TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025091158
公報種別
公開特許公報(A)
公開日
2025-06-18
出願番号
2023206242
出願日
2023-12-06
発明の名称
モニタリング装置、検査装置、モニタリング方法、及びプログラム
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01B
11/00 20060101AFI20250611BHJP(測定;試験)
要約
【課題】回転機械の無開放点検時に回転体の基準位相に対する位相ずれ量を推定することができるモニタリング装置を提供する。
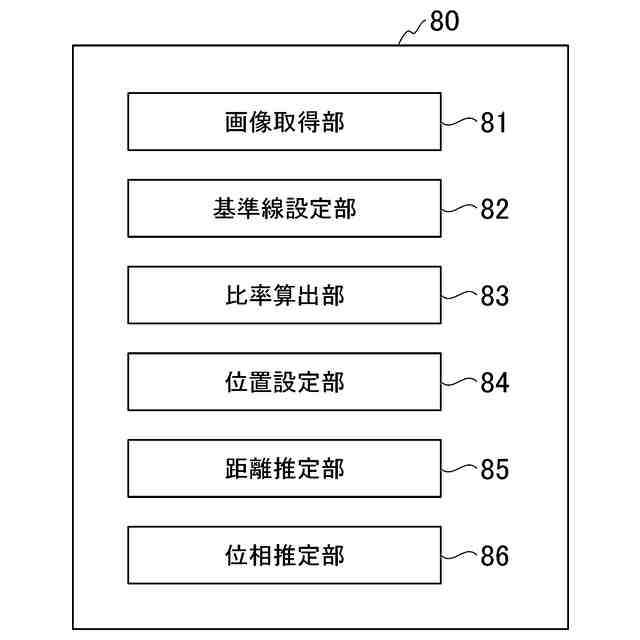
【解決手段】モニタリング装置は、回転機械の静止体と回転体とを含む画像を取得する画像取得部と、前記画像上で指定された前記回転機械の所定部位の両端位置と前記所定部位の実寸法とに基づいて前記実寸法に対する前記所定部位の前記画像上の大きさの比率を算出する比率算出部と、前記静止体の周方向位置を示す第1位置、及び前記回転体の周方向位置を示す第2位置を設定する位置設定部と、前記第1位置及び前記第2位置の前記画像上の周方向距離と、算出した前記比率とに基づいて、前記第1位置及び前記第2位置の地上座標系における周方向実距離を推定する距離推定部と、推定した前記周方向実距離に基づいて、前記回転体の基準位相に対する位相ずれ量を推定する位相推定部と、を備える。
【選択図】図12
特許請求の範囲
【請求項1】
検査用チューブの先端に設けられたセンサから、回転機械の静止体と、前記静止体に対して相対回転する回転体と、を含む画像を取得する画像取得部と、
前記画像上で指定された前記回転機械の所定部位の両端位置と、前記回転機械の設計情報に含まれる前記所定部位の実寸法とに基づいて、前記実寸法に対する前記所定部位の前記画像上の大きさの比率を算出する比率算出部と、
前記画像上で指定された前記静止体及び前記回転体それぞれの特徴点に基づいて、前記静止体の周方向位置を示す第1位置、及び前記回転体の周方向位置を示す第2位置を設定する位置設定部と、
前記第1位置及び前記第2位置の前記画像上の周方向距離と、算出した前記比率とに基づいて、前記第1位置及び前記第2位置の地上座標系における周方向実距離を推定する距離推定部と、
推定した前記周方向実距離に基づいて、前記回転体の基準位相に対する位相ずれ量を推定する位相推定部と、
を備えるモニタリング装置。
続きを表示(約 2,100 文字)
【請求項2】
前記画像上で指定された、前記地上座標系における前記回転機械の周方向に延びる線分、及び前記地上座標系における前記線分に直交する垂直線それぞれの両端位置に基づいて、前記周方向に延びる線分に対応する前記画像上の第1基準線、及び、前記垂直線に対応する前記画像上の第2基準線を設定する基準線設定部をさらに備え、
前記位相推定部は、前記第1位置を通り前記第2基準線に平行な第1仮想線と前記第1基準線との第1交点から、前記第2位置を通り前記第2基準線に平行な第2仮想線と前記第1基準線との第2交点までの距離を、前記画像上の前記第1位置及び前記第2位置の周方向距離とする、
請求項1に記載のモニタリング装置。
【請求項3】
前記所定部位は前記回転体に設けられており、
前記位置設定部は、前記所定部位の一端側の位置を前記第2位置として設定する、
請求項1に記載のモニタリング装置。
【請求項4】
前記画像上の複数の特徴点の指定を受け付ける特徴点設定部と、
複数の前記特徴点の前記画像上の位置と、前記回転機械の設計情報に含まれる特徴点の地上座標系における位置情報とに基づいて、前記センサの地上座標系における位置を推定する位置姿勢推定部と、
をさらに備える請求項1に記載のモニタリング装置。
【請求項5】
前記位置姿勢推定部は、推定した前記センサの位置及び姿勢と、前記センサの目標位置及び目標姿勢との誤差をさらに推定する、
請求項4に記載のモニタリング装置。
【請求項6】
検査用チューブの先端に設けられたセンサから、回転機械の静止体と、前記静止体に対して相対回転する回転体と、を含む画像を取得する画像取得部と、
前記画像上の複数の特徴点の指定を受け付ける特徴点設定部と、
複数の前記特徴点の前記画像上の位置と、前記回転機械の設計情報に含まれる特徴点の地上座標系における位置情報とに基づいて、前記センサの地上座標系における位置及び姿勢を推定する位置姿勢推定部と、
を備えるモニタリング装置。
【請求項7】
先端にセンサが設けられた検査用チューブと、
請求項1から6のいずれか一項に記載のモニタリング装置と、
を備える検査装置。
【請求項8】
検査用チューブの先端に設けられたセンサから、回転機械の静止体と、前記静止体に対して相対回転する回転体と、を含む画像を取得するステップと、
前記画像上で指定された前記回転機械の所定部位の両端位置と、前記回転機械の設計情報に含まれる前記所定部位の実寸法とに基づいて、前記実寸法に対する前記所定部位の前記画像上の大きさの比率を算出するステップと、
前記画像上で指定された前記静止体及び前記回転体それぞれの特徴点に基づいて、前記静止体の周方向位置を示す第1位置、及び前記回転体の周方向位置を示す第2位置を設定するステップと、
前記第1位置及び前記第2位置の前記画像上の周方向距離と、算出した前記比率とに基づいて、前記第1位置及び前記第2位置の地上座標系における周方向実距離を推定するステップと、
推定した前記周方向実距離に基づいて、前記回転体の基準位相に対する位相ずれ量を推定するステップと、
を有するモニタリング方法。
【請求項9】
検査用チューブの先端に設けられたセンサから、回転機械の静止体と、前記静止体に対して相対回転する回転体と、を含む画像を取得するステップと、
前記画像上の複数の特徴点の指定を受け付けるステップと、
複数の前記特徴点の前記画像上の位置と、前記回転機械の設計情報に含まれる特徴点の地上座標系における位置情報とに基づいて、前記センサの地上座標系における位置及び姿勢を推定するステップと、
を有するモニタリング方法。
【請求項10】
検査用チューブの先端に設けられたセンサから、回転機械の静止体と、前記静止体に対して相対回転する回転体と、を含む画像を取得するステップと、
前記画像上で指定された前記回転機械の所定部位の両端位置と、前記回転機械の設計情報に含まれる前記所定部位の実寸法とに基づいて、前記実寸法に対する前記所定部位の前記画像上の大きさの比率を算出するステップと、
前記画像上で指定された前記静止体及び前記回転体それぞれの特徴点に基づいて、前記静止体の周方向位置を示す第1位置、及び前記回転体の周方向位置を示す第2位置を設定するステップと、
前記第1位置及び前記第2位置の前記画像上の周方向距離と、算出した前記比率とに基づいて、前記第1位置及び前記第2位置の地上座標系における周方向実距離を推定するステップと、
推定した前記周方向実距離に基づいて、前記回転体の基準位相に対する位相ずれ量を推定するステップと、
をモニタリング装置に実行させるプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、モニタリング装置、検査装置、モニタリング方法、及びプログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
近年では、カメラなどのセンサで対象物を監視、検査する装置が利用されている。たとえば、特許文献1には、自動運転トラックの荷台の接続や分離作業の自動化を目的として、カメラ画像情報を利用して荷台分離治具の位置を検出するシステムが記載されている。特許文献2には、物体の形状認識を目的として、スリットパターン光源を利用して、撮影した物体の3次元表面形状を計測する技術が記載されている。
【0003】
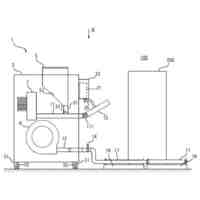
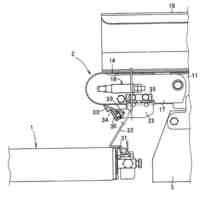
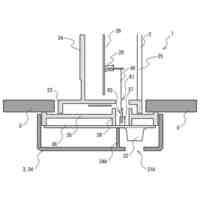
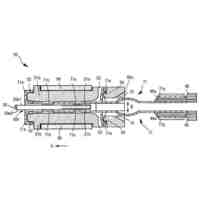
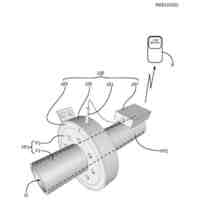
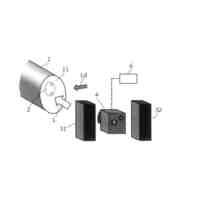
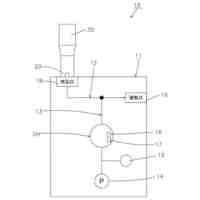
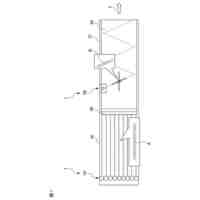
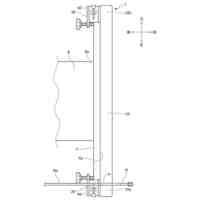
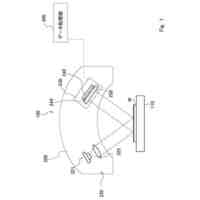
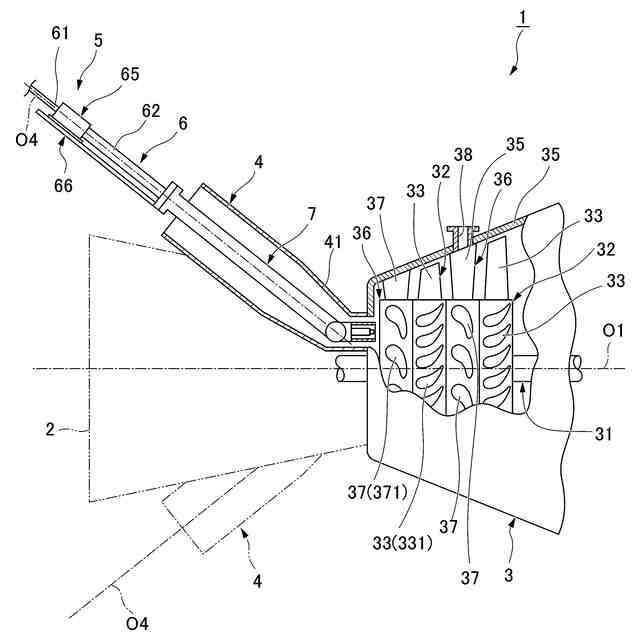
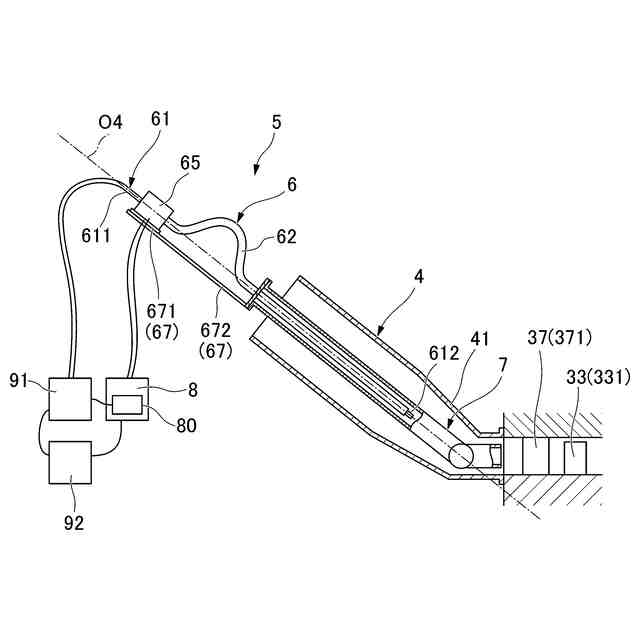
また、蒸気タービンやガスタービンなどの回転機械では、ケーシングを取り外さずに内部を点検する無開放点検が行われる。回転機械の内部は、複数の翼(静翼、動翼)が配置された複雑かつ狭隘な内部形状を有している。このような狭隘部を通って検査するための検査装置として、特許文献3には、先端にセンサが設けられた検査用ケーブルが内蔵され、可撓性を有するチューブ、チューブの姿勢を調節可能な姿勢用アクチュエータ、チューブを進退させる進退用アクチュエータを備えるチューブ状の検査装置が記載されている。
【先行技術文献】
【特許文献】
【0004】
国際公開第2022/051329号
特許第6752468号公報
特許第7059396号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
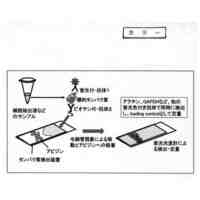
無開放点検時に回転機械を傷つけることなく狭隘部を通過するためには、検査装置の信頼性をより高めることが求められる。例えば、検査装置の信頼性を向上するためには、検査装置が狭隘部で干渉(接触)しない目標経路を生成する必要がある。例えば特許文献3のような従来の検査装置では、動翼が所定の位相(基準位相)で運転停止したと想定して、目標経路を生成している。しかしながら、動翼は必ずしも所定の位相で運転停止するとは限らず、また、動翼が実際にどの位相で運転停止したかを回転機械の外部から検出することはできない。したがって、動翼が基準位相と異なる位相で運転停止した場合に、検査装置が干渉しない目標経路を生成することが困難となる可能性がある。
【0006】
また、回転機械の内部のような狭隘空間では、位置検出に用いられる特徴量が少ない場合がある。そうすると、例えば特許文献1のような従来のシステムでは、カメラ画像情報から対象物の位置を特定するシステムでは、十分な特徴量を得られず対象物の位置(動翼の位相)を正しく検出することが困難となる可能性がある。さらに、特許文献2のような位置推定用のスリットパターンを搭載するシステムは、回転機械などの高温環境下で使用することが困難である。つまり、従来の技術では回転機械の狭隘空間という環境下において動翼の位相を検出することは困難である。
【0007】
本開示の目的は、回転機械の無開放点検時に回転体の基準位相に対する位相ずれ量を推定することができるモニタリング装置、検査装置、モニタリング方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0008】
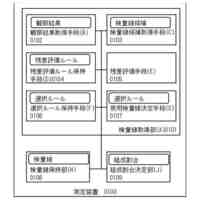
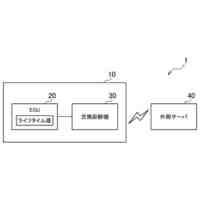
本開示の一態様によれば、モニタリング装置は、検査用チューブの先端に設けられたセンサから、回転機械の静止体と、前記静止体に対して相対回転する回転体と、を含む画像を取得する画像取得部と、前記画像上で指定された前記回転機械の所定部位の両端位置と、前記回転機械の設計情報に含まれる前記所定部位の実寸法とに基づいて、前記実寸法に対する前記所定部位の前記画像上の大きさの比率を算出する比率算出部と、前記画像上で指定された前記静止体及び前記回転体それぞれの特徴点に基づいて、前記静止体の周方向位置を示す第1位置、及び前記回転体の周方向位置を示す第2位置を設定する位置設定部と、前記第1位置及び前記第2位置の前記画像上の周方向距離と、算出した前記比率とに基づいて、前記第1位置及び前記第2位置の地上座標系における周方向実距離を推定する距離推定部と、推定した前記周方向実距離に基づいて、前記回転体の基準位相に対する位相ずれ量を推定する位相推定部と、を備える。
【0009】
本開示の一態様によれば、モニタリング装置は、検査用チューブの先端に設けられたセンサから、回転機械の静止体と、前記静止体に対して相対回転する回転体と、を含む画像を取得する画像取得部と、前記画像上の複数の特徴点の指定を受け付ける特徴点設定部と、複数の前記特徴点の前記画像上の位置と、前記回転機械の設計情報に含まれる特徴点の地上座標系における位置情報とに基づいて、前記センサの地上座標系における位置及び姿勢を推定する位置姿勢推定部と、を備える。
【0010】
本開示の一態様によれば、モニタリング方法は、検査用チューブの先端に設けられたセンサから、回転機械の静止体と、前記静止体に対して相対回転する回転体と、を含む画像を取得するステップと、前記画像上で指定された前記回転機械の所定部位の両端位置と、前記回転機械の設計情報に含まれる前記所定部位の実寸法とに基づいて、前記実寸法に対する前記所定部位の前記画像上の大きさの比率を算出するステップと、前記画像上で指定された前記静止体及び前記回転体それぞれの特徴点に基づいて、前記静止体の周方向位置を示す第1位置、及び前記回転体の周方向位置を示す第2位置を設定するステップと、前記第1位置及び前記第2位置の前記画像上の周方向距離と、算出した前記比率とに基づいて、前記第1位置及び前記第2位置の地上座標系における周方向実距離を推定するステップと、推定した前記周方向実距離に基づいて、前記回転体の基準位相に対する位相ずれ量を推定するステップと、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
表示装置
13日前
株式会社チノー
測定装置
20日前
有限会社原製作所
検出回路
11日前
日本無線株式会社
レーダ装置
12日前
株式会社不二越
塵埃噴射装置
1か月前
個人
浸透探傷試験方法
1か月前
株式会社リコー
光学機器
11日前
トヨタ自動車株式会社
制御装置
1か月前
株式会社東芝
センサ
1か月前
個人
フロートレス液面センサー
4日前
大和製衡株式会社
組合せ計量装置
13日前
日本特殊陶業株式会社
ガスセンサ
1か月前
株式会社チノー
検量線の取得方法
20日前
キヤノン株式会社
放射線撮像装置
6日前
日本特殊陶業株式会社
ガスセンサ
1か月前
日本精機株式会社
二酸化炭素濃度測定器
18日前
日本特殊陶業株式会社
ガスセンサ
3日前
TDK株式会社
アレイセンサ
1か月前
学校法人 中央大学
管内径推定装置
24日前
大同特殊鋼株式会社
座標系較正方法
6日前
個人
多段電磁加速による高力積衝撃試験機
26日前
旭光電機株式会社
漏出検出装置
3日前
大同特殊鋼株式会社
ラベル色特定方法
6日前
東洋紡株式会社
ヘムタンパク質の安定化方法
27日前
キヤノン株式会社
光学装置
17日前
住友化学株式会社
積層基板
3日前
スズキ株式会社
ECU交換診断システム
17日前
NISSHA株式会社
ガス検出器
16日前
株式会社村田製作所
厚み測定装置
20日前
本田技研工業株式会社
車載検出器
20日前
株式会社アステックス
ラック型負荷装置
4日前
個人
簡易・迅速タンパク質検出装置および方法
1か月前
大和ハウス工業株式会社
計測用治具
3日前
株式会社ミツトヨ
非接触表面性状評価装置
5日前
トヨタ自動車株式会社
異音判定装置
5日前
株式会社 システムスクエア
検査選別装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ