TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095425
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211418
出願日
2023-12-14
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
A01C
15/00 20060101AFI20250619BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】従来技術に比べて、圃場の状況に応じた施肥を行うこと。
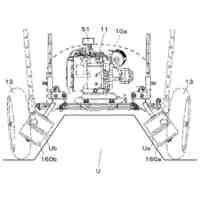
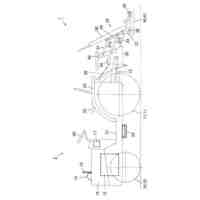
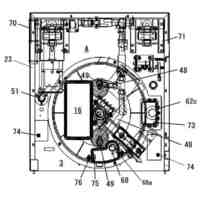
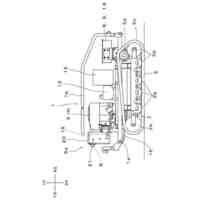
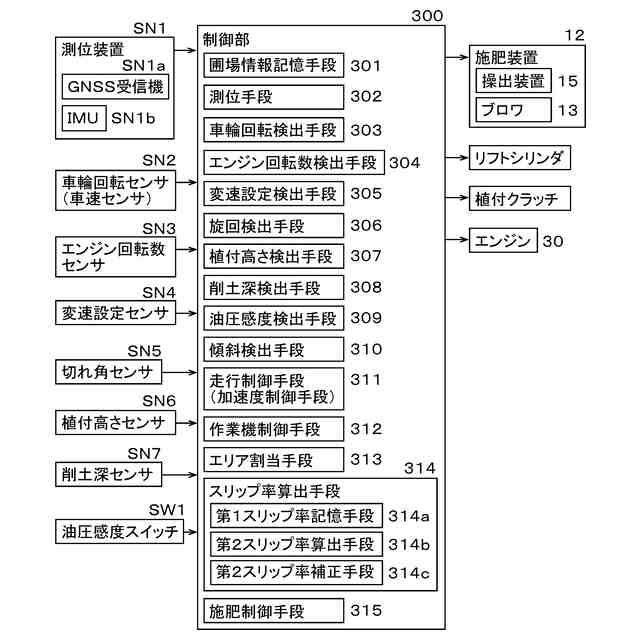
【解決手段】肥料の散布量と散布位置とが関連付けられた情報と、測位装置(SN1)で計測された車体(4)の位置とに基づいて、繰出装置(15)の繰出量を制御することで、従来技術に比べて、圃場の状況に応じた施肥を行うことができる。
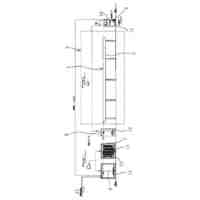
【選択図】図5
特許請求の範囲
【請求項1】
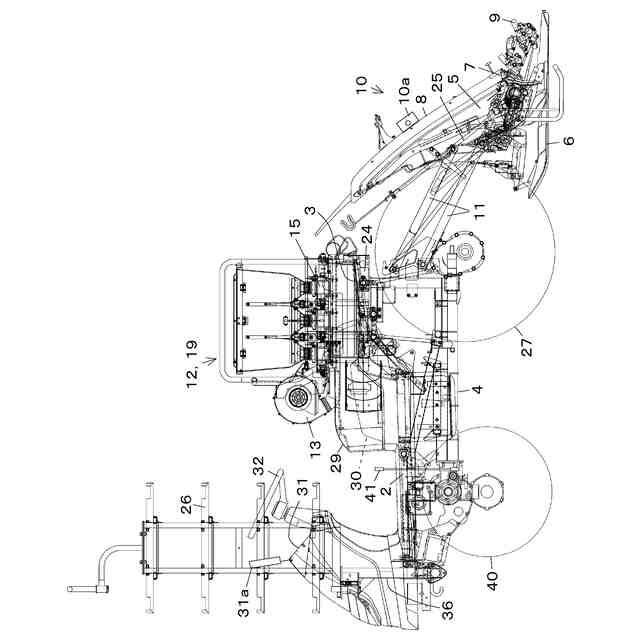
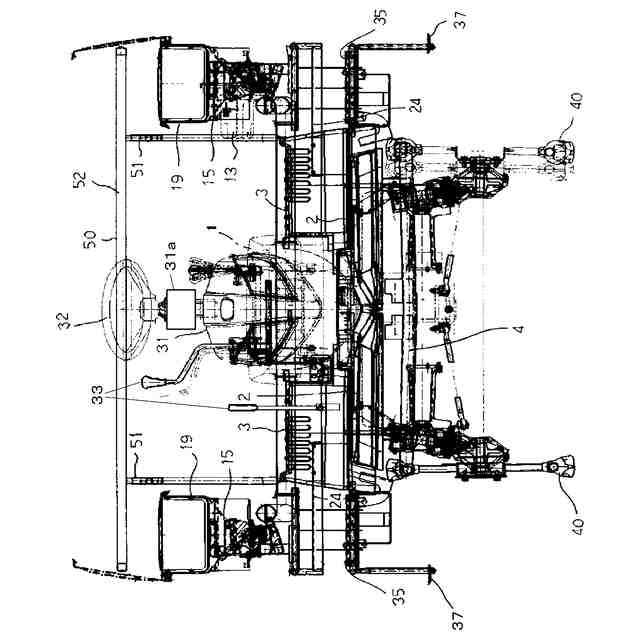
車体(4)と、
前記車体(4)の位置を計測する測位装置(SN1)と、
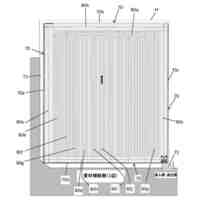
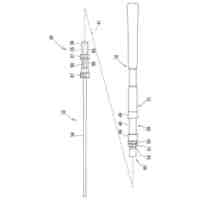
肥料が収容される収容部(19)と、前記収容部(19)から肥料を繰り出す繰出装置(15)と、を有し、圃場(400)に肥料を散布する施肥装置(12)と、
肥料の散布量と散布位置とが関連付けられた情報と、前記測位装置(SN1)で計測された車体(4)の位置とに基づいて、前記繰出装置(15)の繰出量を制御する制御手段(300)と、
を備えたことを特徴とする作業車両。
続きを表示(約 1,400 文字)
【請求項2】
前記車体(4)の走行速度が予め定められた速度に達しない場合には、前記繰出量を基準の走行速度時よりも少ない繰出量に設定する前記制御手段(300)、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記繰出装置(15)の繰出量を変更する加速度の範囲内に前記車体(4)の加速度を制御する前記制御手段(300)、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項4】
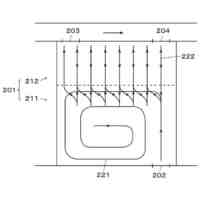
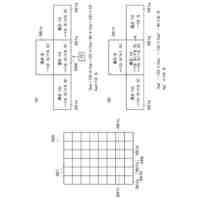
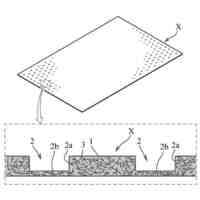
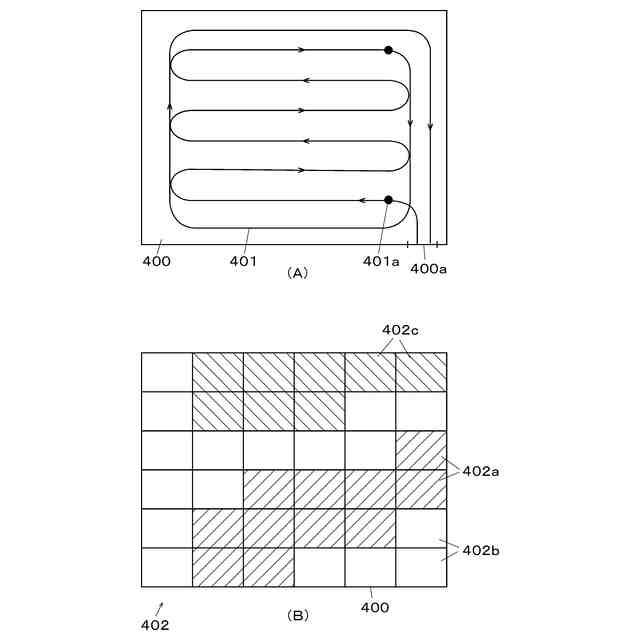
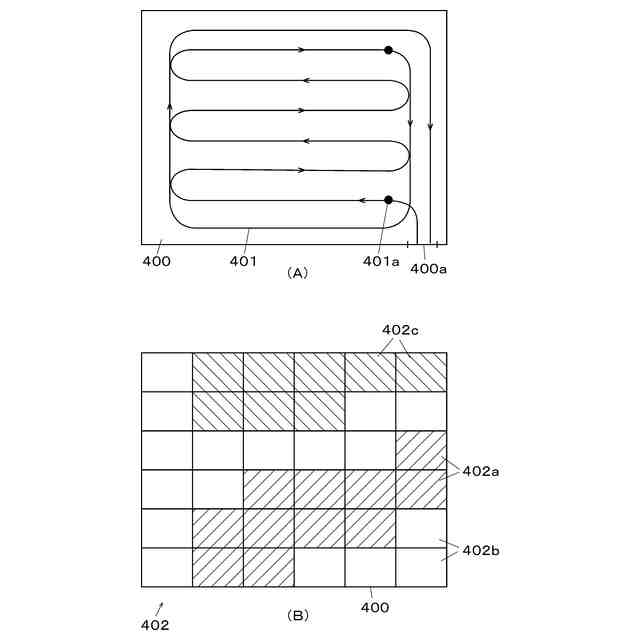
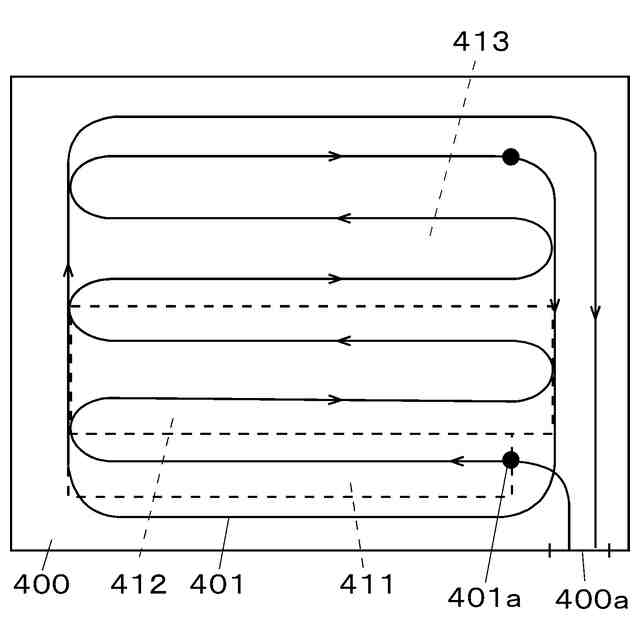
予め定められた第1のスリップ率と、前記車体(4)の車輪(27)の回転数と前記測位装置(SN1)の計測結果とに基づいて算出される第2のスリップ率と、を有し、前記車体(4)の車輪(27)が走行時に滑るスリップ率について、
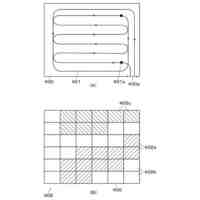
前記第1のスリップ率を使用して前記施肥装置(12)の制御を行う第1のエリア(411)と、前記第2のスリップ率を算出する第2のエリア(412)と、前記第2のスリップ率を使用して前記施肥装置(12)の制御を行う第3のエリア(413)と、が、前記圃場(400)に割り当てられた
ことを特徴とする請求項1に記載の作業車両。
【請求項5】
作業開始から予め定められた範囲を前記第1のエリア(411)に割り当て、前記第1のエリア(411)での作業完了後の予め定められた範囲に前記第2のエリア(412)を割り当て、前記第2のエリア(412)での作業完了後の残りの前記圃場(400)の範囲に前記第3のエリア(413)を割り当て、前記第3のエリア(413)において走行中に前記第2のスリップ率を補正するとともに、前記第2のスリップ率が算出された圃場(400)の次に作業が行われる圃場(400)では、前記作業開始から前記第2のスリップ率を使用して前記施肥装置(12)の制御を行う前記制御手段(300)、
を備えたことを特徴とする請求項4に記載の作業車両。
【請求項6】
前記第2のスリップ率の算出中に前記測位装置(SN1)での測位不良が発生した場合には、前記第2のスリップ率の再算出中は前記第1のスリップ率を使用する前記制御手段(300)、
を備えたことを特徴とする請求項4に記載の作業車両。
【請求項7】
予め定められた角度以上旋回した場合は、前記第1のスリップ率を使用する前記制御手段(300)、
を備えたことを特徴とする請求項4に記載の作業車両。
【請求項8】
エンジン(30)の回転を変速する変速装置(HST)と、
前記変速装置(HST)で変速された車輪(27)の回転数の理論値と、前記車輪(27)の回転数の計測値と、に基づいて、前記スリップ率を補正する前記制御手段(300)と、
を備えたことを特徴とする請求項4に記載の作業車両。
【請求項9】
エンジン(30)の回転数を計測するエンジン回転数検出部材(SN3)と、
前記エンジン(30)の回転を変速する変速装置(HST)と、
前記変速装置(HST)の変速設定から算出されるエンジン回転数の理論値と、前記エンジン回転数検出部材(SN3)によるエンジン回転数の計測値と、に基づいて、前記スリップ率を補正する前記制御手段(300)と、
を備えたことを特徴とする請求項4に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、田植機、トラクタ等の作業車両に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
田植機やトラクタ等の作業車両において、肥料等の粉粒状の農業資材を繰り出す繰り出し部を第1電動モータで駆動する際に、第1電動モータが過負荷の場合は、第2電動モータで駆動軸を駆動する技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2019-165712号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、肥料詰まり等で繰り出し部の負荷が大きくなった場合に対応可能であり、繰り出し部から所定の農業資材を繰り出すための技術である。圃場は、土壌や土質の片寄り、ムラがあり、肥沃度の分布、ムラが存在し、肥沃度のムラが存在すると作物の生育にもムラが発生する。特許文献1に記載の技術のように、一定量の肥料を散布する技術では、肥沃度のムラの抑制には限界がある問題がある。
【0005】
本発明は、従来技術に比べて、圃場の状況に応じた施肥を行うことを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、車体(4)と、前記車体(4)の位置を計測する測位装置(SN1)と、肥料が収容される収容部(19)と、前記収容部(19)から肥料を繰り出す繰出装置(15)と、を有し、圃場(400)に肥料を散布する施肥装置(12)と、肥料の散布量と散布位置とが関連付けられた情報と、前記測位装置(SN1)で計測された車体(4)の位置とに基づいて、前記繰出装置(15)の繰出量を制御する制御手段(300)とを備えたことを特徴とする作業車両である。
【0007】
請求項2に記載の発明は、前記車体(4)の走行速度が予め定められた速度に達しない場合には、前記繰出量を基準の走行速度時よりも少ない繰出量に設定する前記制御手段(300)を備えたことを特徴とする請求項1に記載の作業車両である。
【0008】
請求項3に記載の発明は、前記繰出装置(15)の繰出量を変更する加速度の範囲内に前記車体(4)の加速度を制御する前記制御手段(300)を備えたことを特徴とする請求項1に記載の作業車両である。
【0009】
請求項4に記載の発明は、予め定められた第1のスリップ率と、前記車体(4)の車輪(27)の回転数と前記測位装置(SN1)の計測結果とに基づいて算出される第2のスリップ率と、を有し、前記車体(4)の車輪(27)が走行時に滑るスリップ率について、前記第1のスリップ率を使用して前記施肥装置(12)の制御を行う第1のエリア(411)と、前記第2のスリップ率を算出する第2のエリア(412)と、前記第2のスリップ率を使用して前記施肥装置(12)の制御を行う第3のエリア(413)と、が、前記圃場(400)に割り当てられたことを特徴とする請求項1に記載の作業車両である。
【0010】
請求項5に記載の発明は、作業開始から予め定められた範囲を前記第1のエリア(411)に割り当て、前記第1のエリア(411)での作業完了後の予め定められた範囲に前記第2のエリア(412)を割り当て、前記第2のエリア(412)での作業完了後の残りの前記圃場(400)の範囲に前記第3のエリア(413)を割り当て、前記第3のエリア(413)において走行中に前記第2のスリップ率を補正するとともに、前記第2のスリップ率が算出された圃場(400)の次に作業が行われる圃場(400)では、前記作業開始から前記第2のスリップ率を使用して前記施肥装置(12)の制御を行う前記制御手段(300)を備えたことを特徴とする請求項4に記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
今日
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
コンバイン
8日前
井関農機株式会社
苗移植作業機
7日前
井関農機株式会社
圃場管理装置
1日前
井関農機株式会社
圃場管理装置
7日前
井関農機株式会社
汎用コンバイン
7日前
井関農機株式会社
汎用コンバイン
7日前
井関農機株式会社
水田管理システム
7日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
洗米装置
9日前
井関農機株式会社
作業車両
今日
個人
播種機
今日
個人
尿処理材
15日前
株式会社アテックス
草刈機
23日前
個人
水耕栽培システム
24日前
井関農機株式会社
圃場管理装置
15日前
井関農機株式会社
圃場管理装置
1日前
井関農機株式会社
圃場管理装置
7日前
株式会社西部技研
空調システム
20日前
井関農機株式会社
圃場管理装置
15日前
井関農機株式会社
圃場管理装置
15日前
井関農機株式会社
移植機
今日
井関農機株式会社
作業車両
7日前
株式会社シマノ
釣竿
17日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ