TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025075520
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023186749
出願日
2023-10-31
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
弁理士法人筒井国際特許事務所
主分類
B25C
1/00 20060101AFI20250508BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】利便性が向上した作業機を提供する。
【解決手段】釘打機10は、射出部42と、打撃部48と、駆動部56と、マガジン74と、フィーダ92と、第1規制部100と、第2規制部120と、を有する。射出部42は、釘Nを射出する。打撃部48は、釘Nを打撃する。駆動部56は、打撃部48を打撃前の待機位置P1に移動させる。マガジン74は、複数の釘Nを支持する。フィーダ92は、釘Nを射出部42に供給する。第1規制部100は、駆動部56による打撃部48の移動に伴い、フィーダ92のK方向での射出部42側への移動を規制する規制位置と、フィーダ92のK方向での射出部42側への移動を規制しない解除位置と、に変位可能である。第2規制部120は、所定の条件下で、第1規制部100が規制位置から解除位置に変位するときに動作することで、フィーダ92のK方向での射出部42側への移動を規制する。
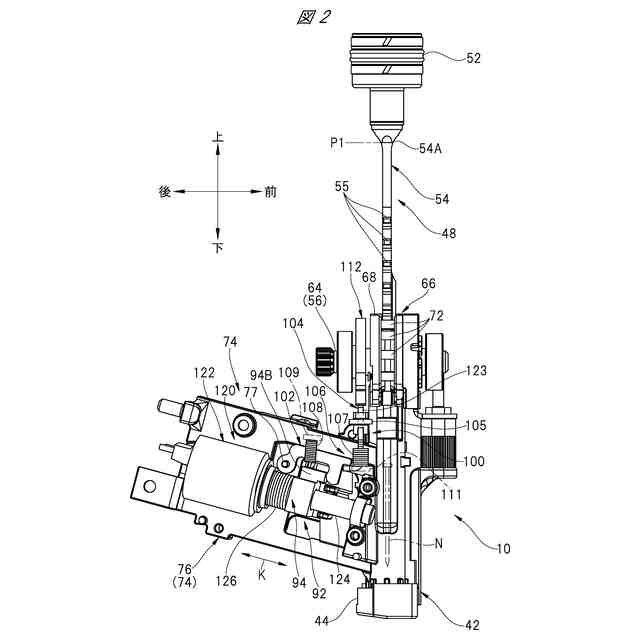
【選択図】図2
特許請求の範囲
【請求項1】
止具を射出する射出部と、
前記射出部に位置する前記止具を打撃する打撃部と、
前記打撃部を駆動する駆動部と、
複数の前記止具を支持するマガジンと、
第1方向での前記射出部側に移動することで、前記マガジンに支持された前記止具を前記射出部に供給するフィーダと、
前記駆動部による前記打撃部の移動に伴い、前記フィーダの前記第1方向での前記射出部側への移動を規制する規制位置と、前記フィーダの前記第1方向での前記射出部側への移動を規制しない解除位置と、に変位可能な第1規制部と、
所定の条件下で、前記第1規制部が前記規制位置から前記解除位置に変位するときに動作することで、前記フィーダの前記第1方向での前記射出部側への移動を規制する第2規制部と、
を有する、作業機。
続きを表示(約 1,500 文字)
【請求項2】
前記駆動部は、前記打撃部を打撃前の第1位置に移動させ、
前記打撃部は、前記第1位置から移動して前記止具を打撃し、前記駆動部の駆動によって再度、前記第1位置に戻る一連の打撃動作を実行可能であり、
前記所定の条件は、前記打撃部が前記一連の打撃動作を実行していない場合に、前記駆動部が前記打撃部を駆動することを含む、
請求項1に記載の作業機。
【請求項3】
前記一連の打撃動作中に、前記第1規制部が前記規制位置から前記解除位置に変位するとき、前記第2規制部は前記フィーダの移動を規制する動作を停止する、
請求項2に記載の作業機。
【請求項4】
前記駆動部は、前記一連の打撃動作中に第1回転方向に回転することで前記打撃部を前記第1位置に移動させる回転部を有し、
前記所定の条件は、前記回転部が前記第1回転方向とは逆方向である第2回転方向に回転することを含む、
請求項2に記載の作業機。
【請求項5】
前記打撃部は、前記回転部と係合可能であり、
前記打撃部を前記第1方向と交差する第2方向での前記射出部側へ付勢する打撃力生成部と、
作業者によって操作される操作部と、
前記打撃部と前記回転部との係合に異常があるか否かを検知する検知部と、
をさらに有し、
前記打撃部は、前記一連の打撃動作において、
前記操作部が操作された場合、前記回転部と係合した状態で前記回転部が回転することで、前記打撃力生成部の付勢力に抗して、前記第2方向での前記射出部側とは反対側へ前記第1位置から第2位置まで移動する第1動作と、
前記回転部の回転に伴って前記回転部との係合が解除されることで、前記打撃力生成部の付勢力によって前記第2位置から前記第2方向での前記射出部側の第3位置まで移動して前記止具を打撃する第2動作と、
前記回転部と再び係合した状態で前記回転部が回転することで、前記打撃力生成部の付勢力に抗して前記第2方向での前記射出部側とは反対側へ前記第3位置から前記第1位置まで移動する第3動作と、を実施可能であり、
前記駆動部は、前記第3動作において前記検知部が異常を検知した場合、前記回転部を前記第2回転方向に回転させる、
請求項4に記載の作業機。
【請求項6】
作業者によって操作される操作部と、
第1モード及び第2モードを含む複数のモードで前記駆動部の駆動を制御する制御部と、をさらに有し、
前記駆動部は、前記制御部が前記第1モードのときに作業者によって前記操作部に操作がなされた場合に、前記打撃部に前記一連の打撃動作を実行させ、前記制御部が前記第2モードのときに作業者によって前記操作部に操作がなされた場合に、前記打撃部に前記一連の打撃動作と異なる特殊動作を実行させ、
前記所定の条件は、前記打撃部が前記特殊動作を実行中であることである、請求項2に記載の作業機。
【請求項7】
前記駆動部は、前記特殊動作において、前記一連の打撃動作における駆動時間よりも短い時間だけ前記打撃部を駆動したのちに停止する、請求項6に記載の作業機。
【請求項8】
前記第2規制部は、通電することで前記フィーダを前記第1方向での前記射出部側とは反対側へ移動させるソレノイドを有する、請求項1乃至請求項7の何れか一項に記載の作業機。
【請求項9】
前記フィーダを前記第1方向での前記射出部側へ付勢するフィーダ付勢部をさらに備える、請求項1乃至請求項7の何れか一項に記載の作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1に記載された打込機は、マガジンに収容されている釘を射出部に供給する供給部と、射出部の釘を打撃する打撃部と、を有する。供給部では、回動するフィーダの突起部が釘に接触することで、釘が射出部に供給される。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/084993号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の打込機において、適切なタイミングで射出部に釘を供給して、釘を打撃する場合、フィーダの動作と打撃部の動作とを連動させる機構部を設ける方法がある。
【0005】
しかしながら、フィーダによる釘の供給動作と打撃部による釘の打撃動作とを、機構部を用いて連動させた構成では、打撃部において通常の打撃動作とは異なる動作が行われた場合、機構部を介してフィーダが動作してしまう可能性がある。このため、射出部に複数の釘が装填されるなどの理由により、打撃不良が生じる虞があった。
【0006】
本発明の目的は、利便性が向上した作業機を提供することにある。
【課題を解決するための手段】
【0007】
一実施形態の作業機は、射出部と、打撃部と、駆動部と、マガジンと、フィーダと、第1規制部と、第2規制部と、を有する。前記射出部は、止具を射出する。前記打撃部は、前記射出部に位置する前記止具を打撃する。前記駆動部は、前記打撃部を駆動する。前記マガジンは、複数の前記止具を支持する。前記フィーダは、第1方向での前記射出部側に移動することで、前記マガジンに支持された前記止具を前記射出部に供給する。前記第1規制部は、前記駆動部による前記打撃部の移動に伴い、前記フィーダの前記第1方向での前記射出部側への移動を規制する規制位置と、前記フィーダの前記第1方向での前記射出部側への移動を規制しない解除位置と、に変位可能である。前記第2規制部は、所定の条件下で、前記第1規制部が前記規制位置から前記解除位置に変位するときに動作することで、前記フィーダの前記第1方向での前記射出部側への移動を規制する。
【発明の効果】
【0008】
本発明によれば、作業機の利便性を向上させることができる。
【図面の簡単な説明】
【0009】
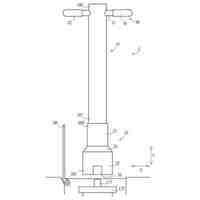
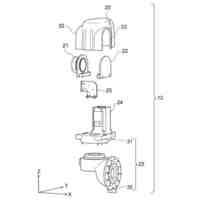
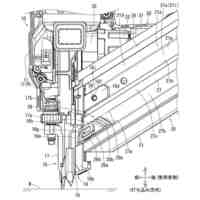
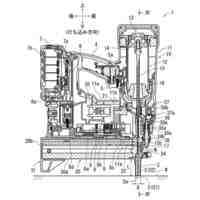
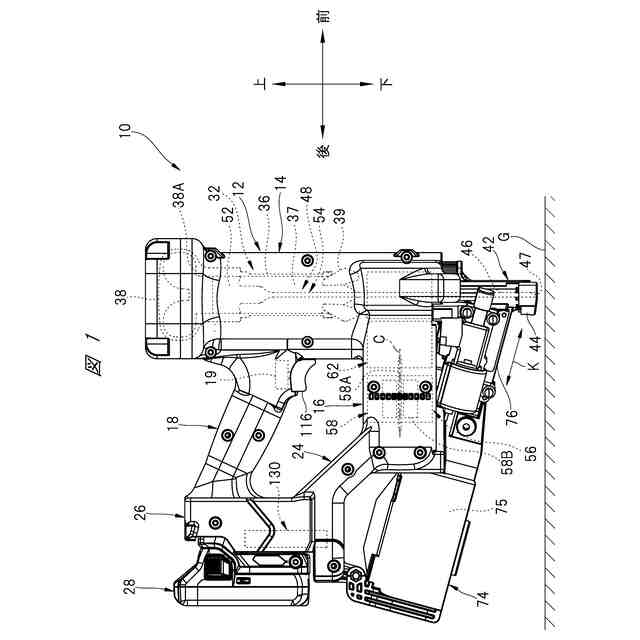
第1実施形態の釘打機の外観を示す右側面図である。
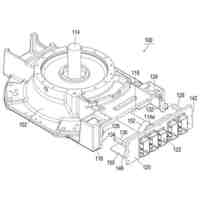
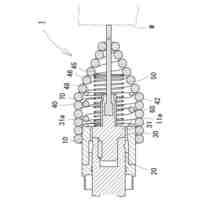
打撃部が待機位置にある場合の釘打機の内部構造を示す右側面図である。
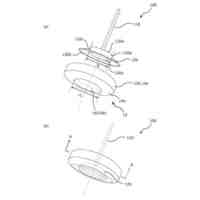
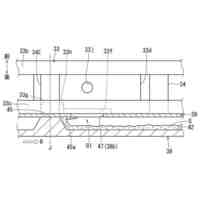
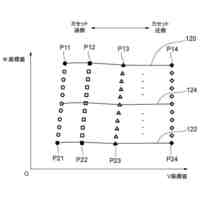
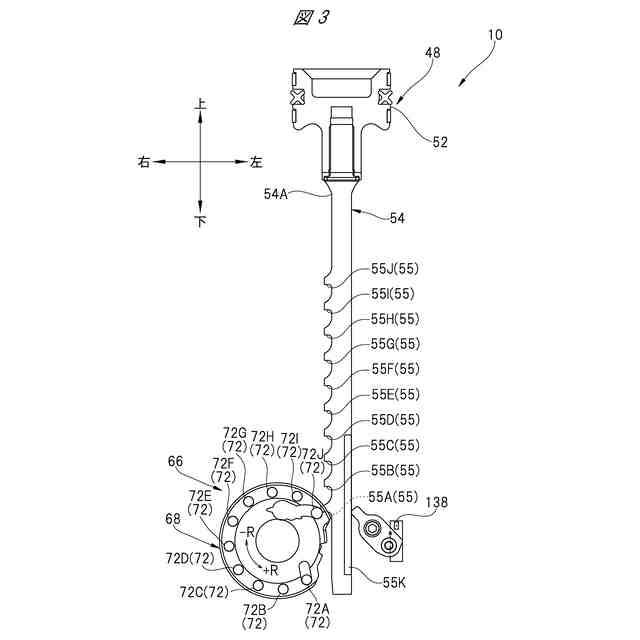
ドライバブレードのラックとピニオンホイールのピニオンピンとの対応関係を示す説明図である。
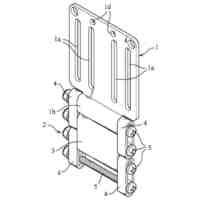
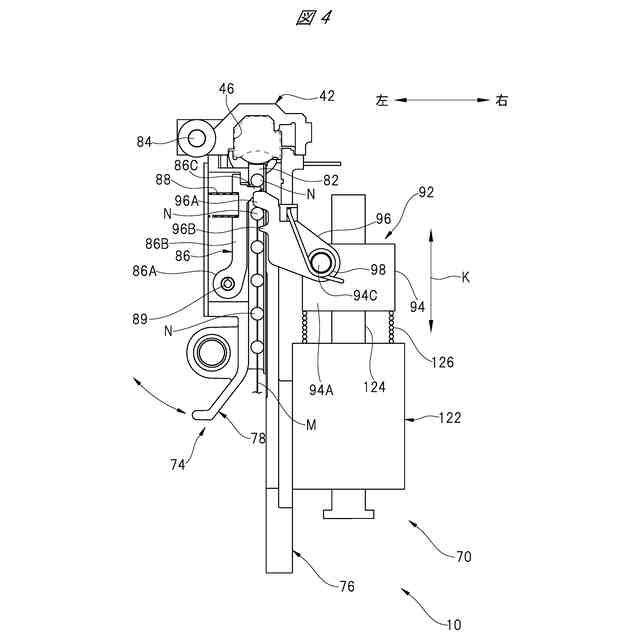
フィーダが供給通路内の釘を射出部に供給する直前の状態を示す説明図である。
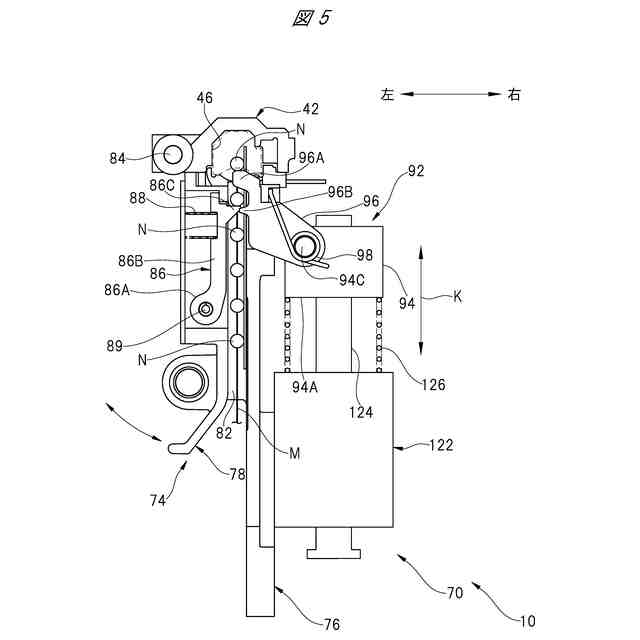
フィーダが供給通路内の釘を射出部に供給した直後の状態を示す説明図である。
打撃部が待機位置にある場合の釘打機の内部構造を示す背面図である。
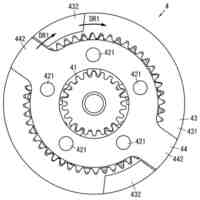
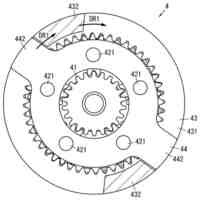
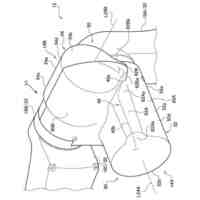
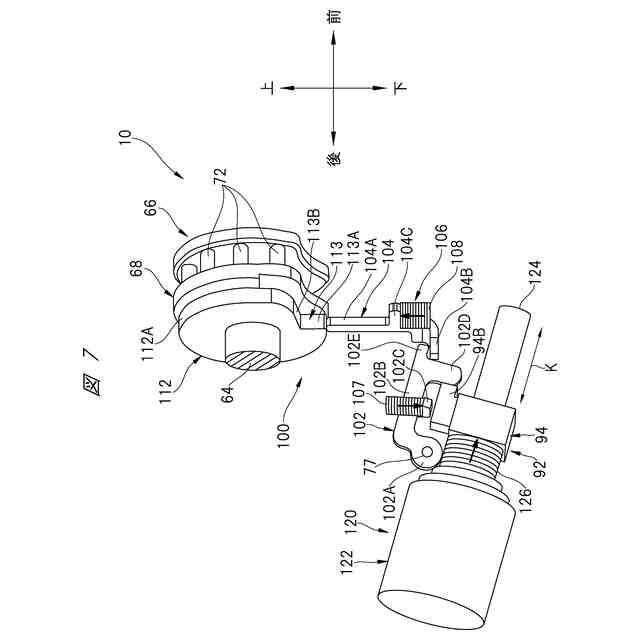
図2のピンホイール、カム、フィーダ及びラッチ機構部の配置関係を示す説明図である。
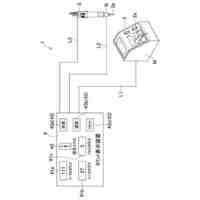
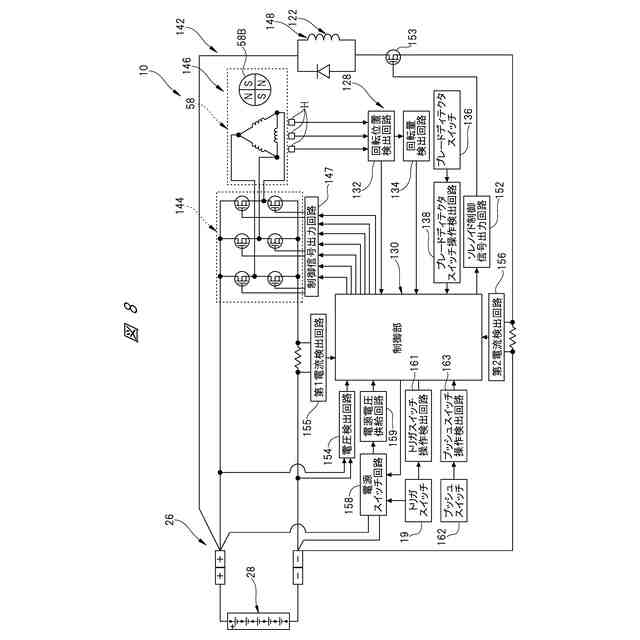
図1の釘打機の各構成を示す回路ブロック図である。
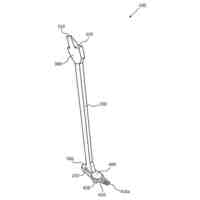
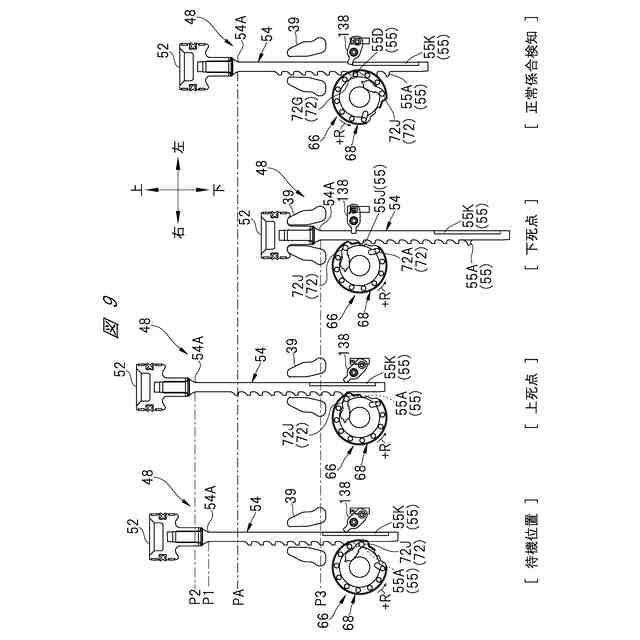
ピンホイールとドライバブレードが正常に係合している場合のピンホイールの回転に伴うドライバブレードの変位状態を示す説明図である。
ピンホイールとドライバブレードとの係合の掛け違いを解消する場合のピンホイールの回転に伴うドライバブレードの変位状態を示す説明図である。
第1実施形態の釘打機において実行される掛け違い解除の処理を含むフローチャートである。
第1実施形態の釘打機の各動作時点におけるドライバブレード変位、射出口の釘の有無、フィーダ変位、ソレノイド電流及びピンホイール回転角度を示すタイミングチャートである。
第2実施形態の釘打機において実行されるメンテナンスモードの処理を示すフローチャートである。
第2実施形態の釘打機の各動作時点におけるドライバブレード変位、射出口の釘の有無、フィーダ変位、ソレノイド電流及びピンホイール回転角度を示すタイミングチャートである。
第3実施形態の釘打機において実行されるメンテナンスモードの処理を示すフローチャートである。
第3実施形態の釘打機の各動作時点におけるドライバブレード変位、爪部材変位、射出口の釘の有無、フィーダ変位、ソレノイド電流及びピンホイール回転角度を示すタイミングチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態として、第1、第2、第3実施形態及び変形例について図面を参照しながら詳細に説明する。なお、実施形態及び変形例を説明するために参照する全ての図面において、同一または実質的に同一の構成や要素には同一の符号を用いる。また、一度説明した構成や要素については、原則として繰り返しの説明は行わない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
23日前
株式会社不二越
ロボット
15日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社イノウ
給油口キャップ用開閉具
16日前
川崎重工業株式会社
制動システム
15日前
株式会社アイエイアイ
グリッパー
4日前
庄内機械株式会社
釘打装置
2日前
住友重機械工業株式会社
ロボット
9日前
株式会社不二越
垂直多関節ロボット
16日前
アイホン株式会社
ネジ締めカウントシステム
17日前
芝浦機械株式会社
双腕ロボット
8日前
トヨタ自動車東日本株式会社
搬送治具
2日前
トヨタ自動車株式会社
荷姿影響緩和方法
5日前
パナソニック株式会社
工具
16日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
16日前
アピュアン株式会社
エアー式衝撃工具
1か月前
住友重機械工業株式会社
ロボット及びカバー
9日前
学校法人法政大学
装着型アシスト装置
1か月前
株式会社マキタ
電動工具
2日前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社ダイヘン
端末装置
2日前
株式会社マキタ
打ち込み工具
2日前
株式会社マキタ
打ち込み工具
2日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
9日前
住友重機械工業株式会社
アクチュエータ支持部材
8日前
株式会社マキタ
打ち込み工具
17日前
株式会社マキタ
インパクト工具
1か月前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社マキタ
インパクト工具
1か月前
SB C&S株式会社
治具セット
1か月前
株式会社不二越
ロボットの教示システム及び教示方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ