TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025095028
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023210779
出願日
2023-12-14
発明の名称
遠隔操作システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G08G
1/09 20060101AFI20250619BHJP(信号)
要約
【課題】モビリティの遠隔操作の精度を確保すること。
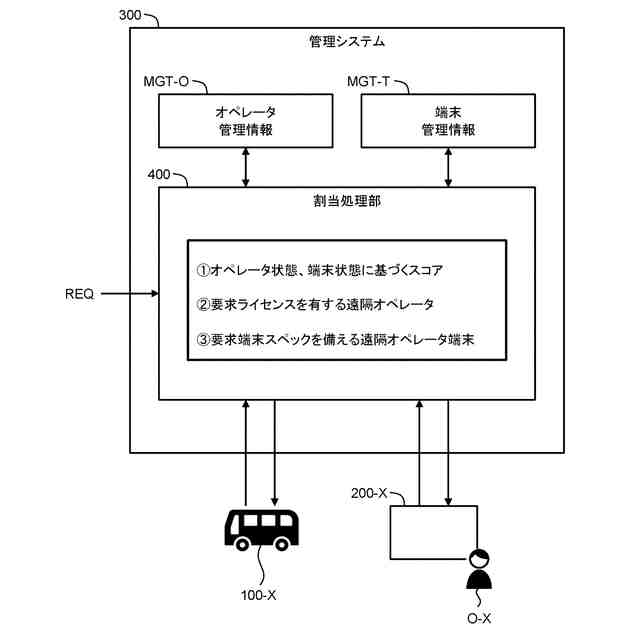
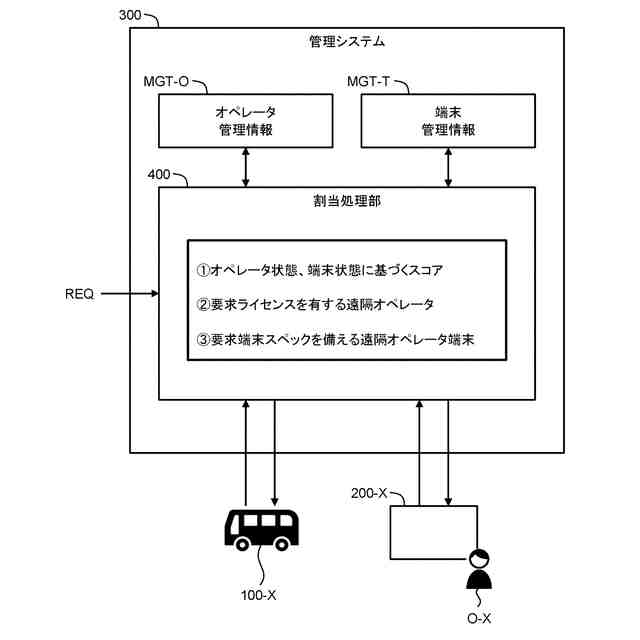
【解決手段】モビリティの遠隔操作のための遠隔操作システムが提供される。外部オペレータは、遠隔操作を管理する遠隔操作管理センターの外の遠隔オペレータである。外部オペレータ端末は、遠隔操作のために外部オペレータによって使用される。遠隔操作システムは、外部オペレータの状態と外部オペレータ端末の状態の少なくとも一方を示す状態情報に基づいて、遠隔操作に対する外部オペレータと外部オペレータ端末の少なくとも一方の適合性を示すスコアを算出する。そして、遠隔操作システムは、スコアに基づいて、対象モビリティの遠隔操作に割り当てる第1外部オペレータと第1外部オペレータ端末の少なくとも一方を選択する。
【選択図】図2
特許請求の範囲
【請求項1】
モビリティの遠隔操作のための遠隔操作システムであって、
外部オペレータは、前記モビリティの遠隔操作を管理する遠隔操作管理センターの外の遠隔オペレータであり、
外部オペレータ端末は、前記遠隔操作のために前記外部オペレータによって使用されるように構成された遠隔オペレータ端末であり、
前記遠隔操作システムは、1又は複数のプロセッサを備え、
前記1又は複数のプロセッサは、
前記外部オペレータの状態と前記外部オペレータ端末の状態の少なくとも一方を示す状態情報を取得し、
前記状態情報に基づいて、前記遠隔操作に対する前記外部オペレータと前記外部オペレータ端末の少なくとも一方の適合性を示すスコアを算出し、
前記スコアに基づいて、対象モビリティの前記遠隔操作に割り当てる第1外部オペレータと第1外部オペレータ端末の少なくとも一方を選択する
ように構成された
遠隔操作システム。
続きを表示(約 890 文字)
【請求項2】
請求項1に記載の遠隔操作システムであって、
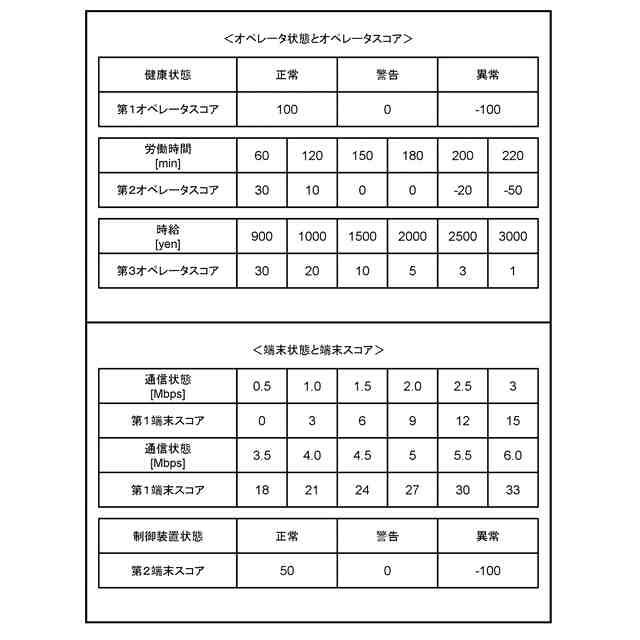
前記外部オペレータの前記状態は、前記外部オペレータの健康状態と、過去の一定期間内において前記外部オペレータが前記遠隔操作に従事した労働時間と、前記外部オペレータの時給とのうち少なくとも1つを含む
遠隔操作システム。
【請求項3】
請求項1に記載の遠隔操作システムであって、
前記外部オペレータ端末の前記状態は、前記外部オペレータ端末の通信状態と、前記外部オペレータ端末の制御装置の異常度とのうち少なくとも1つを含む
遠隔操作システム。
【請求項4】
請求項1乃至3のいずれか一項に記載の遠隔操作システムであって、
前記モビリティの種類は複数であり、
前記1又は複数のプロセッサは、更に、
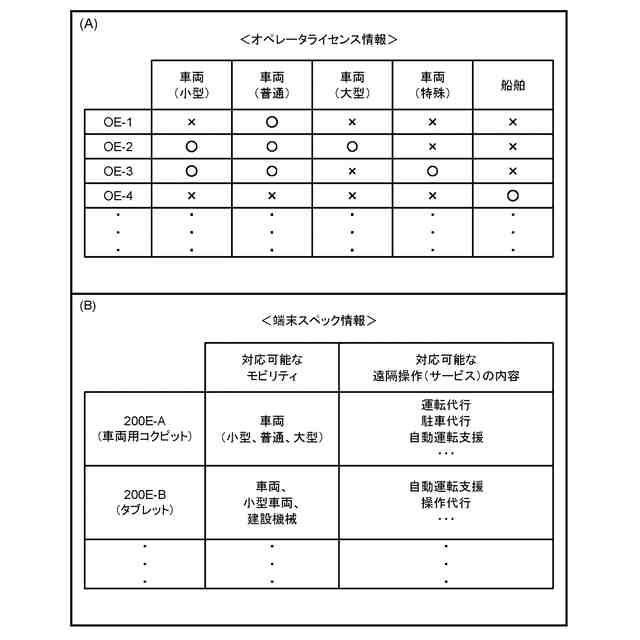
前記複数種類のモビリティの操作に関して複数の外部オペレータの各々が有するライセンスを示すオペレータライセンス情報を取得し、
前記対象モビリティの前記遠隔操作に要求される要求ライセンスを示す要求能力情報を取得し、
前記オペレータライセンス情報と前記要求ライセンスに基づいて、前記要求ライセンスを有する前記第1外部オペレータを選択する
ように構成された
遠隔操作システム。
【請求項5】
請求項1乃至3のいずれか一項に記載の遠隔操作システムであって、
内部オペレータは、前記遠隔操作管理センターの中の遠隔オペレータであり、
内部オペレータ端末は、前記遠隔操作のために前記内部オペレータによって使用されるように構成された遠隔オペレータ端末であり、
所定の条件は、利用可能な内部オペレータあるいは利用可能な内部オペレータ端末の数あるいは割合が閾値以下となることを含み、
前記1又は複数のプロセッサは、前記所定の条件が成立した場合に、前記第1外部オペレータと前記第1外部オペレータ端末を前記対象モビリティの前記遠隔操作に割り当てる
遠隔操作システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モビリティの遠隔操作に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1は、車両遠隔操作支援システムを開示している。オペレータが不足している場合、車両遠隔操作支援システムは、管制センタから離れた外部センタ内の外部オペレータに遠隔操作支援を要求する。
【先行技術文献】
【特許文献】
【0003】
特開2020-42764号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
遠隔操作管理センターの外の外部オペレータがモビリティの遠隔操作を行うことについて考える。外部オペレータに関しては、遠隔操作に適切な状態とそうでない状態が有り得る。同様に、外部オペレータが遠隔操作のために使用する外部オペレータ端末に関しても、遠隔操作に適切な状態とそうでない状態が有り得る。仮に遠隔操作に不適切な状態の外部オペレータあるいは外部オペレータ端末が選択されると、遠隔操作の精度が低下する。
【課題を解決するための手段】
【0005】
本開示の1つの観点は、モビリティの遠隔操作のための遠隔操作システムに関する。
外部オペレータは、モビリティの遠隔操作を管理する遠隔操作管理センターの外の遠隔オペレータである。外部オペレータ端末は、遠隔操作のために外部オペレータによって使用されるように構成された遠隔オペレータ端末である。
遠隔操作システムは、1又は複数のプロセッサを備える。1又は複数のプロセッサは、外部オペレータの状態と外部オペレータ端末の状態の少なくとも一方を示す状態情報を取得する。1又は複数のプロセッサは、状態情報に基づいて、遠隔操作に対する外部オペレータと外部オペレータ端末の少なくとも一方の適合性を示すスコアを算出する。1又は複数のプロセッサは、スコアに基づいて、対象モビリティの遠隔操作に割り当てる第1外部オペレータと第1外部オペレータ端末の少なくとも一方を選択する。
【発明の効果】
【0006】
本開示によれば、モビリティの遠隔操作の精度が確保される。
【図面の簡単な説明】
【0007】
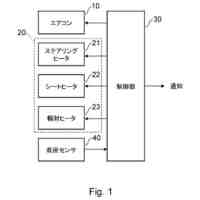
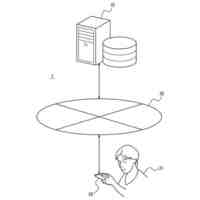
遠隔操作システムの概要を説明するための概念図である。
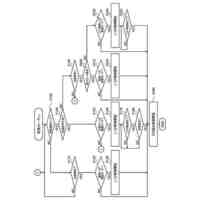
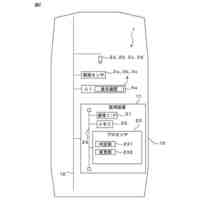
管理システムによる割当処理の概要を説明するための概念図である。
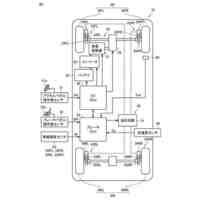
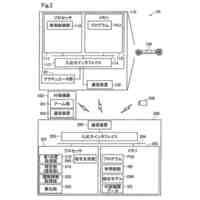
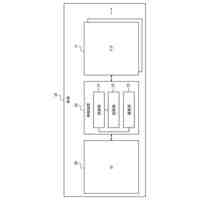
遠隔操作システムの構成例を示す概念図である。
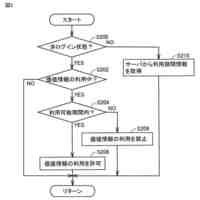
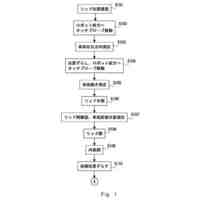
管理システムによる割当処理を示すフローチャートである。
第1の観点におけるスコアの例を説明するための概念図である。
第2の観点及び第3の観点を説明するための概念図である。
【発明を実施するための形態】
【0008】
1.遠隔サポートシステム
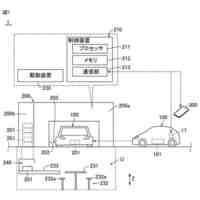
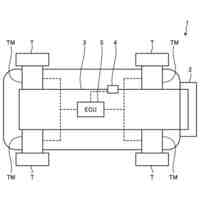
図1は、本実施の形態に係る遠隔操作システム1の概要を説明するための概念図である。遠隔操作システム1は、モビリティ100の遠隔操作のためのシステムである。遠隔操作は遠隔運転を含む概念である。遠隔操作システム1は、モビリティ100、遠隔オペレータ端末200、及び管理システム300を含んでいる。モビリティ100、遠隔オペレータ端末200、及び管理システム300は、通信ネットワークを介して互いに通信可能である。例えば、モビリティ100は、遠隔オペレータ端末200や管理システム300と無線通信ネットワークを介して無線通信可能である。遠隔オペレータ端末200と管理システム300は、有線/無線通信ネットワークを介して互いに通信可能である。
【0009】
1-1.モビリティ
モビリティ100は、移動可能な移動体である。モビリティ100は、モビリティ100に搭乗したオペレータによって手動で操作されてもよい。モビリティ100は、自律移動機能を備えていてもよい。いずれの場合であっても、モビリティ100は、必要に応じて遠隔でも操作され得るように構成される。すなわち、モビリティ100が、遠隔操作システム1による遠隔操作の対象である。
【0010】
遠隔操作の対象となるモビリティ100の種類は、1つに限られず、複数であってもよい。例えば、モビリティ100は、公道を走行する車両である。他の例として、モビリティ100は、工場内で使用される車両であってもよい。更に他の例として、モビリティ100は、特殊な小型車両であってもよい。更に他の例として、モビリティ100は、建設機械であってもよい。更に他の例として、モビリティ100は、ロボットであってもよい。更に他の例として、モビリティ100は、飛翔体であってもよい。更に他の例として、モビリティ100は、船舶であってもよい。更に他の例として、モビリティ100は、遊園地内の乗り物であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
端末
17日前
トヨタ自動車株式会社
電極
1日前
トヨタ自動車株式会社
電池
11日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
装置
1日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
組電池
16日前
トヨタ自動車株式会社
自動車
8日前
トヨタ自動車株式会社
モータ
10日前
トヨタ自動車株式会社
組電池
17日前
トヨタ自動車株式会社
電動車
17日前
トヨタ自動車株式会社
軸部材
9日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
駆動装置
10日前
トヨタ自動車株式会社
電動車両
10日前
トヨタ自動車株式会社
判定装置
3日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
蓄電セル
4日前
トヨタ自動車株式会社
挿入治具
10日前
トヨタ自動車株式会社
ホッパー
4日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
電池セル
1日前
トヨタ自動車株式会社
充電装置
3日前
トヨタ自動車株式会社
蓄電セル
10日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
冷却装置
16日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ