TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084288
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198073
出願日
2023-11-22
発明の名称
モータ駆動装置、モータシステムおよびモータの駆動方法
出願人
株式会社豊田自動織機
代理人
弁理士法人深見特許事務所
主分類
H02P
21/26 20160101AFI20250527BHJP(電力の発電,変換,配電)
要約
【課題】モータの脱調を防止しつつ、モータを速やかに始動する。
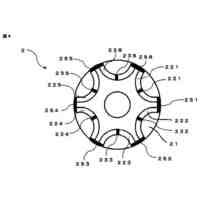
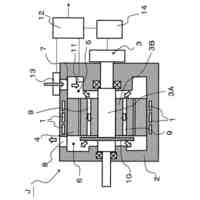
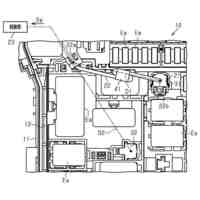
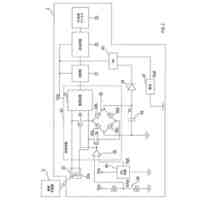
【解決手段】モータ駆動装置2は、電力変換装置21と、コントローラ22とを備える。電力変換装置21は、永久磁石を有するロータ301と、コイルが巻回されたステータ302とを含むモータ3を駆動する。コントローラ22は、電力変換装置21を用いたモータ3のセンサレス制御を実行する。コントローラ22は、d軸とγ軸との間に角度差を設けることによってロータ301を加速してモータ3を始動し、ロータ301の加速中に、d軸電流が一定範囲から逸脱せず、かつ、ロータ301の角速度が単調に上昇し、かつ、角度差がゼロを含まない定められた範囲内に維持されるように、電力変換装置201を制御する。
【選択図】図2
特許請求の範囲
【請求項1】
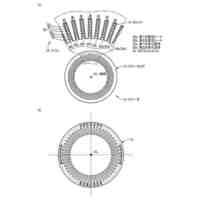
永久磁石を有するロータと、コイルが巻回されたステータとを含むモータを駆動する電力変換装置と、
前記電力変換装置を用いた前記モータのセンサレス制御を実行する制御装置とを備え、
前記制御装置は、
d-q回転座標系におけるd軸と前記d軸を推定したγ軸との間に角度差を設けることによって前記ロータを加速して前記モータを始動し、
前記ロータの加速中に、d軸電流が一定範囲から逸脱せず、かつ、前記ロータの角速度が単調に上昇し、かつ、前記角度差がゼロを含まない定められた範囲内に維持されるように、前記電力変換装置を制御する、モータ駆動装置。
続きを表示(約 1,000 文字)
【請求項2】
前記制御装置は、前記d軸電流が一定であり、かつ、前記角速度が一定レートで上昇し、前記角度差が一定に維持されるように、前記電力変換装置を制御する、請求項1に記載のモータ駆動装置。
【請求項3】
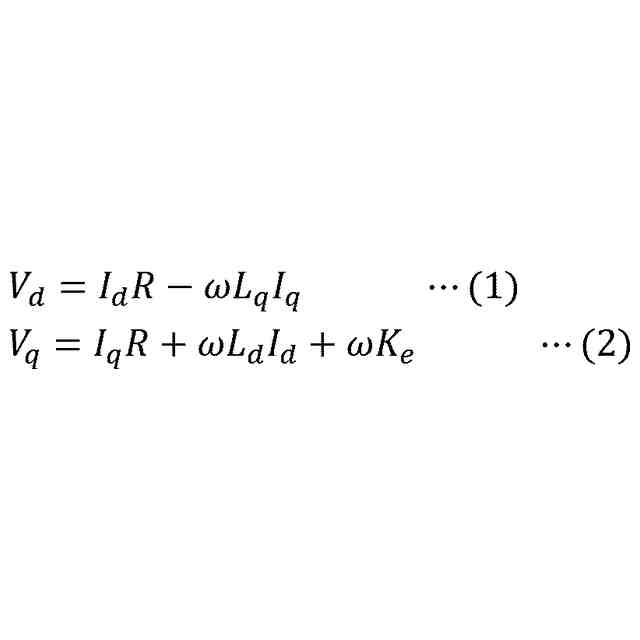
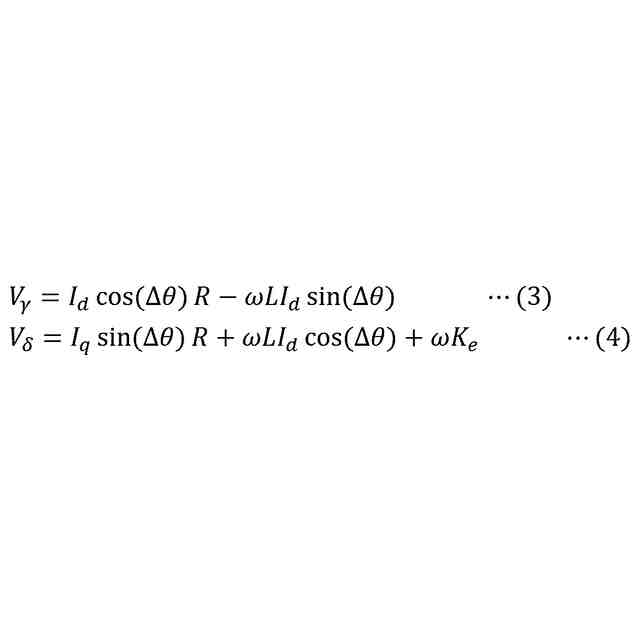
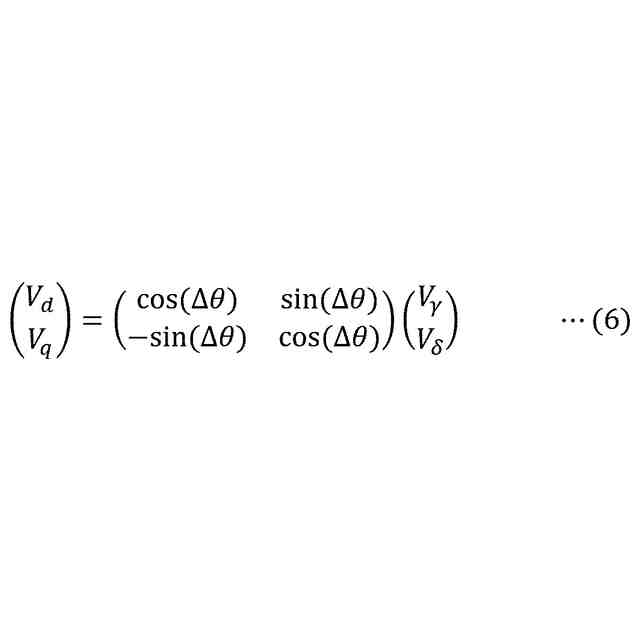
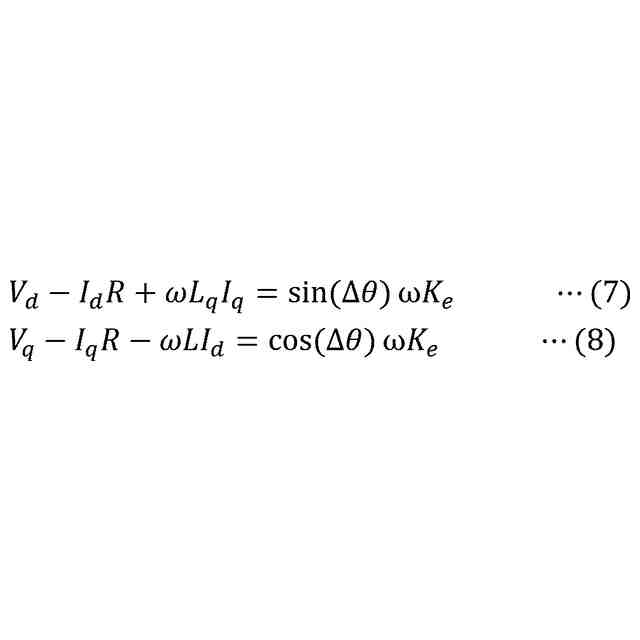
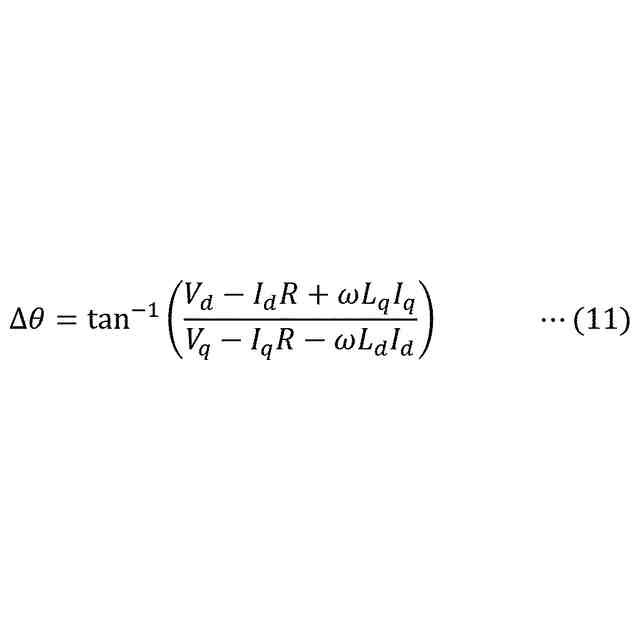
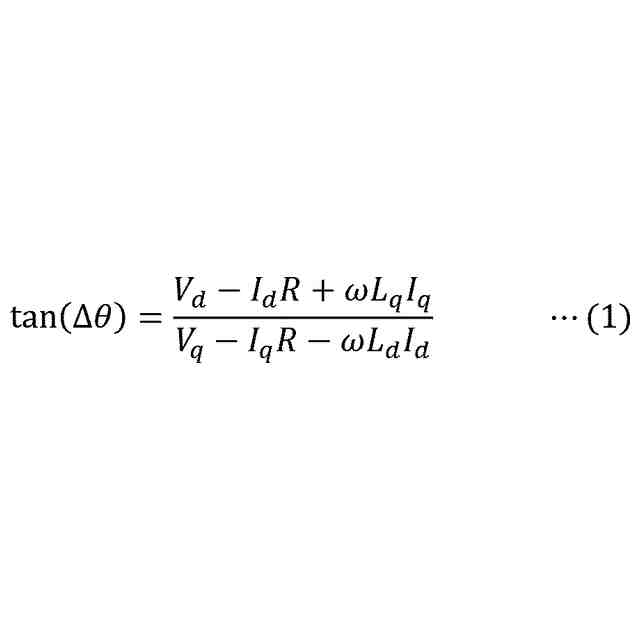
前記制御装置は、以下の式(1)に従って前記角度差を制御し、
TIFF
2025084288000010.tif
13
114
前記式(1)において、Δθは前記角度差を表し、Vdはd軸電圧を表し、Vqはq軸電圧を表し、Idは前記d軸電流を表し、Iqはq軸電流を表し、Rは前記コイルの巻線抵抗を表し、ωは前記角速度を表し、Ldは前記コイルのd軸自己インダクタンスを表し、Lqは前記コイルのq軸自己インダクタンスを表す、請求項1に記載のモータ駆動装置。
【請求項4】
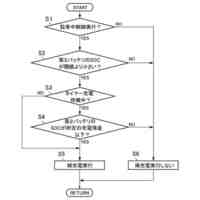
前記制御装置は、前記モータの加速中に前記角度差が第1閾値を上回った場合、前記角度差が前記第1閾値を下回っている場合と比べて、前記角度差を減少させる、請求項1~3のいずれか1項に記載のモータ駆動装置。
【請求項5】
前記制御装置は、前記角度差が前記第1閾値を下回っている場合には、前記角度差を減少させない、請求項4に記載のモータ駆動装置。
【請求項6】
前記制御装置は、前記角度差が前記第1閾値を上回った場合、前記角度差が大きいほど前記角度差の減少量を大きくする、請求項4に記載のモータ駆動装置。
【請求項7】
前記制御装置は、前記モータの加速中に前記角度差が第2閾値を上回った場合、前記モータの劣化を検知する、請求項1~3のいずれか1項に記載のモータ駆動装置。
【請求項8】
前記制御装置は、前記モータの劣化が検知された場合、前記モータの劣化を前記モータ駆動装置の外部に通知する、請求項7に記載のモータ駆動装置。
【請求項9】
前記制御装置は、前記モータの劣化が検知された場合、前記モータの劣化をメモリに記録する、請求項7に記載のモータ駆動装置。
【請求項10】
前記制御装置は、
前記モータの角加速度に基づいて前記角度差を算出し、
前記モータの加速中に前記角度差が第3閾値を上回った場合、前記角度差が前記第3閾値に近付くように前記角加速度を補正する角加速度補正制御を実行する、請求項1~3のいずれか1項に記載のモータ駆動装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ駆動装置、モータシステムおよびモータの駆動方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
ロータの位置を検出する位置センサを用いずにモータを駆動するセンサレス制御の実行中にモータが脱調し得る。モータが脱調すると、過剰なトルク変動が生じたりモータが正常に始動されずに停止したりする可能性がある。特開2011-131725号公報(特許文献1)に開示された電動パワーステアリング装置は、センサレス制御の実行中に発生したモータの脱調を検出する。
【先行技術文献】
【特許文献】
【0003】
特開2011-131725号公報
特開2008-67600号公報
特開2010-4629号公報
特許第6459710号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
センサレス制御を実行するモータ駆動装置において、モータの用途または状況によっては、モータを速やかに始動および/または停止したいという要求が存在する。この要求に応えるためにはロータの角加速度(単位時間当たりのロータの角速度の変化量)を高くすることが求められる。その一方で、ロータの角加速度が高い場合、ロータの角加速度が低い場合と比べて、モータが脱調する可能性が高い。
【0005】
本発明は上記課題を解決するためになされたものであり、本発明の目的の1つは、モータの脱調を防止しつつ、モータを速やかに始動することである。本発明の目的の他の1つは、モータの脱調を防止しつつ、モータを速やかに停止することである。
【課題を解決するための手段】
【0006】
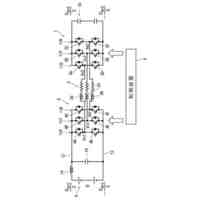
(1)本発明のある局面に係るモータ駆動装置は、電力変換装置と、制御装置とを備える。電力変換装置は、永久磁石を有するロータと、コイルが巻回されたステータとを含むモータを駆動する。制御装置は、電力変換装置を用いたモータのセンサレス制御を実行する。制御装置は、d-q回転座標系におけるd軸とd軸を推定したγ軸との間に角度差を設けることによってロータを加速してモータを始動する。制御装置は、ロータの加速中に、d軸電流が一定範囲から逸脱せず、かつ、ロータの角速度が単調に上昇し、かつ、角度差がゼロを含まない定められた範囲内に維持されるように、電力変換装置を制御する。
【0007】
上記(1)の構成においては、角度差が定められた範囲内に維持される、すなわち、角度差が安定する。これにより、モータが脱調しにくくなる。したがって、角加速度を高い値に設定することが可能になり、モータの始動時間を短縮できる。よって、上記(1)の構成によれば、モータの脱調を防止しつつ、モータを速やかに始動できる。
【0008】
(2)本発明の他の局面に係るモータ駆動装置は、電力変換装置と、制御装置とを備える。電力変換装置は、永久磁石を有するロータと、コイルが巻回されたステータとを含むモータを駆動する。制御装置は、電力変換装置を用いたモータのセンサレス制御を実行する。制御装置は、d-q回転座標系におけるd軸とd軸を推定したγ軸との間に角度差を設けることによってロータを減速してモータを停止する。制御装置は、ロータの減速中に、d軸電流が一定範囲から逸脱せず、かつ、ロータの角速度が単調に低下し、かつ、角度差がゼロを含まない定められた範囲内に維持されるように、電力変換装置を制御する。
【0009】
上記(2)の構成においては、角度差が定められた範囲内に維持される、すなわち、角度差が安定する。これにより、モータが脱調しにくくなる。したがって、角加速度を高い値に設定することが可能になり、モータの停止時間を短縮できる。よって、上記(2)の構成によれば、モータの脱調を防止しつつ、モータを速やかに停止できる。
【0010】
(3)本発明のさらに他の局面に係るモータの駆動方法において、モータは、永久磁石を有するロータと、コイルが巻回されたステータとを含む。モータの駆動方法は、d-q回転座標系におけるd軸とd軸を推定したγ軸との間に角度差を設けることによってロータを加速してモータを始動するステップを含む。モータを始動するステップは、d軸電流が一定範囲から逸脱せず、かつ、ロータの角速度が単調に上昇し、かつ、角度差がゼロを含まない定められた範囲内に維持されるステップを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
マグネデザイン株式会社
ロータ
17日前
トヨタ自動車株式会社
予測方法
11日前
株式会社豊田自動織機
モータ冷却装置
17日前
日産自動車株式会社
発電機
23日前
株式会社セイワ
車両用配線カバー
2日前
株式会社ダイヘン
充電装置
19日前
住友電装株式会社
電気接続箱
12日前
ダイハツ工業株式会社
曲げ加工装置
13日前
トヨタ自動車株式会社
電池制御装置
6日前
住友電装株式会社
電気接続箱
24日前
住友電装株式会社
電気接続箱
24日前
住友電装株式会社
電気接続箱
12日前
トヨタ自動車株式会社
ステータ
24日前
富士電機株式会社
リニアモータ
2日前
株式会社ダイヘン
電圧調整装置
19日前
株式会社力電
配線スペース低減型の切替盤
16日前
トヨタ自動車株式会社
駆動ユニット
9日前
トヨタ自動車株式会社
電磁鋼板の成形方法
18日前
株式会社エフ・シー・シー
太陽光発電装置
2日前
株式会社デンソー
携帯機
17日前
ナブテスコ株式会社
駆動装置
6日前
トヨタ自動車株式会社
車両の制御装置
16日前
サンデン株式会社
電力変換装置
5日前
株式会社デンソー
電力変換装置
18日前
トヨタ自動車株式会社
ステータ
13日前
トヨタ自動車株式会社
車両の制御装置
2日前
愛知電機株式会社
固定子コア、固定子および電動機
20日前
矢崎総業株式会社
電線保護構造
19日前
トヨタ紡織株式会社
電機子の製造装置
20日前
株式会社明電舎
ドローン
19日前
神崎産業株式会社
漏電検出装置
3日前
株式会社アイシン
電力変換装置
11日前
株式会社デンソー
電力変換装置
18日前
株式会社富士通ゼネラル
モータ制御装置
3日前
株式会社アイシン
車両用駆動装置
12日前
矢崎総業株式会社
プロテクタ
5日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ