TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025095266
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211164
出願日
2023-12-14
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/09 20060101AFI20250619BHJP(信号)
要約
【課題】中止条件が成立した場合に利用者の状況に応じて適切な通知を行うことにより、利用者がその通知を気付かない可能性を低減し、且つ、利用者がその通知を煩わしく感じる可能性を低減できる車両制御装置を提供する。
【解決手段】車両制御装置は、車外にいる利用者が操作する遠隔操作装置が送信した指示に基いて、目標スペースに向かって車両を自動で走行させる自動走行制御を実行する。車両制御装置は、自動走行制御の実行中に所定の中止条件が成立した場合、車両を停車させるとともに、遠隔操作装置に第1通知を行わせ、第1通知の後に利用者が車両に接近しない場合、第1通知と異なる態様の第2通知を遠隔操作装置に行わせるように構成されている。
【選択図】 図5
特許請求の範囲
【請求項1】
車外にいる利用者が操作する遠隔操作装置が送信した指示に基いて、目標スペースに向かって車両を自動で走行させる自動走行制御を実行する車両制御装置において、
前記車両制御装置は、
前記自動走行制御の実行中に所定の中止条件が成立した場合、前記車両を停車させるとともに、前記遠隔操作装置に第1通知を行わせ、
前記第1通知の後に前記利用者が前記車両に接近しない場合、前記第1通知と異なる態様の第2通知を前記遠隔操作装置に行わせる、
ように構成された、車両制御装置。
続きを表示(約 450 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記車両制御装置は、前記第1通知よりも前記利用者の注意を惹く態様で前記第2通知を前記遠隔操作装置に行わせるように構成された、
車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
前記車両制御装置は、前記第1通知の後に前記車両に接近する物標が存在する場合、前記第2通知よりも優先して、前記第1通知及び前記第2通知と異なる態様の第3通知を前記遠隔操作装置に行わせるように構成された、
車両制御装置。
【請求項4】
請求項3に記載の車両制御装置において、
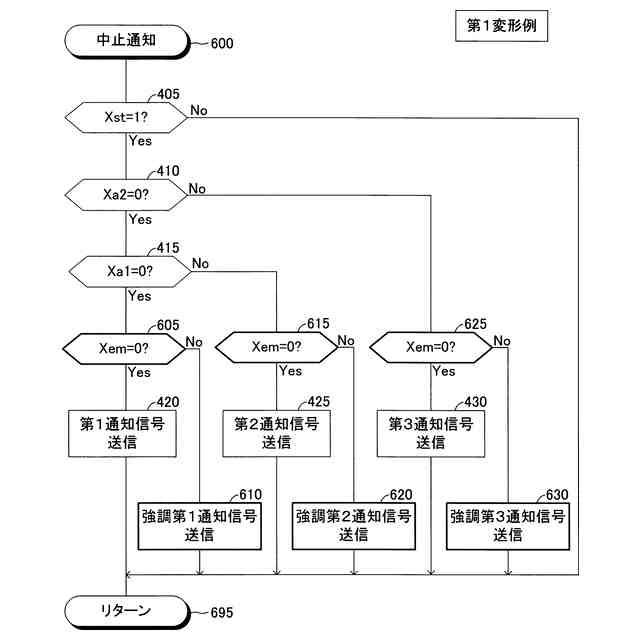
前記車両制御装置は、前記第1通知の後所定時間が経過しても前記利用者が前記車両に搭乗しないとの非搭乗条件が成立した場合、前記非搭乗条件が成立しない場合よりも、前記遠隔操作装置が行う前記第1通知乃至前記第3通知を、前記利用者の注意をより惹く態様で行わせるように構成された、
車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車外にいる利用者が遠隔操作装置を操作して目標スペースに向かって車両を自動で走行させる自動走行制御を実行する車両制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来から、自動運転の一種である自動走行制御を実行する車両制御装置が知られている。例えば、特許文献1に記載の車両制御装置(以下、「従来装置」と称呼する。)は、リモート駐車制御を自動走行制御として実行する。リモート駐車制御は、車外にいる利用者が操作する遠隔操作装置から送信される駐車指令に応じて、車両を目標スペースまで移動させ駐車させる制御である。
【先行技術文献】
【特許文献】
【0003】
特開2023-114501号公報
【発明の概要】
【0004】
このように車外にいる利用者が遠隔操作装置を操作して車両を目標スペースまで移動させる自動走行制御においては、所定の中止条件が成立した場合には、車両は停車する。例えば、中止条件は自動走行制御で走行した走行距離が閾値以上となった場合に成立する。中止条件が成立して車両が停車した場合には、利用者は車両に搭乗する必要がある。
【0005】
中止条件が成立した場合、遠隔操作装置はその旨を利用者に通知することが検討されている。しかし、この通知を、利用者の状況に応じずに一律に行うと、車両に接近していない利用者はその通知に気付かない可能性があり、車両に接近している利用者はその通知を煩わしく感じる可能性がある。
【0006】
本発明は前述した課題に対処するためになされたものである。即ち、本発明の目的の一つは、中止条件が成立した場合に利用者の状況に応じて適切な通知を行うことにより、利用者がその通知を気付かない可能性を低減し、且つ、利用者がその通知を煩わしく感じる可能性を低減できる車両制御装置を提供することにある。
【0007】
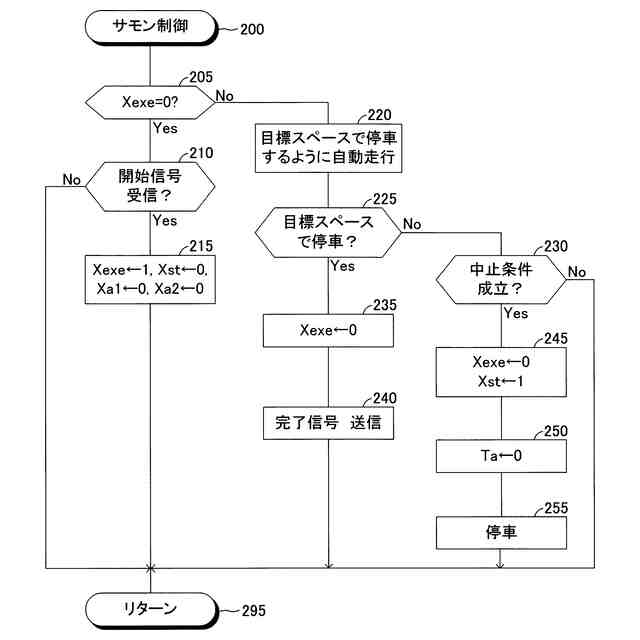
本発明の車両制御装置(以下、「本発明装置」と称呼する。)は、車外にいる利用者が操作する遠隔操作装置が送信した指示に基いて、目標スペースに向かって車両を自動で走行させる自動走行制御を実行する(ステップ200乃至ステップ295)。
前記車両制御装置は、
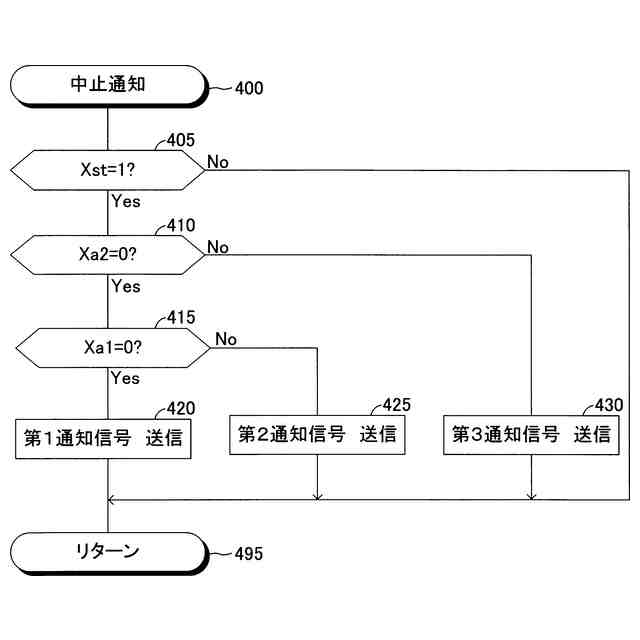
前記自動走行制御の実行中に所定の中止条件が成立した場合(ステップ230「Yes」)、前記車両を停車させるとともに(ステップ255)、前記遠隔操作装置に第1通知を行わせ(ステップ415「Yes」、ステップ420)、
前記第1通知の後に前記利用者が前記車両に接近しない場合(ステップ315「No」、ステップ345)、前記第1通知と異なる態様の第2通知を前記遠隔操作装置に行わせる(ステップ415「No」、ステップ425)、
ように構成されている。
【0008】
本発明装置によれば、第1通知の後に利用者が車両に接近しない場合、第1通知と異なる態様の第2通知が行われるので、車両に接近しない利用者が通知に気付かない可能性を低減できる。なお、利用者が車両に接近している場合には第2通知が行われないので、車両に接近している利用者が通知を煩わしく感じる可能性を低減できる。
【図面の簡単な説明】
【0009】
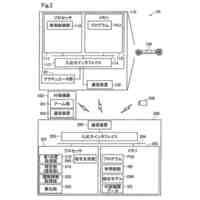
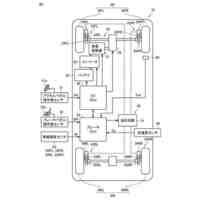
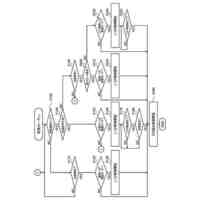
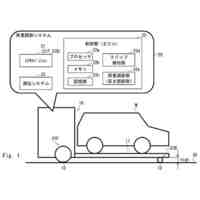
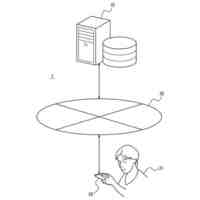
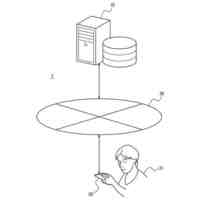
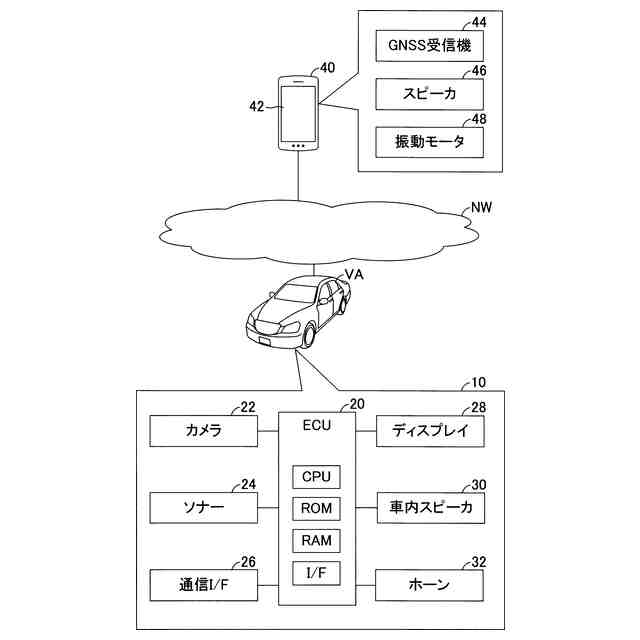
本発明の実施形態に係る車両制御システムの概略システム構成図である。
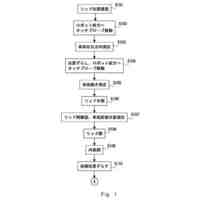
図1に示したECUのCPUが実行するサモン制御ルーチンのフローチャートである。
図1に示したECUのCPUが実行するフラグ設定ルーチンのフローチャートである。
図1に示したECUのCPUが実行する中止通知ルーチンのフローチャートである。
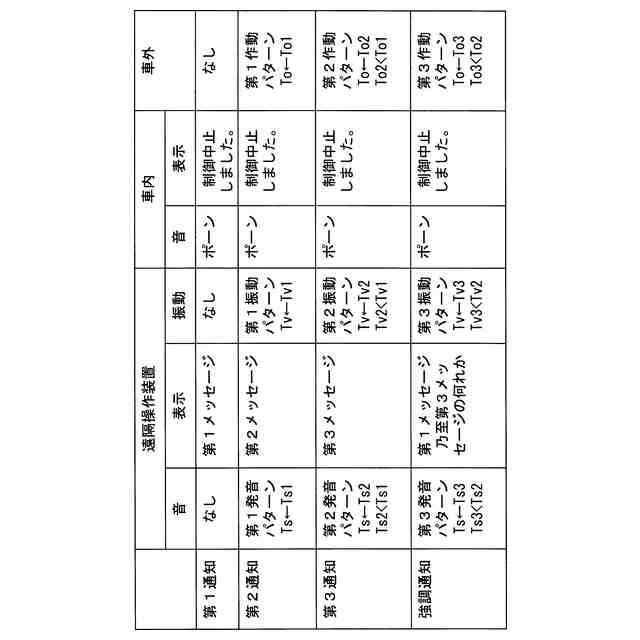
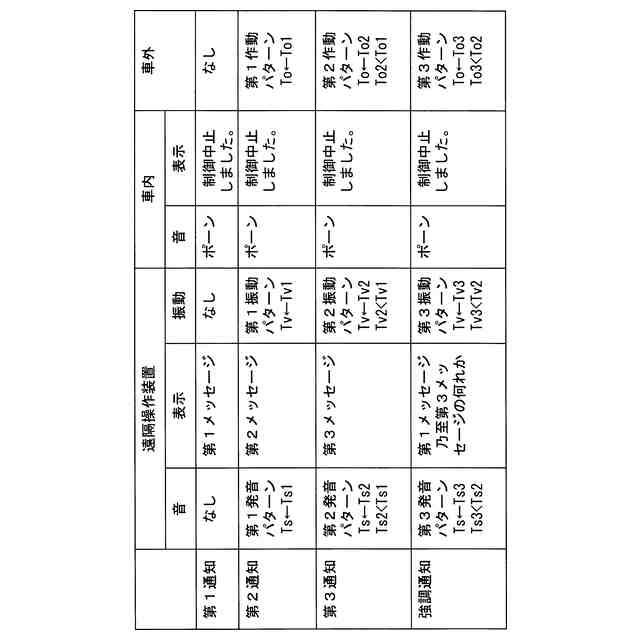
中止条件が成立した場合に行われる各通知をまとめた図である。
本発明の実施形態の変形例に係る車両制御装置のECUのCPUが実行する中止通知ルーチンのフローチャートである。
【発明を実施するための形態】
【0010】
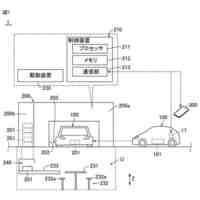
図1に示したように、本実施形態に係る車両制御システムは、「車両VAに適用される車両制御装置10」及び遠隔操作装置40を備える。車両制御装置10及び遠隔操作装置40はネットワークNWを介して通信可能に接続されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
装置
1日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
電極
1日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
軸部材
9日前
トヨタ自動車株式会社
自動車
8日前
トヨタ自動車株式会社
ステータ
1日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
蓄電装置
8日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
ホッパー
4日前
トヨタ自動車株式会社
監視装置
8日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電セル
4日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
駆動装置
10日前
トヨタ自動車株式会社
電池セル
1日前
トヨタ自動車株式会社
操船装置
8日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
充電装置
3日前
トヨタ自動車株式会社
運搬車両
9日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
電池セル
1日前
トヨタ自動車株式会社
固体電池
1日前
トヨタ自動車株式会社
電動車両
10日前
トヨタ自動車株式会社
電源装置
1日前
トヨタ自動車株式会社
蓄電装置
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ