TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090992
公報種別
公開特許公報(A)
公開日
2025-06-18
出願番号
2023205926
出願日
2023-12-06
発明の名称
情報処理装置、情報処理方法およびプログラム
出願人
沖電気工業株式会社
代理人
個人
,
個人
,
個人
主分類
G01C
21/26 20060101AFI20250611BHJP(測定;試験)
要約
【課題】経路に基づく処理の精度を向上させることが可能な技術を提供する。
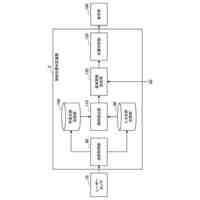
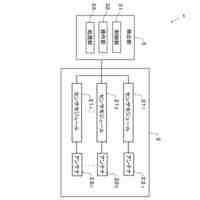
【解決手段】経路情報に対する複数の候補回転角それぞれによる回転後の経路情報に対する近似式を候補近似式として算出し、前記候補近似式と前記回転後の経路情報とに基づいて、所定の処理に用いられる決定回転角と決定近似式とを算出する算出部と、前記決定回転角と前記決定近似式とに基づいて、前記所定の処理を行う処理部と、を備える、情報処理装置が提供される。
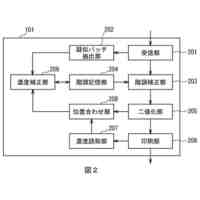
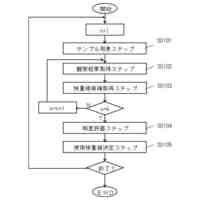
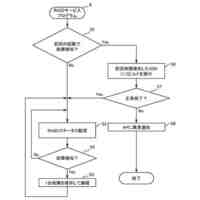
【選択図】図2
特許請求の範囲
【請求項1】
経路情報に対する複数の候補回転角それぞれによる回転後の経路情報に対する近似式を候補近似式として算出し、前記候補近似式と前記回転後の経路情報とに基づいて、所定の処理に用いられる決定回転角と決定近似式とを算出する算出部と、
前記決定回転角と前記決定近似式とに基づいて、前記所定の処理を行う処理部と、
を備える、情報処理装置。
続きを表示(約 1,700 文字)
【請求項2】
前記情報処理装置は、
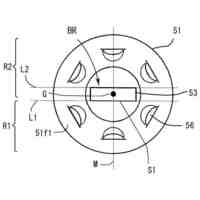
センサによって得られた点群に基づいて物体を検出する物体検出部を備え、
前記処理部は、前記物体の検出結果に基づく物体位置と前記決定回転角と前記決定近似式とに基づいて、前記所定の処理を行う、
請求項1に記載の情報処理装置。
【請求項3】
前記所定の処理は、前記決定回転角による回転後の物体位置と前記決定回転角による回転後の基準位置と前記決定近似式とに基づいて、前記物体位置から前記基準位置までに前記物体が移動する予測距離を算出する処理を含む、
請求項2に記載の情報処理装置。
【請求項4】
前記所定の処理は、前記予測距離と前記物体の移動速度とに基づいて、前記物体による前記予測距離の移動に要する時間を到達予測時間として算出する処理を含む、
請求項3に記載の情報処理装置。
【請求項5】
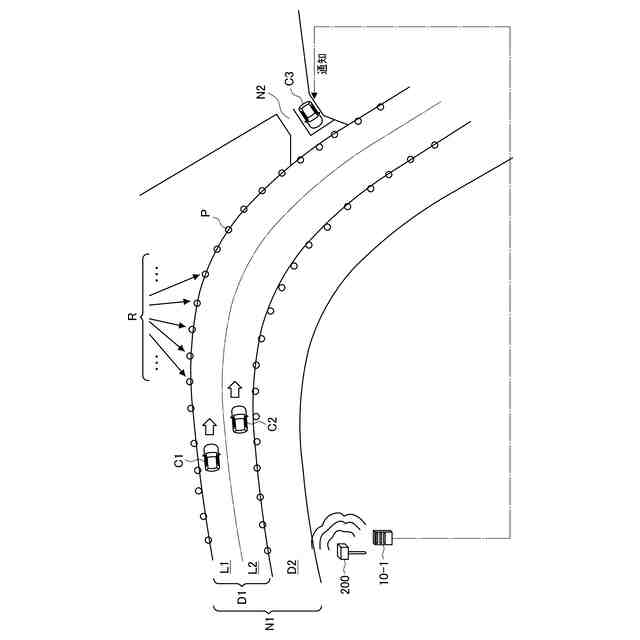
前記経路情報は、複数の経路情報を含み、
前記算出部は、前記複数の経路情報それぞれの前記決定回転角と前記決定近似式とを算出し、
前記処理部は、前記複数の経路情報それぞれの前記決定回転角による回転後の物体位置と前記決定近似式とに基づいて、前記所定の処理を行う、
請求項2に記載の情報処理装置。
【請求項6】
前記複数の経路情報それぞれは、前記物体が存在し得るレーンに対応しており、
前記所定の処理は、前記複数の経路情報それぞれの前記決定回転角による回転後の物体位置と前記決定近似式とに基づいて、前記物体が存在するレーンを判定する処理を含む、
請求項5に記載の情報処理装置。
【請求項7】
前記所定の処理は、
前記物体が存在すると判定されたレーンにおける基準位置を取得する処理と、
前記物体が存在すると判定されたレーンの、前記決定回転角による回転後の物体位置と前記決定回転角による回転後の基準位置と前記決定近似式とに基づいて、前記物体位置から前記基準位置までに前記物体が移動する予測距離を算出する処理と、を含む、
請求項6に記載の情報処理装置。
【請求項8】
前記所定の処理は、前記複数の経路情報それぞれの前記決定回転角による回転後の点群と前記決定近似式とに基づいて、物体検出に用いられる点群を特定する処理を含み、
前記情報処理装置は、
前記点群に基づいて物体を検出する物体検出部を備える、
請求項1に記載の情報処理装置。
【請求項9】
前記複数の経路情報は、第1の経路情報と第2の経路情報とを含み、
同一の点に対する、前記第1の経路情報の前記決定回転角による回転後の第2の座標が、前記第2の経路情報の前記決定回転角による回転後の第2の座標より小さく、
前記所定の処理は、
前記第1の経路情報の前記決定回転角による回転後の第2の座標が、
前記第1の経路情報の前記決定回転角による回転後の第1の座標と前記第1の経路情報の前記決定近似式とに基づく第1の近似値または前記第1の近似値から第1のマージン幅を減算した値以上であるという条件、かつ、
前記第2の経路情報の前記決定回転角による回転後の第2の座標が、
前記第2の経路情報の前記決定回転角による回転後の第1の座標と前記第2の経路情報の前記決定近似式とに基づく第2の近似値または前記第2の近似値に第2のマージン幅を加算した値以下であるという条件を満たす点群を、
前記物体検出に用いられる点群として特定する処理を含む、
請求項8に記載の情報処理装置。
【請求項10】
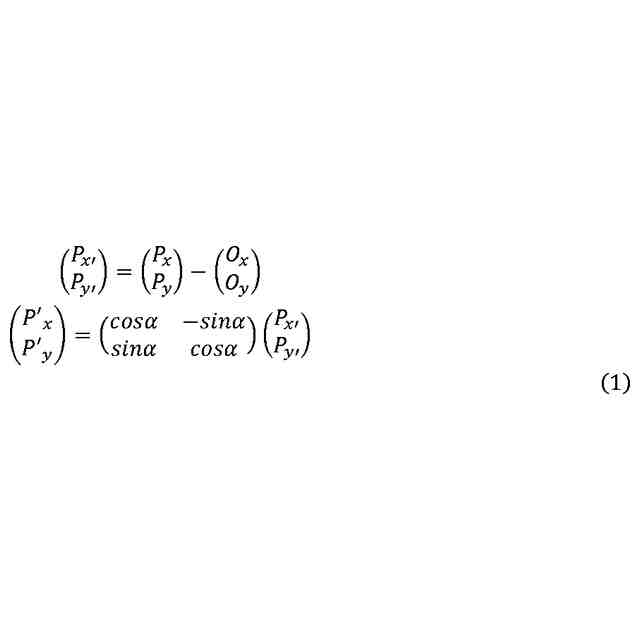
前記算出部は、前記回転後の経路情報の第1の座標と前記候補近似式とに基づく近似値を候補回転角ごとに算出し、前記近似値と前記回転後の経路情報の第2の座標との誤差が最も小さくなる場合における、候補回転角および候補近似式を前記決定回転角および前記決定近似式として算出する、
請求項1~9のいずれか一項に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法およびプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
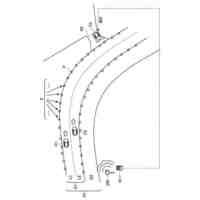
近年、物体の経路に基づく処理を実行する技術が知られている。かかる技術においては、経路を直線に近似した近似経路を算出し、近似経路に基づく処理を実行することが考えられる。しかし、経路は直線であるとは限らない。例えば、経路が曲線である場合もあれば、経路が直線と曲線との組み合わせである場合もある。そこで、特許文献1には、経路を直線部と円弧部とクロソイド曲線部といった複数の部分に分解し、当該複数の部分に対して部分ごとに異なる近似方法により近似を行って近似経路を算出し、近似経路に基づく処理を実行する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第5749359号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、経路を分解して得られる複数の部分に対して部分ごとに異なる近似方法により近似を行うだけでは、近似の精度が向上しない可能性がある。また、近似の精度が向上しなければ、近似経路に基づく処理の精度も向上しない可能性がある。
【0005】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、経路に基づく処理の精度を向上させることが可能な技術を提供することにある。
【課題を解決するための手段】
【0006】
上記問題を解決するために、本発明のある観点によれば、経路情報に対する複数の候補回転角それぞれによる回転後の経路情報に対する近似式を候補近似式として算出し、前記候補近似式と前記回転後の経路情報とに基づいて、所定の処理に用いられる決定回転角と決定近似式とを算出する算出部と、前記決定回転角と前記決定近似式とに基づいて、前記所定の処理を行う処理部と、を備える、情報処理装置が提供される。
【0007】
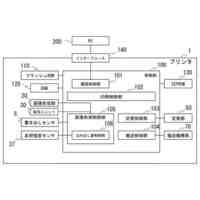
前記情報処理装置は、センサによって得られた点群に基づいて物体を検出する物体検出部を備え、前記処理部は、前記物体の検出結果に基づく物体位置と前記決定回転角と前記決定近似式とに基づいて、前記所定の処理を行ってもよい。
【0008】
前記所定の処理は、前記決定回転角による回転後の物体位置と前記決定回転角による回転後の基準位置と前記決定近似式とに基づいて、前記物体位置から前記基準位置までに前記物体が移動する予測距離を算出する処理を含んでもよい。
【0009】
前記所定の処理は、前記予測距離と前記物体の移動速度とに基づいて、前記物体による前記予測距離の移動に要する時間を到達予測時間として算出する処理を含んでもよい。
【0010】
前記経路情報は、複数の経路情報を含み、前記算出部は、前記複数の経路情報それぞれの前記決定回転角と前記決定近似式とを算出し、前記処理部は、前記複数の経路情報それぞれの前記決定回転角による回転後の物体位置と前記決定近似式とに基づいて、前記所定の処理を行ってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
沖電気工業株式会社
画像形成装置
20日前
沖電気工業株式会社
画像形成装置
4日前
沖電気工業株式会社
画像形成装置
11日前
沖電気工業株式会社
画像形成装置及び画像形成方法
3日前
沖電気工業株式会社
画像形成装置及び階調補正方法
19日前
沖電気工業株式会社
電源制御装置及び画像形成装置
13日前
沖電気工業株式会社
画像形成装置及び画像形成方法
5日前
沖電気工業株式会社
ユニット引出装置及び媒体処理装置
3日前
沖電気工業株式会社
情報処理装置、情報処理方法およびプログラム
12日前
沖電気工業株式会社
情報処理装置、情報処理方法およびプログラム
3日前
沖電気工業株式会社
情報処理装置、情報処理方法およびプログラム
4日前
沖電気工業株式会社
通信装置設定方法、通信装置及び通信装置設定システム
13日前
沖電気工業株式会社
印刷管理プログラム、印刷管理方法、及び情報処理装置
19日前
沖電気工業株式会社
情報処理装置、ファームウェア更新システム及びプログラム
20日前
沖電気工業株式会社
情報処理サーバ、情報処理方法、プログラム、及び情報処理システム
4日前
沖電気工業株式会社
プログラム、RAIDドライバプログラム、制御装置、電子機器および自動取引装置
27日前
沖電気工業株式会社
半導体複合装置の製造方法及び複合集積フィルムの製造方法
19日前
日本精機株式会社
表示装置
13日前
株式会社エビス
水準器
1か月前
株式会社チノー
測定装置
20日前
有限会社原製作所
検出回路
11日前
日本無線株式会社
レーダ装置
12日前
個人
浸透探傷試験方法
1か月前
株式会社不二越
塵埃噴射装置
1か月前
日本碍子株式会社
ガスセンサ
1か月前
株式会社リコー
光学機器
11日前
トヨタ自動車株式会社
制御装置
1か月前
株式会社東芝
センサ
1か月前
個人
フロートレス液面センサー
4日前
大和製衡株式会社
組合せ計量装置
13日前
日本特殊陶業株式会社
ガスセンサ
3日前
株式会社チノー
検量線の取得方法
20日前
日本精機株式会社
二酸化炭素濃度測定器
18日前
日本特殊陶業株式会社
ガスセンサ
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
キヤノン株式会社
放射線撮像装置
6日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ