧ポンプ制御部を有する制御装置と、
を備え、
前記油圧ポンプ制御部は、
前記オペレーターが選択したレベルに応じて前記電流値を制限し、制限した電流値に基づいて、前記油圧ポンプが吐出する圧油の吐出量を制御することを特徴とする作業用車両の動作制御システム。
続きを表示(約 2,400 文字)
【請求項2】
請求項1に記載の作業用車両の動作制御システムにおいて、
前記動作部の動作制御は、前記作業用車両が有する走行装置の走行速度を制御する走行速度制御であり、前記走行装置の走行速度に対して第1レベル~第nレベルのn段階のレベルが設定されており、
前記油圧ポンプから吐出される圧油によって駆動される走行用の油圧モーターを備え、
前記油圧ポンプ制御部は、
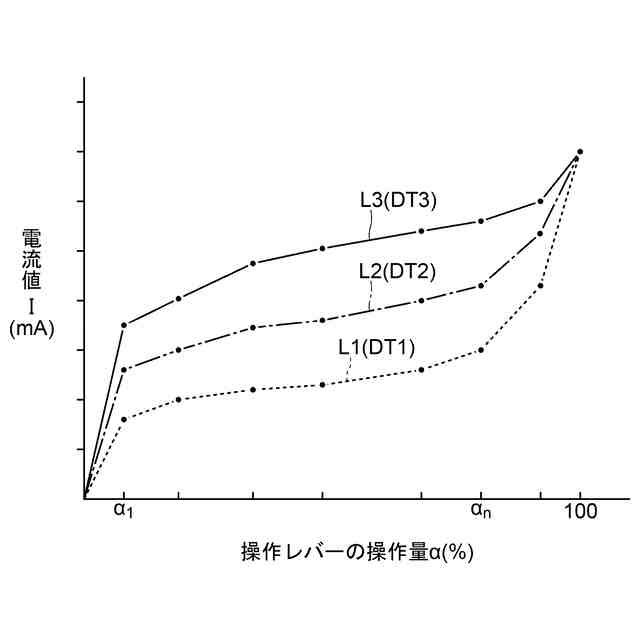
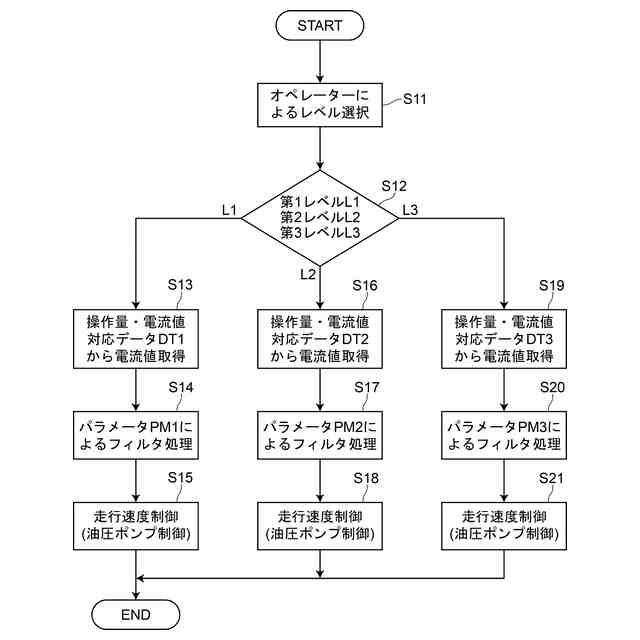
前記操作レバーの操作量と前記電流値とが対応付けられた操作量・電流値対応データを、前記n段階のレベルの各レベルに対応して有し、前記オペレーターが選択したレベルに対応した前記操作量・電流値対応データから、現時点の操作レバーの操作量に対する電流値を取得して、取得した電流値に基づいて、前記油圧ポンプが吐出する圧油の吐出量を制御することを特徴とする作業用車両の動作制御システム。
【請求項3】
請求項1に記載の作業用車両の動作制御システムにおいて、
前記動作部の動作制御は、前記作業用車両が有する作業装置の動作速度を制御する作業装置の動作速度制御であり、前記作業装置の動作速度に対して第1レベル~第nレベルのn段階のレベルが設定されており、
前記油圧ポンプから吐出される圧油によって駆動される油圧シリンダーを備え、
前記油圧ポンプ制御部は、
前記操作レバーの操作量と前記電流値とが対応付けられた操作量・電流値対応データを、前記n段階のレベルの各レベルに対応して有し、前記オペレーターが選択したレベルに対応した前記操作量・電流値対応データから、現時点の操作レバーの操作量に対する電流値を取得して、取得した電流値に基づいて、前記油圧ポンプが吐出する圧油の吐出量を制御することを特徴とする作業用車両の動作制御システム。
【請求項4】
請求項2又は3に記載の作業用車両の動作制御システムにおいて、
前記各レベルに対応した操作量・電流値対応データは、前記操作レバーの操作量に対応する電流値が、前記第1レベル~第nレベルの順で昇順又は降順に設定されていることを特徴とする作業用車両の動作制御システム。
【請求項5】
請求項2又は3に記載の作業用車両の動作制御システムにおいて、
前記油圧ポンプ制御部は、前記電流値の変化を抑制するためのパラメーターが各レベルに対応して設定されたフィルターによって前記電流値をフィルター処理し、
前記パラメーターは、前記各レベルに対応した操作量・電流値対応データにおける電流値の変化の大きさに応じた値を有することを特徴とする作業用車両の動作制御システム。
【請求項6】
請求項1に記載の作業用車両の動作制御システムにおいて、
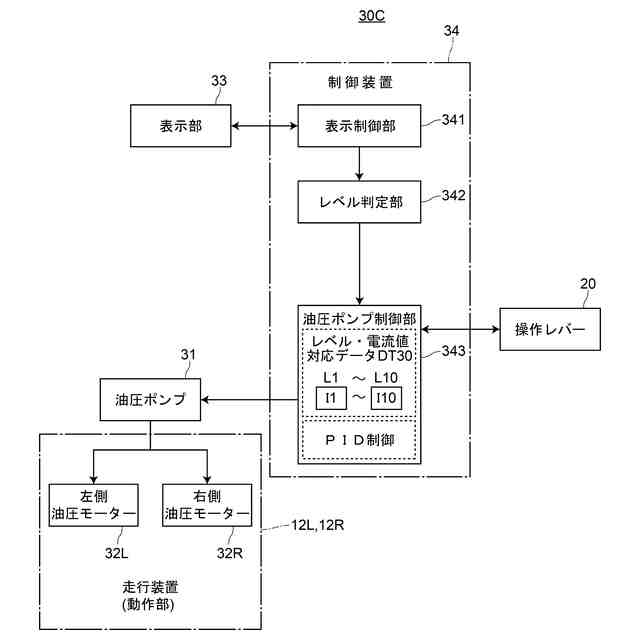
前記動作部の動作制御は、前記作業用車両が有する左右一対の走行装置のうちの左側走行装置の走行速度を制御するための左側走行速度制御、及び、前記作業用車両が有する左右一対の走行装置のうちの右側走行装置の走行速度を制御するための右側走行速度制御であり、前記左側走行装置の走行速度に対しては第1レベル~第nレベルのn段階(nは2以上の整数)のレベルが左レベルとして設定されているとともに、前記右側走行装置の走行速度に対しては第1レベル~第nレベルのn段階のレベルが右レベルとして設定されており、
前記表示部は、前記n段階の左レベル、及び、前記n段階の右レベルの中からいずれかのレベルをオペレーターが選択可能とするための選択画面を表示し、
前記油圧ポンプから吐出される圧油によって駆動される左側油圧モーター及び右側油圧モーターを備え、
前記油圧ポンプ制御部は、
前記n段階の左レベルの各レベルに対応して電流値が設定されている左レベル・電流値対応データを有するとともに、前記n段階の右レベルの各レベルに対応して電流値が設定された右レベル・電流値対応データを有し、
前記n段階の左レベルの中から前記オペレーターが選択したレベルに対応した電流値を、前記左レベル・電流値対応データから取得して、取得した電流値に基づいて、前記油圧ポンプに対し、前記左側油圧モーターを駆動するための圧油の吐出量を制御し、
前記n段階の右レベルの中から前記オペレーターが選択したレベルに対応した電流値を、前記右レベル・電流値対応データから取得して、取得した電流値に基づいて、前記油圧ポンプに対し、前記右側油圧モーターを駆動するための圧油の吐出量を制御する、
ことを特徴とする作業用車両の動作制御システム。
【請求項7】
請求項6に記載の作業用車両の動作制御システムにおいて、
前記左レベル・電流値対応データの各レベル及び前記右レベル・電流値対応データの各レベルに対応して設定されている電流値の大きさが、第1レベル~第nレベルの順で昇順又は降順に設定されていることを特徴とする作業用車両の動作制御システム。
【請求項8】
請求項6又は7に記載の作業用車両の動作制御システムにおいて、
前記油圧ポンプ制御部は、前記左側走行装置の走行速度及び前記右側走行装置の走行速度がそれぞれ前記選択されたレベルに対応する速度となるようにPID(Proportional Integral Derivative)制御をさらに行うことを特徴とする作業用車両の動作制御システム。
【請求項9】
請求項8に記載の作業用車両の動作制御システムにおいて、
前記PID制御は、
前記左側油圧モーターの回転数及び前記右側油圧モーターの回転数に、前記各レベルに対応する目標値を設定し、前記左側油圧モーターの回転数及び前記右側油圧モーターの回転数が設定された目標値となるように前記油圧ポンプを制御する、
ことを特徴とする作業用車両の動作制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業用車両の動作制御システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
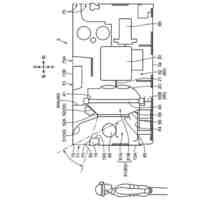
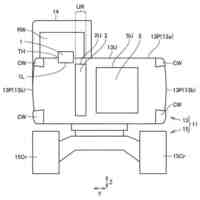
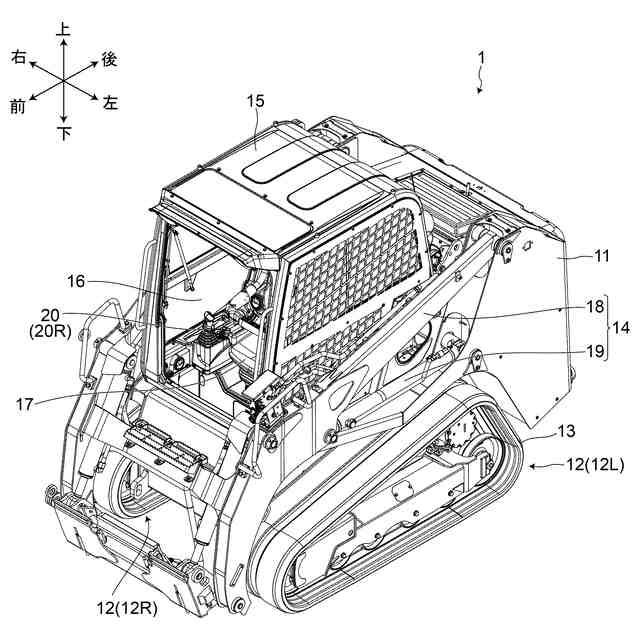
作業用車両としては、例えば、クローラー式スキッドステアローダが広く知られている。このような作業用車両は、車両本体に上下動自在に設けられているアームの先端にはバケットなどのアタッチメントが着脱自在に取り付けられている。そして、バケットを例えば上下に揺動させることによって、掘削した土砂の移動など種々の作業を行うことができる。なお、アタッチメントを作業目的に応じて着脱交換することにより、種々の作業を行うことができる。
【0003】
また、この種の作業用車両は、車両上部にオペレーターが搭乗するキャビンが設けられている。キャビンにはオペレーターが着座するシートが設けられており、シートの近傍には、作業用車両を走行動作させるための操作レバーと、バケットなどのアタッチメントを動作させるための操作レバーとが設けられている(特許文献1参照)。
【0004】
特許文献1に記載されている作業用車両は、作業用車両を走行動作させたり、バケットなどのアタッチメントなどを動作させたりする際には、それぞれに対応して設けられている操作レバーを操作することによってオペレーターの所望とする動作が可能となる。
【先行技術文献】
【特許文献】
【0005】
特開2022-56577号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したような作業用車両において、オペレーターの所望とする動作速度に制限した上で作業用車両の動作部を動作させたいといった要望がある。特に、作業用車両の操作に不慣れなオペレーターにとっては、動作部の動作速度が速いと余裕を持った操作が行えない場合もある。従って、作業用車両の操作に不慣れなオペレーターにとっては、自分の技量や作業内容に応じた動作速度で作業用車両の動作部を動作させたいといった要望がある。ここで、作業用車両の動作部というのは、作業用車両を走行させるための走行装置及び作業を行うための作業装置を指している。なお、走行装置には、クローラーや走行用の油圧モーターなどが含まれる。また、作業装置には、バケットなどのアタッチメントや油圧シリンダーなどが含まれる。
【0007】
また、作業用車両を直進走行させる際に、左右いずれかのクローラーに摩耗があったり、バケット内に土砂などが片寄って積まれていたりすると、オペレーターの意図しない方向に曲がって進行してしまう場合がある。このような場合、オペレーターは作業用車両の進行方向の修正を行うための操作を行う必要がある。しかしながら、作業用車両の操作に不慣れなオペレーターにとっては進行方向の修正を適切に行えない場合もある。
【0008】
上述した作業用車両の走行速度の制御、作業装置の動作速度の制御及び作業用車両の直進性維持のための制御は、いずれも、作業用車両の動作部の動作速度を制御することによって行うことができる。このとき、作業用車両の動作部の動作速度に制限をかけることができれば、作業用車両の操作に不慣れなオペレーターであっても、作業用車両を余裕を持って動作させることができる。
【0009】
本発明は上述した課題を解決するためになされたものであり、表示部に表示された選択画面から、オペレーターが自分の技量や作業内容に応じたレベルを選択するといった簡単な操作を行うだけで、作業用車両の動作部の動作速度に制限をかけることができ、それによって、作業用車両の操作に不慣れなオペレーターであっても、作業用車両を余裕を持って動作させることができる作業用車両の動作制御システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
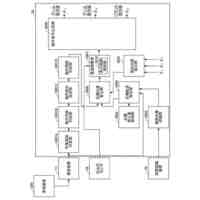
[1]本発明の作業用車両の動作制御システムは、操作レバーの操作により出力される電流値に基づいて油圧ポンプを制御することにより、動作部の動作制御を行う作業用車両の動作制御システムであって、前記動作部が動作する際の動作速度に対して第1レベル~第nレベルのn段階(nは2以上の整数)のレベルが設定されている。そして、本発明の作業用車両の動作制御システムは、油圧ポンプと、前記n段階のレベルの中からいずれかのレベルをオペレーターが選択可能とするための選択画面を表示する表示部と、前記オペレーターが選択したレベルに基づいて、前記油圧ポンプを制御する油圧ポンプ制御部を有する制御装置と、を備え、前記油圧ポンプ制御部は、前記オペレーターが選択したレベルに応じて前記電流値を制限し、制限した電流値に基づいて、前記油圧ポンプが吐出する圧油の吐出量を制御することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
長尺平板パネル
28日前
個人
透過型堰堤
15日前
個人
構造物の検査方法
29日前
株式会社東部
多翼型鋼管杭
1か月前
鹿島建設株式会社
鉄筋かご
13日前
個人
津波防御三段壁浮上システム。
21日前
中部電力株式会社
沈砂池
13日前
株式会社竹中工務店
壁接合工法
1日前
カナデビア株式会社
起伏ゲート
29日前
住友建機株式会社
ショベル
今日
日本車輌製造株式会社
杭打機
1か月前
株式会社エコ・プランナー
取水装置
今日
カナデビア株式会社
浮体構造体
21日前
コベルコ建機株式会社
操作装置
1日前
コベルコ建機株式会社
作業機械
13日前
コベルコ建機株式会社
作業機械
13日前
株式会社奥村組
建物の基礎構造
7日前
中部美化企業株式会社
水門装置
7日前
コベルコ建機株式会社
作業機械
13日前
住友重機械工業株式会社
作業機械
今日
株式会社ダイトー
護岸コンクリートの補修構造
今日
鹿島建設株式会社
埋戻し方法
21日前
東陽商事株式会社
スイベルの共回り防止装置
15日前
構法開発株式会社
埋込継手構造
28日前
プレス工業株式会社
建設機械のキャビン
13日前
個人
大規模真空沸騰圧密工法と大深度気水分離タンク
今日
カナデビア株式会社
係留装置及びその制御方法
29日前
株式会社小松製作所
作業機械
2日前
株式会社クボタ
フロントローダ及び作業車両
28日前
株式会社竹内製作所
土砂侵入防止構造
7日前
株式会社小松製作所
作業車両
2日前
株式会社SEELS
フェンダー用カバー部材
22日前
キヤノン株式会社
移動体および撮像装置
2日前
日立建機株式会社
作業機械
1か月前
マックストン株式会社
シート敷設用アンカーブロック
14日前
コベルコ建機株式会社
作業機械
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ