TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025093438
公報種別
公開特許公報(A)
公開日
2025-06-24
出願番号
2023209073
出願日
2023-12-12
発明の名称
塗布方法およびプログラム
出願人
東洋製罐株式会社
代理人
弁理士法人RYUKA国際特許事務所
主分類
B64U
10/13 20230101AFI20250617BHJP(航空機;飛行;宇宙工学)
要約
【課題】無人航空機を用いた液状物の塗布方法を提供する。
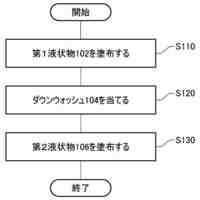
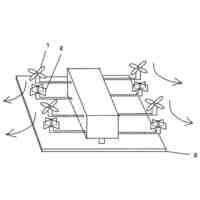
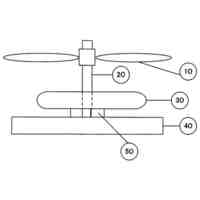
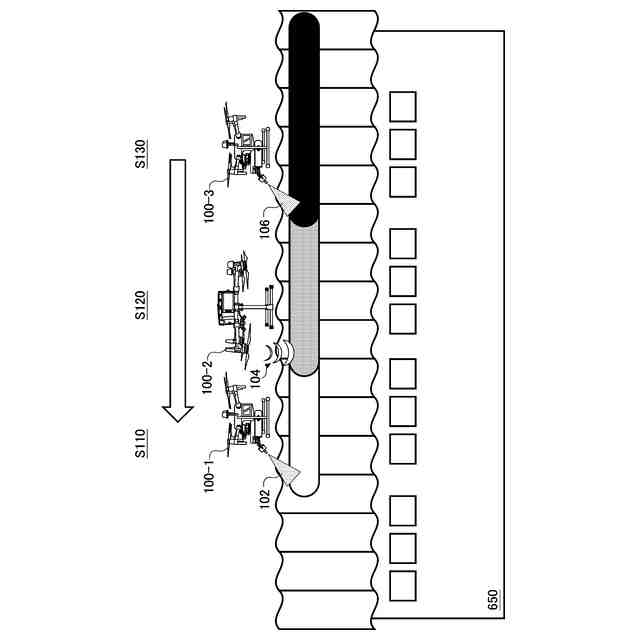
【解決手段】第1無人航空機から予め定められた第1液状物を塗布対象に塗布する段階と、塗布した前記第1液状物よりも高い位置から、回転翼を有する第2無人航空機のダウンウォッシュを前記第1液状物に当てて、前記第1液状物の変化を促進させる段階と、変化させた前記第1液状物に、第3無人航空機から予め定められた第2液状物を塗布する段階と、を備える塗布方法を提供する。コンピュータにより実行されると、前記コンピュータが、第1無人航空機に、予め定められた第1液状物を塗布対象に塗布させ、回転翼を有する第2無人航空機に、塗布した前記第1液状物よりも高い位置から、前記第2無人航空機のダウンウォッシュを前記第1液状物に当てて、前記第1液状物の変化を促進させ、第3無人航空機に、変化させた前記第1液状物に予め定められた第2液状物を塗布させる、プログラムを提供する。
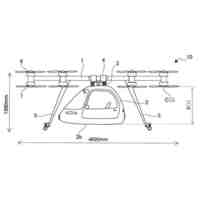
【選択図】図2
特許請求の範囲
【請求項1】
無人航空機を用いた液状物の塗布方法であって、
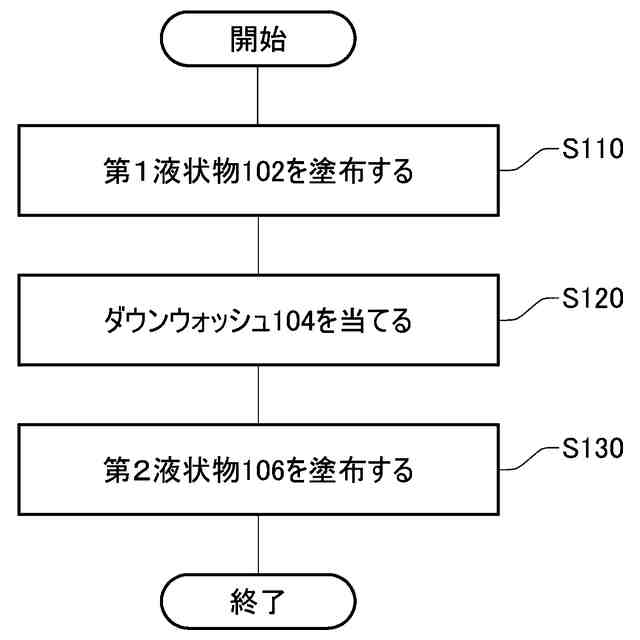
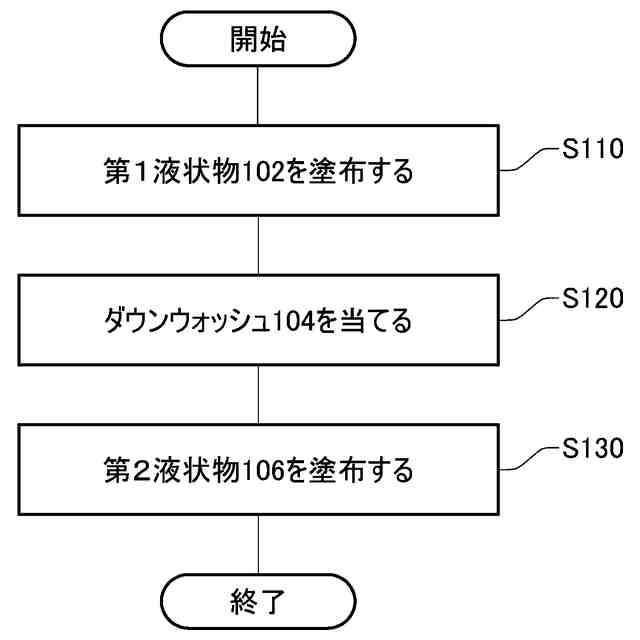
第1無人航空機から予め定められた第1液状物を塗布対象に塗布する段階と、
塗布した前記第1液状物よりも高い位置から、回転翼を有する第2無人航空機のダウンウォッシュを前記第1液状物に当てて、前記第1液状物の変化を促進させる段階と、
変化させた前記第1液状物に、第3無人航空機から予め定められた第2液状物を塗布する段階と、
を備える塗布方法。
続きを表示(約 830 文字)
【請求項2】
前記第1無人航空機、前記第2無人航空機または前記第3無人航空機の少なくとも2つは、同一の無人航空機である
請求項1に記載の塗布方法。
【請求項3】
前記第1無人航空機、前記第2無人航空機および前記第3無人航空機は、同一の無人航空機である
請求項1に記載の塗布方法。
【請求項4】
前記第2液状物は、前記第1液状物と同一の液状物である
請求項1に記載の塗布方法。
【請求項5】
前記第2無人航空機が有する検知部を用いて、前記第1液状物の変化を検知する段階を備える
請求項1から4のいずれか一項に記載の塗布方法。
【請求項6】
前記検知部によって検知した前記第1液状物の変化状態に応じて、前記第2無人航空機を移動させる段階を備える
請求項5に記載の塗布方法。
【請求項7】
前記第1液状物の変化を検知する段階は、前記第2無人航空機が前記検知部として有する熱赤外線カメラを用いて、前記第1液状物の変化を検知する段階を含む
請求項5に記載の塗布方法。
【請求項8】
前記第1液状物の変化を検知する段階は、前記第2無人航空機が前記検知部として有する可視光カメラを用いて、前記第1液状物の変化を検知する段階を含む
請求項5に記載の塗布方法。
【請求項9】
前記第2無人航空機が前記検知部によって検知した前記第1液状物の変化状態に応じて、前記第2液状物の塗布量を算出する段階を備える
請求項5に記載の塗布方法。
【請求項10】
前記第2無人航空機が有する許可情報取得部から、前記第1液状物の変化状態に応じて前記第2液状物の塗布を許可する許可情報を出力する段階を備える
請求項1から4のいずれか一項に記載の塗布方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、塗布方法およびプログラムに関する。
続きを表示(約 950 文字)
【背景技術】
【0002】
特許文献1には、「無人航空機を用いて上空から液体を散布して抗菌・抗ウイルス処理を行う方法」が記載されている。
[先行技術文献]
[特許文献]
特許文献1 特開2022-89775号公報
特許文献2 特許第6611213号公報
【0003】
第1液状物の変化を促進して第2液状物を塗り重ねる塗布方法を提供する。
【発明の概要】
【0004】
本発明の第1の態様においては、無人航空機を用いた液状物の塗布方法であって、第1無人航空機から予め定められた第1液状物を塗布対象に塗布する段階と、塗布した前記第1液状物よりも高い位置から、回転翼を有する第2無人航空機のダウンウォッシュを前記第1液状物に当てて、前記第1液状物の変化を促進させる段階と、変化させた前記第1液状物に、第3無人航空機から予め定められた第2液状物を塗布する段階と、を備える塗布方法を提供する。
【0005】
上記塗布方法において、前記第1無人航空機、前記第2無人航空機または前記第3無人航空機の少なくとも2つは、同一の無人航空機であってよい。
【0006】
上記いずれかの塗布方法において、前記第1無人航空機、前記第2無人航空機および前記第3無人航空機は、同一の無人航空機であってよい。
【0007】
上記いずれかの塗布方法において、前記第2液状物は、前記第1液状物と同一の液状物であってよい。
【0008】
上記いずれかの塗布方法は、前記第2無人航空機が有する検知部を用いて、前記第1液状物の変化を検知する段階を備えてよい。
【0009】
上記いずれかの塗布方法は、前記検知部によって検知した前記第1液状物の変化状態に応じて、前記第2無人航空機を移動させる段階を備えてよい。
【0010】
上記いずれかの塗布方法において、前記第1液状物の変化を検知する段階は、前記第2無人航空機が前記検知部として有する熱赤外線カメラを用いて、前記第1液状物の変化を検知する段階を含んでよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東洋製罐株式会社
リサイクルシステム
1か月前
東洋製罐株式会社
リサイクルシステム
1か月前
東洋製罐株式会社
塗布方法およびプログラム
1か月前
東洋製罐株式会社
金属容器及び金属容器の製造方法
2か月前
東洋製罐株式会社
成形条件調整方法、及び、成形条件調整装置
1か月前
東洋製罐グループホールディングス株式会社
ポリエステル樹脂、成形体、プリフォーム、ポリエステルボトル、及びメカニカルリサイクルポリエステル樹脂
1か月前
東洋製罐グループホールディングス株式会社
ポリエステル樹脂、成形体、プリフォーム、ポリエステルボトル、及びメカニカルリサイクルポリエステル樹脂
1か月前
東洋製罐グループホールディングス株式会社
ポリエステル樹脂、成形体、プリフォーム、ポリエステルボトル、及びメカニカルリサイクルポリエステル樹脂
1か月前
東洋製罐グループホールディングス株式会社
ポリエステル樹脂、成形体、プリフォーム、ポリエステルボトル、及びメカニカルリサイクルポリエステル樹脂
1か月前
東洋製罐グループホールディングス株式会社
ポリエステル樹脂、成形体、プリフォーム、ポリエステルボトル、及びメカニカルリサイクルポリエステル樹脂
1か月前
東洋製罐グループホールディングス株式会社
ポリエステル樹脂、成形体、プリフォーム、ポリエステルボトル、及びメカニカルリサイクルポリエステル樹脂
1か月前
個人
ドローン
4か月前
個人
人工台風
3日前
個人
着火ドローン
1か月前
個人
救難消防飛行艇
2か月前
個人
ドローンシステム
6か月前
東レ株式会社
中空回転翼
1か月前
個人
連続回転可能な飛行機翼
2か月前
株式会社三圓
浮上装置
10か月前
個人
陸海空用の乗り物
3か月前
個人
空飛ぶクルマ
29日前
東レ株式会社
プロペラブレード
1か月前
東レ株式会社
プロペラブレード
1か月前
個人
ドローンの計測操作方法3
10か月前
東レ株式会社
プロペラブレード
1か月前
個人
垂直離着陸機用エンジン改
5か月前
個人
ドローンの計測操作方法2
10か月前
キヤノン電子株式会社
磁気トルカ
11か月前
個人
空中移動システム
7か月前
個人
ドローン消音装置
8か月前
個人
ドローンを自動離着陸する方法
6か月前
トヨタ自動車株式会社
ドローン
4か月前
個人
エアライナー全自動パラシュート
4か月前
合同会社アドエア
パラシュート射出装置
4か月前
個人
ヘリコプター駆動装置
1か月前
合同会社アドエア
飛行体の落下補助装置
7か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ