TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085882
公報種別
公開特許公報(A)
公開日
2025-06-06
出願番号
2023199566
出願日
2023-11-27
発明の名称
エンドエフェクタおよび果実の離脱方法
出願人
国立大学法人宇都宮大学
代理人
個人
,
個人
,
個人
,
個人
主分類
A01D
46/00 20060101AFI20250530BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
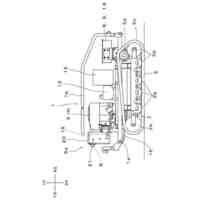
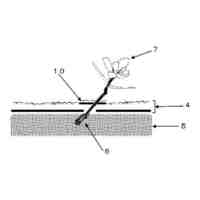
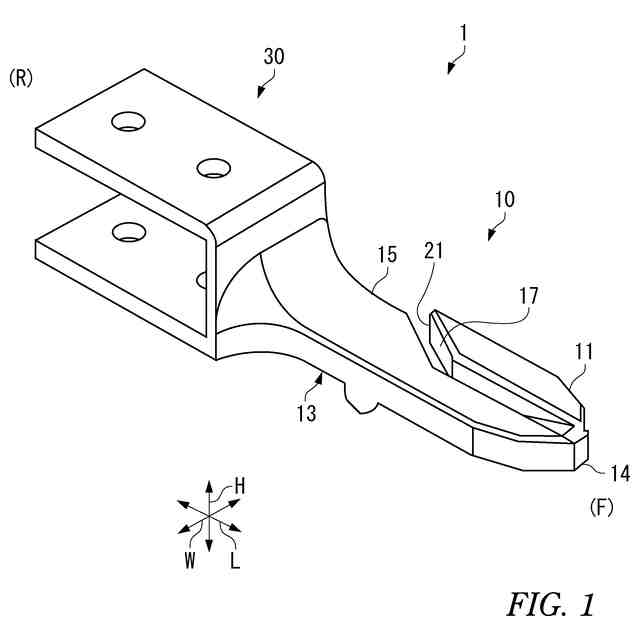
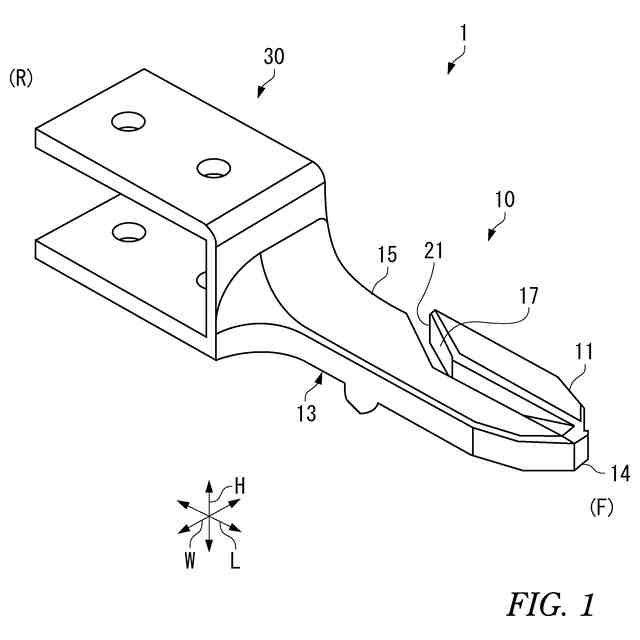
【課題】その移動動作だけで茎から果実を離脱できるエンドエフェクタを提供すること。
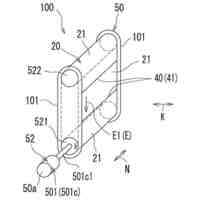
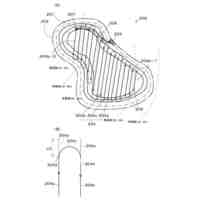
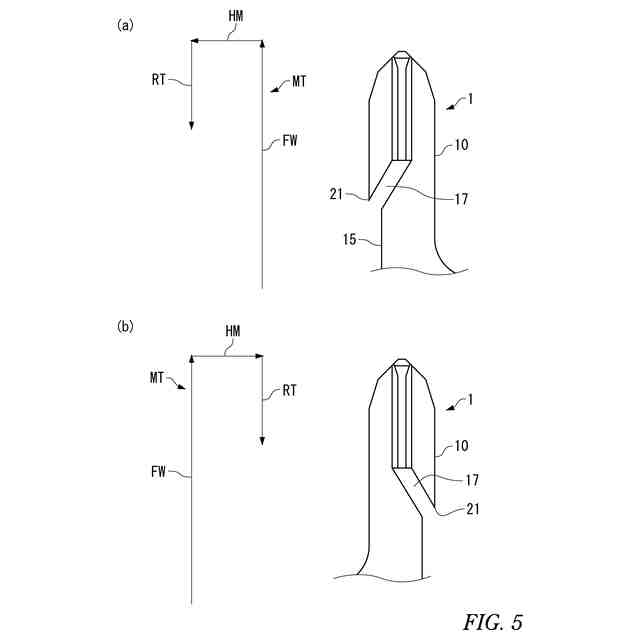
【解決手段】本発明のエンドエフェクタ1は、
果実(P)に繋がる茎(S)が摺動可能とされる案内面(15)と、
案内面(15)に連なり、案内されてきた茎(S)が始端(17A)から終端(17B)まで通る茎通路(17)と、
茎通路(17)の終端(17B)に設けられる係止爪(19)と、を備え、
案内面(15)に対して、茎通路(17)が傾いて形成される。
【選択図】図1
特許請求の範囲
【請求項1】
果実に繋がる茎が摺動可能とされる案内面と、
前記案内面に連なり、案内されてきた前記茎が始端から終端まで通る茎通路と、
前記茎通路の前記終端に設けられる係止爪と、を備え、
前記案内面に対して、前記茎通路が傾いて形成される、
エンドエフェクタ。
続きを表示(約 990 文字)
【請求項2】
前記茎通路の前記始端に臨んで誘い込み端が設けられ、
前記案内面を摺動しながら案内される前記茎は、前記誘い込み端に突き当たってから、前記始端から前記茎通路に進入する、
請求項1に記載のエンドエフェクタ。
【請求項3】
前記案内面は、平坦面から形成され、
前記茎通路は、前記始端から前記終端まで直線状に形成される、
請求項1に記載のエンドエフェクタ。
【請求項4】
ロボットの可動アームに装着される前記エンドエフェクタは、
前記可動アームに装着される側の後方と、前記後方の反対側の前方と、を有し、
前記前方は先細りに形成される、
請求項1に記載のエンドエフェクタ。
【請求項5】
前記エンドエフェクタは、金属板から構成され、
前記案内面は、前記金属板の側面から構成され、
前記茎通路は、前記金属板を打ち抜いて形成され、
前記係止爪は、前記前方から前記後方に向けて薄く形成される、
請求項4に記載のエンドエフェクタ。
【請求項6】
請求項1~請求項5のいずれか一項に記載のエンドエフェクタを用いて、前記茎から前記果実を離脱させる方法であって、
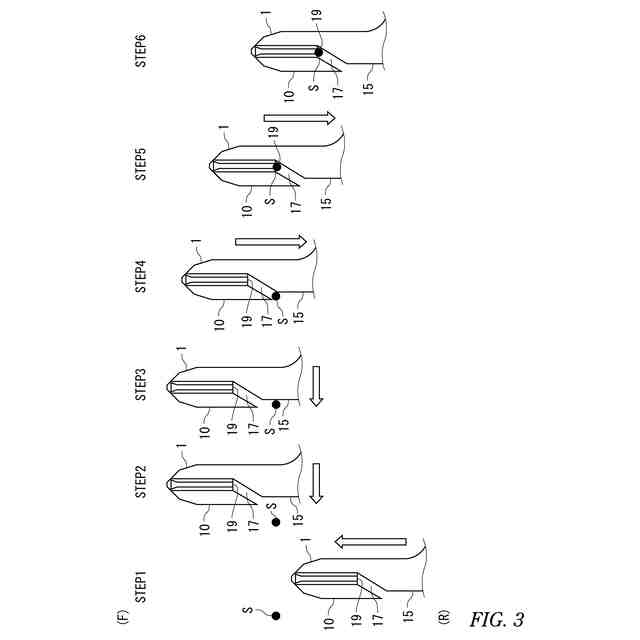
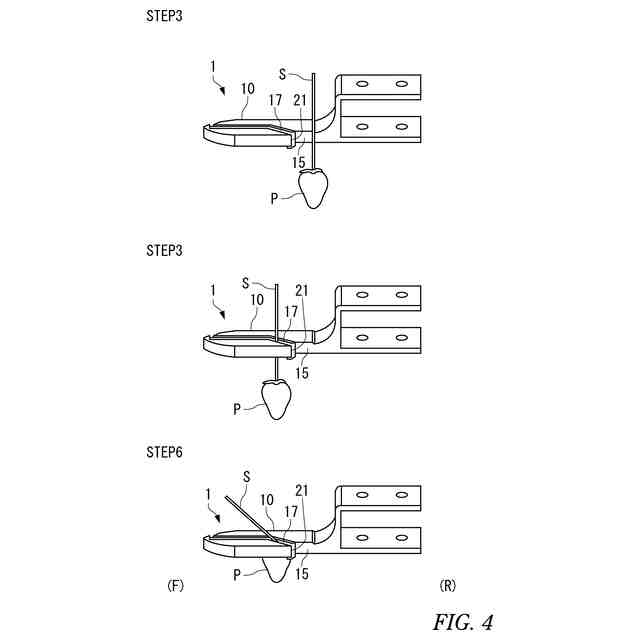
離脱の対象となる前記茎が前記案内面に対峙するように前記エンドエフェクタを第1方向に前進移動させる前進ステップと、
前記茎が前記案内面に接するように前記エンドエフェクタを、前記第1方向と交差する第2方向に移動させる横移動ステップと、
前記茎が前記案内面に接した状態を維持しながら、前記エンドエフェクタを、前記第1方向に後退移動させる後退移動ステップと、を備える、離脱方法。
【請求項7】
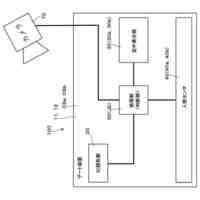
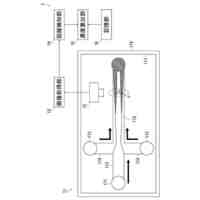
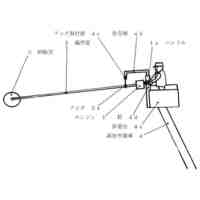
請求項1~請求項5のいずれか一項に記載のエンドエフェクタを備える収穫ロボットであって、
前記エンドエフェクタが装着され、三次元的な動作が可能とされる可動アームと、
前記可動アームを保持し、二次元的な移動が可能とされる移動台車と、を備える、収穫ロボット。
【請求項8】
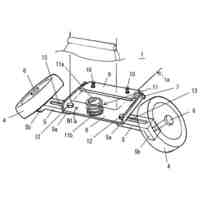
前記移動台車は、
前記エンドエフェクタで前記茎から離脱された前記果実を蓄えるストッカを備える、
請求項7に記載の収穫ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、果実を茎から離脱させる際に用いられるエンドエフェクタに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えばイチゴ、ミニトマト等の果実を茎から離脱させる際にエンドエフェクタ(End Effector)と称される機器が用いられている。このエンドエフェクタは、収穫用ロボットで果実を収穫する際に、ロボットのアームの先端に取り付けられ、茎を把持した後に切断することで、茎から果実を離脱させて、果実を収穫する。従来のエンドエフェクタは、例えば特許文献1に開示されるように、茎を切断する可動歯および固定歯を備え、この可動歯を固定歯に対して進退移動させるアクチュエータを備える。可動歯を備えるエンドエフェクタが装備される収穫用のロボットは、エンドエフェクタを動作させるアクチュエータに加えて、アームを駆動させるアクチュエータが必要となる。
【先行技術文献】
【特許文献】
【0003】
特開2008-011819号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば小粒のイチゴが密集した領域において、短時間で多くのイチゴを収穫することが求められることがある。このような収穫の場合、アームを動作させて収穫するイチゴに対してエンドエフェクタを位置合わせしてから茎を把持し、その後に可動歯を動作させることになるので、単位時間当たりの収穫量を多くするのに限界がある。
そこで本発明は、その移動動作だけで茎から果実を離脱できるエンドエフェクタを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明のエンドエフェクタは、
果実に繋がる茎が摺動可能とされる案内面と、
案内面に連なり、案内されてきた茎が始端から終端まで通る茎通路と、
茎通路の終端に設けられる係止爪と、を備え、
案内面に対して、茎通路が傾いて形成される。
【0006】
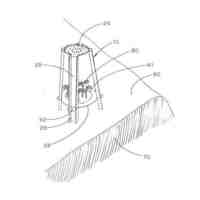
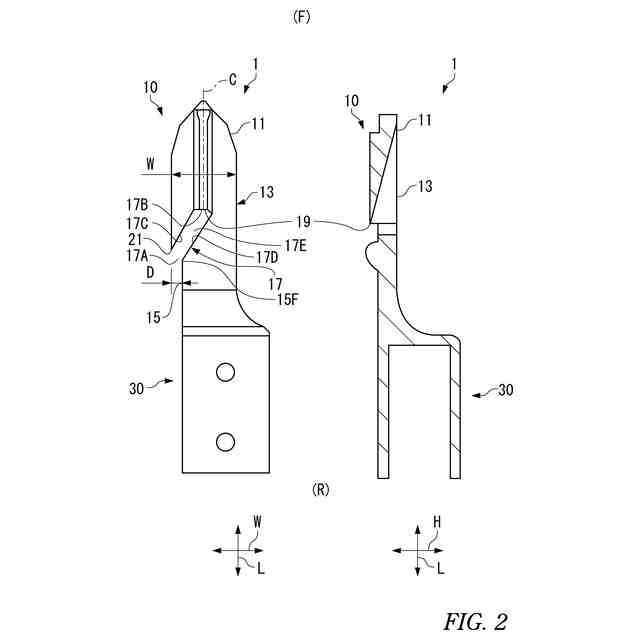
好ましいエンドエフェクタは、
茎通路の始端に臨んで誘い込み端が設けられ、
案内面を摺動しながら案内される茎は、誘い込み端に突き当たってから、始端から茎通路に進入する。
【0007】
好ましいエンドエフェクタは、
案内面は、平坦面から形成され、
茎通路は、始端から終端まで直線状に形成される。
【0008】
好ましいエンドエフェクタは、
ロボットの可動アームに装着されるエンドエフェクタは、
可動アームに装着される側の後方と、後の反対側の前方と、を有し、
前方は先細りに形成される。
【0009】
好ましいエンドエフェクタは、
金属板から構成され、
案内面は、金属板の側面から構成され、
茎通路は、金属板を打ち抜いて形成され、
係止爪は、前方から後方に向けて薄く形成される。
【0010】
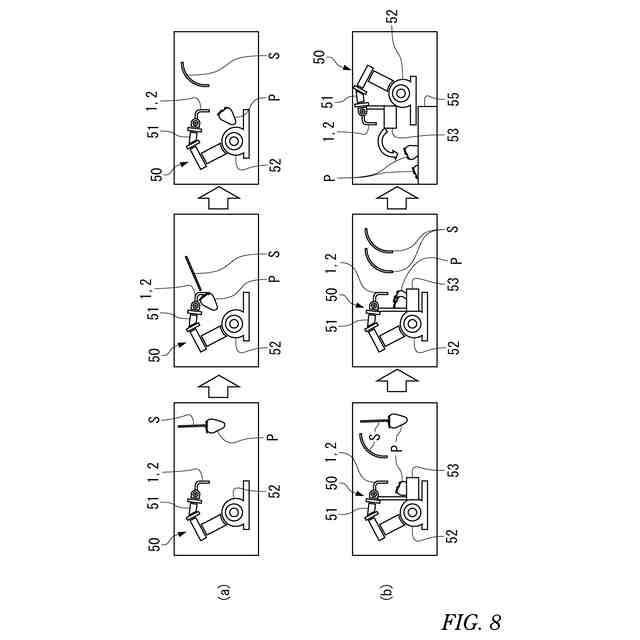
本発明は、以上のいずれかのエンドエフェクタを用いて、茎から果実を離脱させる方法を提供する。
本発明の離脱方法は、
離脱の対象となる茎が案内面に対峙するようにエンドエフェクタを第1方向に前進移動させる前進ステップと、
茎が案内面に接するようにエンドエフェクタを、第1方向と交差する第2方向に移動させる横移動ステップと、
茎が案内面に接した状態を維持しながら、エンドエフェクタを、第1方向に後退移動させる後退移動ステップと、を備える。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
国立大学法人宇都宮大学
ゲート装置
20日前
星和電機株式会社
表示装置
3か月前
星和電機株式会社
表示装置
3か月前
国立大学法人宇都宮大学
化学滴定方法、及び化学滴定システム
25日前
国立大学法人宇都宮大学
エンドエフェクタおよび果実の離脱方法
2日前
国立大学法人宇都宮大学
蛍光体、蛍光体を含む光源、および新規無機酸化物
2か月前
日本電信電話株式会社
表示装置、および表示方法
3か月前
学校法人 埼玉医科大学
イメージング装置、および光学素子
4か月前
国立大学法人宇都宮大学
空気中微生物濃度制御システム、及び空気中微生物濃度制御装置
1か月前
株式会社K-マテリアルズラボ
化合物、潜熱蓄熱材、潜熱蓄熱体、電子デバイス、及び蓄電デバイス
17日前
個人
枝切機
12日前
個人
苗キャップ
9日前
個人
飼槽
19日前
個人
園芸用自走車
13日前
個人
ペット用フード容器
18日前
井関農機株式会社
育苗培地
24日前
株式会社アテックス
草刈機
5日前
株式会社アピア
ルアー
17日前
個人
水耕栽培システム
6日前
個人
害虫捕獲装置
24日前
株式会社西部技研
空調システム
2日前
井関農機株式会社
収穫作業車両
23日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
16日前
株式会社LIXIL
検知装置
20日前
三菱マヒンドラ農機株式会社
移植機
23日前
個人
ペット用歯磨き用具セット
11日前
ダイハツ工業株式会社
草刈り機
9日前
株式会社丹勝
TK防草植込式緑化工法
24日前
合同会社小林知財研鑽処
液体空気散布船
6日前
関東農機株式会社
ロータリ管理機
5日前
株式会社シマノ
釣竿及び着脱部材
24日前
井関農機株式会社
作業車両
24日前
日工株式会社
除草具
9日前
株式会社クボタ
田植機
13日前
株式会社ササキコーポレーション
農作業機
24日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ