TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095428
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211422
出願日
2023-12-14
発明の名称
移植機
出願人
井関農機株式会社
代理人
個人
主分類
A01B
69/00 20060101AFI20250619BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動走行の終了を手動で操作する従来技術に比べて、作物が植え付けられる範囲のバラつきを抑制すること。
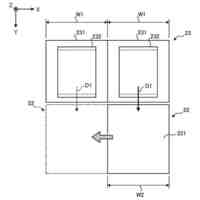
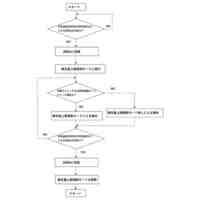
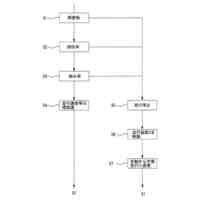
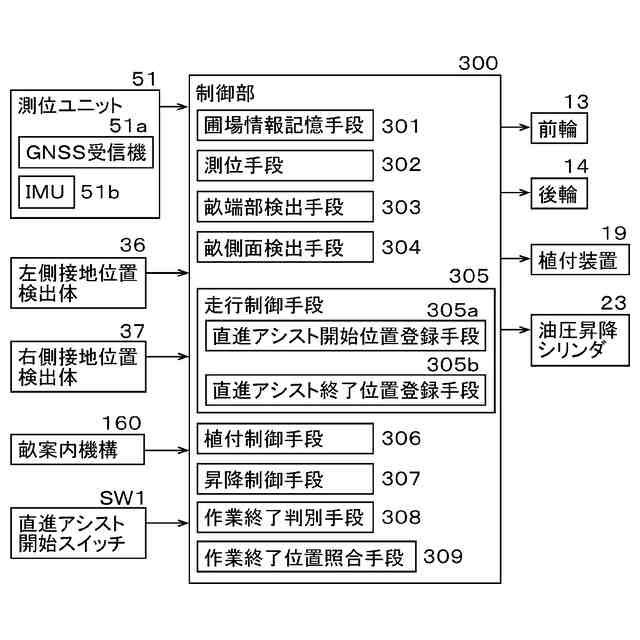
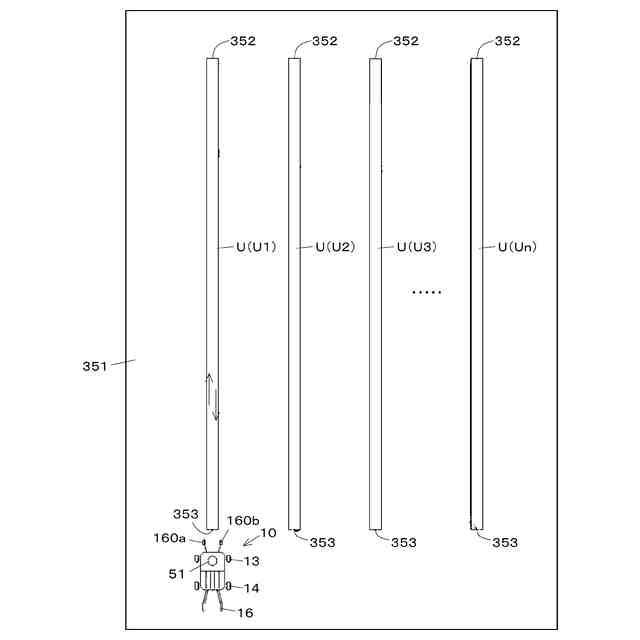
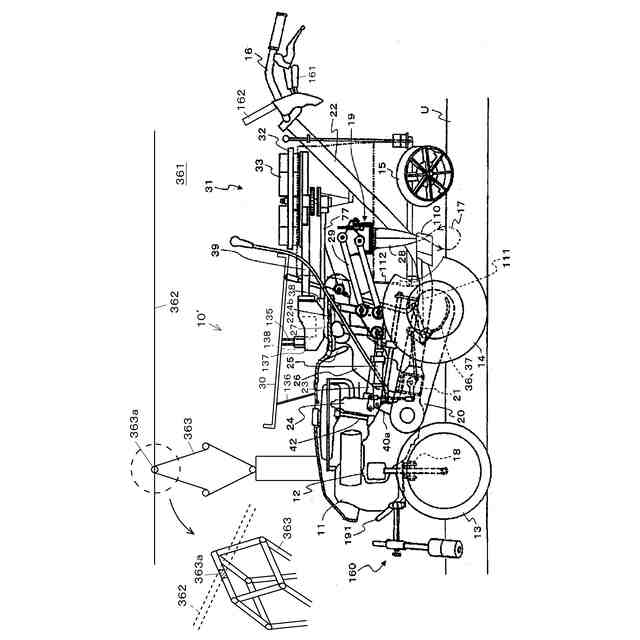
【解決手段】畝(U)を検出する検出部材(36,37)の検出結果に基づいて畝(U)の一端(352)まで走行車体(10a)が到達したことを判別し、第1の方向に対して畝(U)の一端(352)まで走行車体(10a)が到達した場合に、昇降装置(23)を制御して走行車体(10a)を上昇させ、第1の方向とは逆方向の第2の方向に沿って走行車体(10a)を走行させることで、自動走行の終了を手動で操作する従来技術に比べて、作物が植え付けられる範囲のバラつきを抑制することができる。また、第2の方向への走行時に畝や植え付けられた苗の損傷を抑制できる。
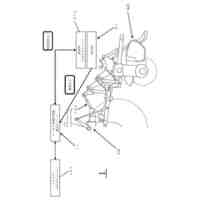
【選択図】図5
特許請求の範囲
【請求項1】
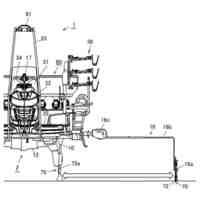
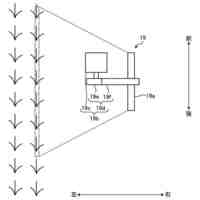
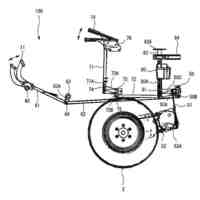
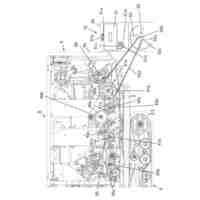
走行車体(10a)に設けられて、苗を植え付ける植付装置(19)と、
苗が植えつけられる畝(U)に対して、前記走行車体(10a)を昇降させる昇降装置(23)と、
前記走行車体(10a)を走行させる走行装置(13,14)と、
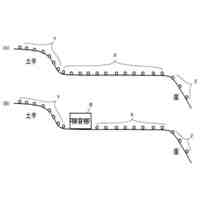
前記植付装置(19)で苗を植え付けながら前記走行装置(13,14)を制御して前記畝(U)に沿って前記走行車体(10a)を走行させるとともに、前記畝(U)を検出する検出部材(36,37)の検出結果に基づいて、前記畝(U)の一端(352)まで前記走行車体(10a)が到達したことを判別し、予め定められた第1の方向に対して前記畝(U)の一端(352)まで前記走行車体(10a)が到達した場合に、前記昇降装置(23)を制御して前記走行車体(10a)を上昇させ、前記第1の方向とは逆方向の第2の方向に沿って前記走行車体(10a)を走行させる制御部(300)と、
を備えたことを特徴とする移植機(10)。
続きを表示(約 1,300 文字)
【請求項2】
前記畝(U)に接触して前記畝(U)を検出する畝高さ検出部材(36,37)で構成された前記検出部材(36,37)と、
前記畝高さ検出部材(36,37)の検出結果に基づいて、前記畝(U)の一端(352)まで前記走行車体(10a)が到達したことを判別する前記制御部(300)と、
を備えたことを特徴とする請求項1に記載の移植機(10)。
【請求項3】
前記第1の方向に沿って前記走行車体(10a)を走行させる第1の走行速度よりも、前記第2の方向に沿って前記走行車体(10a)を走行させる第2の走行速度の方が高速に制御する前記制御部(300)、
を備えたことを特徴とする請求項1に記載の移植機(10)。
【請求項4】
前記第2の方向に沿って前記走行車体(10a)を走行させて前記畝(U)の他端(353)まで前記走行車体(10a)が到達した場合に、前記走行車体(10a)の走行を停止させるとともに、前記昇降装置(23)を制御して前記走行車体(10a)を下降させる前記制御部(300)、
を備えたことを特徴とする請求項1に記載の移植機(10)。
【請求項5】
前記走行車体(10a)の現在位置を計測する測位装置(51)と、
前記第1の方向に沿った前記走行車体(10a)の走行を開始する入力を行う開始入力部材(SW1)と、
前記開始入力部材(SW1)の入力がされた際に前記測位装置(51)で計測された位置を開始位置に設定し、前記畝(U)の一端(352)まで到達した際に前記測位装置(51)で計測された位置を終了位置に設定し、前記終了位置と前記開始位置とに基づいて前記第2の方向に沿って前記走行車体(10a)を走行させる前記制御部(300)と、
を備えたことを特徴とする請求項1に記載の移植機(10)。
【請求項6】
前記第2の方向に沿った走行で前記走行車体(10a)が前記開始位置に到達した後に、前記開始入力部材(SW1)の入力がされた場合に、前記開始入力部材(SW1)の入力がされた際に前記測位装置(51)で計測された位置を開始位置に再設定し、再設定された前記開始位置から前記走行車体(10a)を前記畝(U)に沿って走行させて前記畝(U)の一端(352)まで到達した際に前記測位装置(51)で計測された位置を終了位置に再設定する前記制御部(300)、
を備えたことを特徴とする請求項5に記載の移植機(10)。
【請求項7】
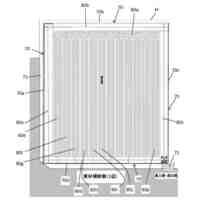
複数の畝(U)が形成された圃場(351)に関する圃場情報に基づいて、前記圃場(351)の外縁に隣接して形成された畝(U)において前記第2の方向に沿った走行を終了した場合に、前記走行車体(10a)での作業を停止させるとともに、前記走行車体(10a)での作業を停止させた位置と前記圃場情報に記憶された畝(U)の位置とのずれを照合する前記制御部(300)、
を備えたことを特徴とする請求項1に記載の移植機(10)。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場に苗を移植する移植機に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
圃場に苗を移植する移植機に関して、衛星測位信号を用いた直線の自動走行において、作業装置に動力を伝達する作業クラッチの遮断、作業装置の上昇操作、旋回操作、マーカ操作がされると、自動走行を「切」にする(直進アシストをオフにする)技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2020-178号公報(特に、請求項10)
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のような従来の構成では、作業装置のクラッチ遮断や上昇操作、マーカ操作、旋回操作は、いずれも作業者が手動で行う操作であるため、圃場の状況に合わせた対応が可能ではあるが、逆に、ばらつきも発生する。したがって、自動走行が停止する位置もバラつきが発生し、作物が植えつけられる範囲にバラつきが発生する問題がある。したがって、作物の生育や収量にもバラつきが発生する問題がある。
【0005】
本発明は、自動走行の終了を手動で操作する従来技術に比べて、作物が植え付けられる範囲のバラつきを抑制することを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は、次の解決手段により解決される。
すなわち、請求項1に記載の発明は、走行車体(10a)に設けられて、苗を植え付ける植付装置(19)と、苗が植えつけられる畝(U)に対して、前記走行車体(10a)を昇降させる昇降装置(23)と、前記走行車体(10a)を走行させる走行装置(13,14)と、前記植付装置(19)で苗を植え付けながら前記走行装置(13,14)を制御して前記畝(U)に沿って前記走行車体(10a)を走行させるとともに、前記畝(U)を検出する検出部材(36,37)の検出結果に基づいて、前記畝(U)の一端(352)まで前記走行車体(10a)が到達したことを判別し、予め定められた第1の方向に対して前記畝(U)の一端(352)まで前記走行車体(10a)が到達した場合に、前記昇降装置(23)を制御して前記走行車体(10a)を上昇させ、前記第1の方向とは逆方向の第2の方向に沿って前記走行車体(10a)を走行させる制御部(300)とを備えたことを特徴とする移植機(10)である。
【0007】
請求項2に記載の発明は、前記畝(U)に接触して前記畝(U)を検出する畝高さ検出部材(36,37)で構成された前記検出部材(36,37)と、前記畝高さ検出部材(36,37)の検出結果に基づいて、前記畝(U)の一端(352)まで前記走行車体(10a)が到達したことを判別する前記制御部(300)とを備えたことを特徴とする請求項1に記載の移植機(10)である。
【0008】
請求項3に記載の発明は、前記第1の方向に沿って前記走行車体(10a)を走行させる第1の走行速度よりも、前記第2の方向に沿って前記走行車体(10a)を走行させる第2の走行速度の方が高速に制御する前記制御部(300)を備えたことを特徴とする請求項1に記載の移植機(10)である。
【0009】
請求項4に記載の発明は、前記第2の方向に沿って前記走行車体(10a)を走行させて前記畝(U)の他端(353)まで前記走行車体(10a)が到達した場合に、前記走行車体(10a)の走行を停止させるとともに、前記昇降装置(23)を制御して前記走行車体(10a)を下降させる前記制御部(300)を備えたことを特徴とする請求項1に記載の移植機(10)である。
【0010】
請求項5に記載の発明は、前記走行車体(10a)の現在位置を計測する測位装置(51)と、前記第1の方向に沿った前記走行車体(10a)の走行を開始する入力を行う開始入力部材(SW1)と、前記開始入力部材(SW1)の入力がされた際に前記測位装置(51)で計測された位置を開始位置に設定し、前記畝(U)の一端(352)まで到達した際に前記測位装置(51)で計測された位置を終了位置に設定し、前記終了位置と前記開始位置とに基づいて前記第2の方向に沿って前記走行車体(10a)を走行させる前記制御部(300)とを備えたことを特徴とする請求項1に記載の移植機(10)である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
1か月前
井関農機株式会社
田植機
8日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
14日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
精米設備
1か月前
井関農機株式会社
コンバイン
1日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
乗用草刈機
1か月前
井関農機株式会社
圃場作業機
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
乗用草刈機
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
9日前
井関農機株式会社
施肥作業機
1か月前
井関農機株式会社
乗用型田植機
1か月前
井関農機株式会社
作業システム
今日
井関農機株式会社
歩行型管理機
1か月前
井関農機株式会社
水田除草装置
12日前
井関農機株式会社
乗用型田植機
13日前
井関農機株式会社
充電システム
21日前
井関農機株式会社
多目的作業車両
1か月前
井関農機株式会社
電動乗用田植機
6日前
井関農機株式会社
植物栽培施設用作業車
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ