TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095774
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023212061
出願日
2023-12-15
発明の名称
画像処理装置、画像処理方法及びプログラム
出願人
キヤノン株式会社
代理人
弁理士法人谷・阿部特許事務所
主分類
G06T
7/20 20170101AFI20250619BHJP(計算;計数)
要約
【課題】3Dモデルのトラッキング処理においてトラック間の形状差を低減することを目的とする。
【解決手段】オブジェクトの三次元形状を表す3Dモデルを含んだフレーム群から成る時系列形状データに対し、隣り合うトラック間で重複区間が生じるようにトラッキング処理を行う。そして、トラッキング処理の結果に基づき、重複区間内のいずれかの位置をトラック境界として、隣り合うトラック間で重複区間のないトラッキング済み時系列形状データを出力する。
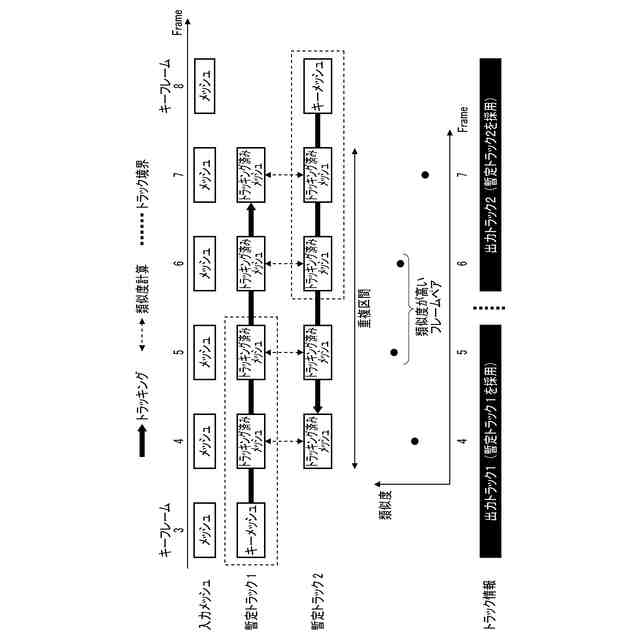
【選択図】図7
特許請求の範囲
【請求項1】
オブジェクトの三次元形状を表す3Dモデルを含んだフレーム群から成る時系列形状データを取得する取得手段と、
隣り合うトラック間で重複区間が生じるように前記時系列形状データに対しトラッキング処理を行うトラッキング手段と、
前記トラッキング処理の結果に基づき、前記重複区間内のいずれかの位置をトラック境界として、隣り合うトラック間で重複区間のないトラッキング済み時系列形状データを出力する出力手段と、
を有し、
前記トラックは、前記3Dモデルの構成要素がフレーム間で追跡されている区間であって、共通のトポロジが維持されているフレーム区間を示す、
ことを特徴とする画像処理装置。
続きを表示(約 1,100 文字)
【請求項2】
前記トラッキング手段は、
前記フレーム群について設定された複数のキーフレームに基づいて、時系列方向及び逆時系列方向の二方向へトラッキング処理を行う、
ことを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記トラッキング手段は、隣り合うキーフレームの間隔の半分を超えるフレーム数で前記二方向にトラッキング処理を行う、ことを特徴とする請求項2に記載の画像処理装置。
【請求項4】
前記トラッキング手段は、あるキーフレームから次のキーフレームまでを1つのトラックとして前記二方向にトラッキング処理を行う、ことを特徴とする請求項3に記載の画像処理装置。
【請求項5】
前記トラッキング手段は、
前記フレーム群について設定された複数のキーフレームに基づいて、時系列方向又は逆時系列方向のいずれか一方向へトラッキング処理を行う、
ことを特徴とする請求項1に記載の画像処理装置。
【請求項6】
前記トラッキング手段は、隣のキーフレームを越えた数フレーム先までを1つのトラックとして前記一方向のトラッキング処理を行う、ことを特徴とする請求項5に記載の画像処理装置。
【請求項7】
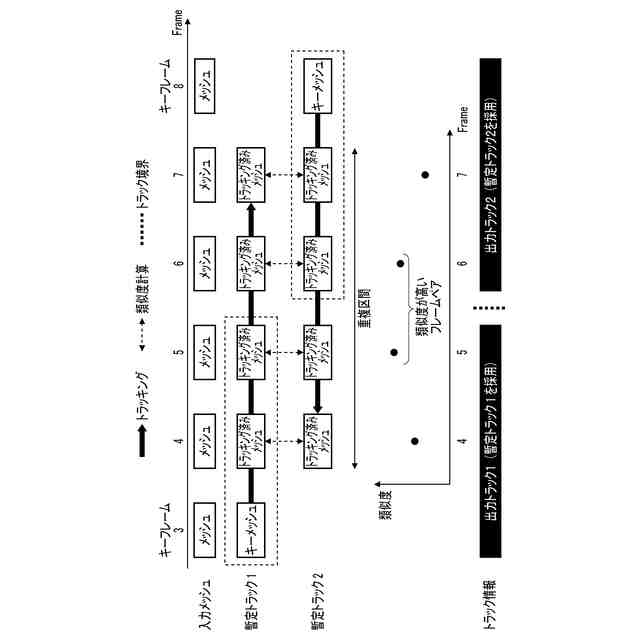
前記重複区間に含まれる各フレームにおける前記隣り合うトラックそれぞれのトラッキング済み3Dモデルが表す形状の差に基づいて、前記トラック境界を決定する決定手段をさらに有する、ことを特徴とする請求項1に記載の画像処理装置。
【請求項8】
前記決定手段は、
前記重複区間に含まれるフレーム単位で、前記隣り合うトラックそれぞれのトラッキング済み3Dモデルが表す形状の類似度を算出し、
算出された前記形状の類似度の高かったフレームペアを特定し、
特定された前記フレームペアの間を、前記トラック境界に決定する、
ことを特徴とする請求項7に記載の画像処理装置。
【請求項9】
前記決定手段は、前記重複区間に含まれる各フレームの中で前記形状の類似度が最も高かったフレームと、当該フレームの両隣のフレームのうち前記形状の類似度が高かった方のフレームとの組合せを、前記フレームペアとして特定する、ことを特徴とする請求項8に記載の画像処理装置。
【請求項10】
前記決定手段は、前記重複区間に含まれる各フレームの中で隣り合う2つのフレームにおける前記形状の類似度の総和が最大となる組み合わせを、前記フレームペアとして特定する、ことを特徴とする請求項8に記載の画像処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、オブジェクトの三次元形状データのトラッキング技術に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、映像作成の分野では、オブジェクト(被写体)の三次元形状を表すデータ(一般に「3Dモデル」と呼ばれる。)を三次元空間内に再構成し、CGによる演出を加えて自由な視点から映像化するボリュメトリックビデオ技術が一般的になりつつある。ここで、生成した3Dモデルのデータをボリュメトリックビデオの生成装置等に転送する際のデータ圧縮の前処理として、3Dモデルのトラッキング処理が行われている。このトラッキング処理は、動画を構成する一連のフレーム群において、3Dモデルが表す三次元形状の各構成要素をフレーム間で対応付ける技術である。
【先行技術文献】
【特許文献】
【0003】
US2017/0024930
特開2006-39622号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
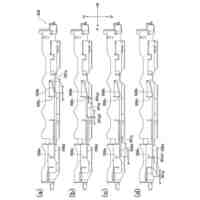
例えばメッシュ形式の3Dモデルに対するトラッキング処理の場合、トラッキング範囲(メッシュを構成するポリゴンの頂点が追跡されているフレーム区間。以下、「トラック」と呼ぶ。)で共通のトポロジを維持した状態になる。よって、メッシュを構成するポリゴンの頂点位置を動かすことで、トラック内の各フレームにおいて滑らかな形状変化の表現を実現することができる。しかしながら、トラックが切り替わる部分では共通のトポロジが維持されておらず、また、他トラックが自トラックと同じ正解形状に対してトラッキングしていても完全には形状が一致せず、形状差がトラック間で発生する。特に、リライティング処理を加えたレンダリングのように形状に依存した映像表現を行っていると、トラックの切り替わり時の形状変化が映像の急峻な変化として現れ、視聴者に違和感を与えることになる。図17の(a)~(d)は、トラックの切り替わり部分で映像にガタツキが生じた一例を示す図であり、(a)のフレームから(d)のフレームに向かって時間が進行したときの各状態を示している。この例では(c)と(d)の間でトラックが切り替わっている((a)と(b)のフレームが同一トラックに属し、(c)と(d)のフレームが同一トラックに属している。)。トラックが切り替わる前後で人物の背中部分の形状変化が特に大きいことが分かる。
【0005】
本開示は、上述した課題を解決するためになされたものであり、3Dモデルのトラッキング処理においてトラック間の形状差を低減することを目的とする。
【課題を解決するための手段】
【0006】
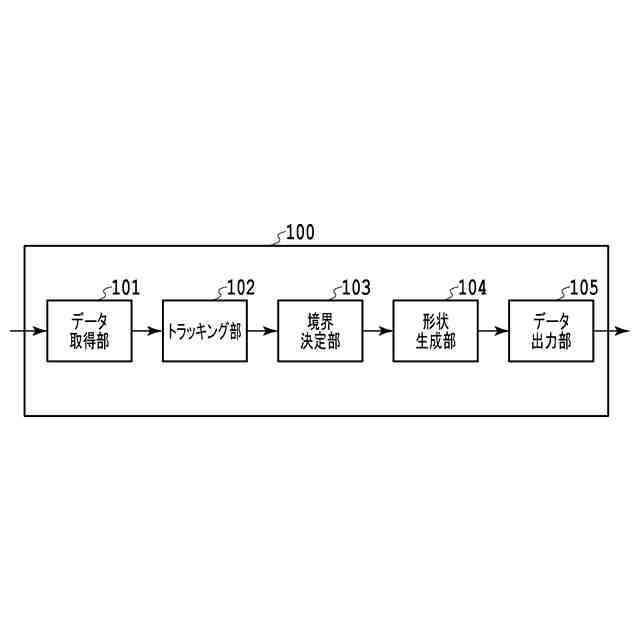
本開示に係る画像処理装置は、オブジェクトの三次元形状を表す3Dモデルを含んだフレーム群から成る時系列形状データを取得する取得手段と、隣り合うトラック間で重複区間が生じるように前記時系列形状データに対しトラッキング処理を行うトラッキング手段と、前記トラッキング処理の結果に基づき、前記重複区間内のいずれかの位置をトラック境界として、隣り合うトラック間で重複区間のないトラッキング済み時系列形状データを出力する出力手段と、を有し、前記トラックは、前記3Dモデルの構成要素がフレーム間で追跡されている区間であって、共通のトポロジが維持されているフレーム区間を示す、ことを特徴とする。
【発明の効果】
【0007】
本開示によれば、3Dモデルのトラッキング処理においてトラック間の形状差を低減することができる。
【図面の簡単な説明】
【0008】
画像処理装置の論理構成(ソフトウェア構成)を示す機能ブロック図。
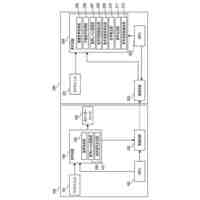
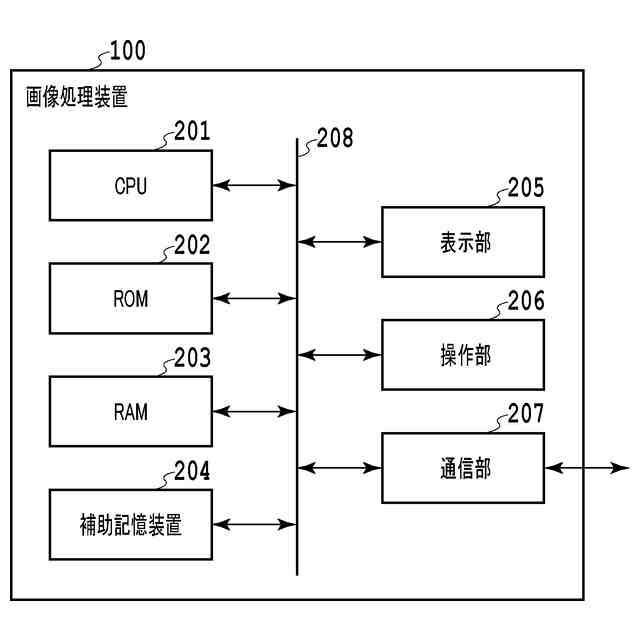
画像処理装置のハードウェア構成を示すブロック図。
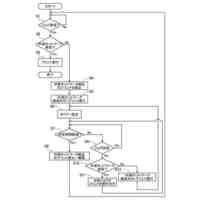
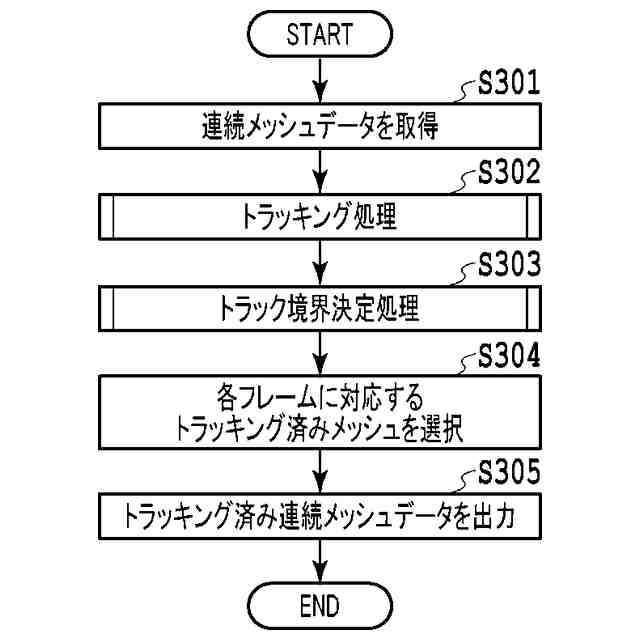
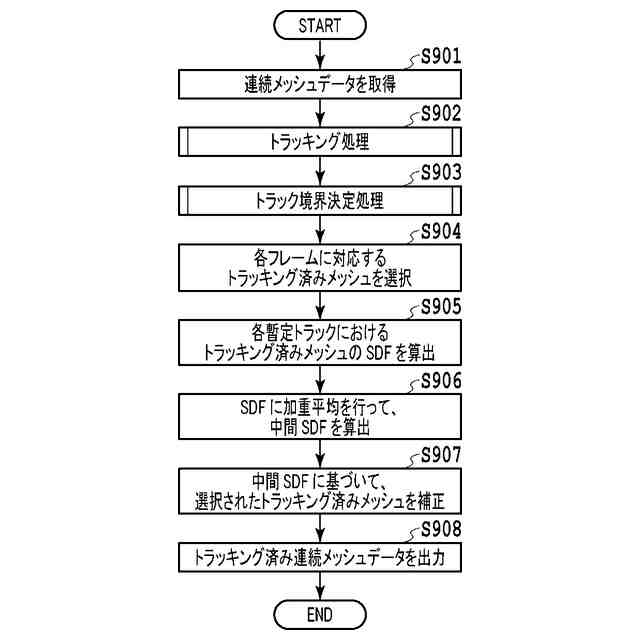
実施形態1に係る、画像処理装置の動作の流れを示すフローチャート。
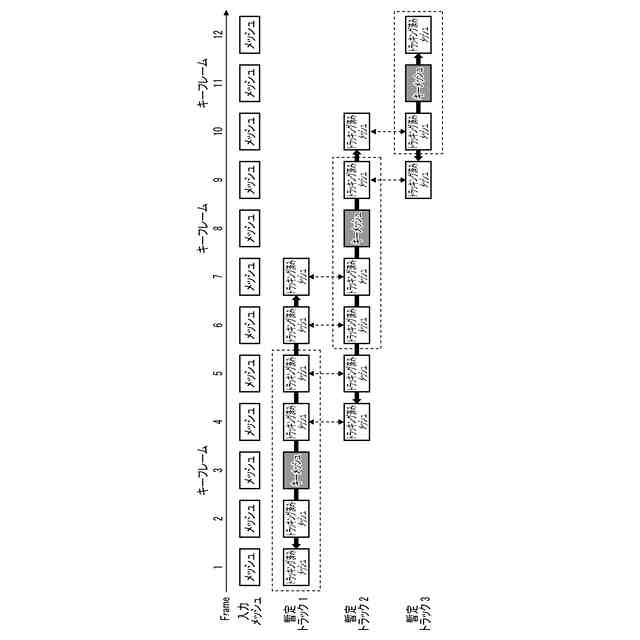
実施形態1におけるトラッキング処理の過程を説明する図。
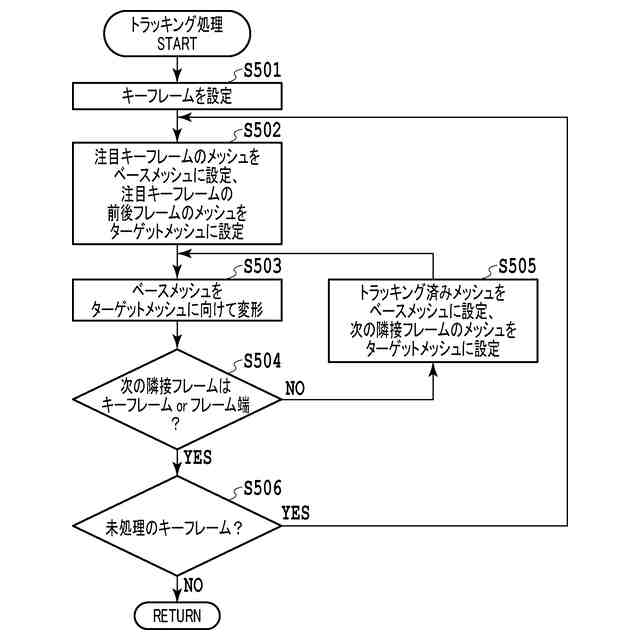
トラッキング処理の詳細を示すフローチャート。
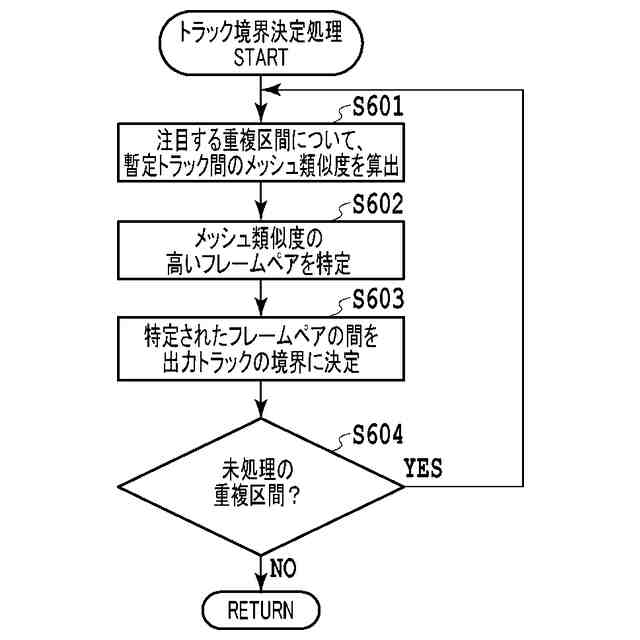
実施形態1に係る、トラック境界決定処理の詳細を示すフローチャート。
トラック境界決定処理を説明する図。
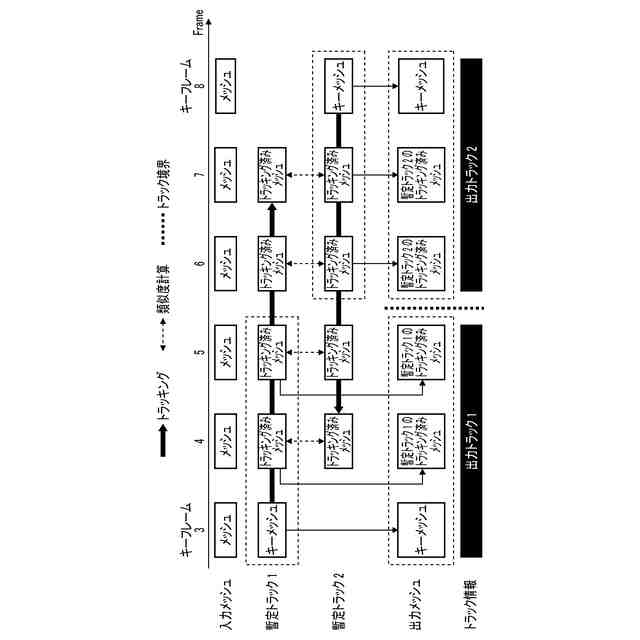
出力メッシュが生成される様子を説明する図。
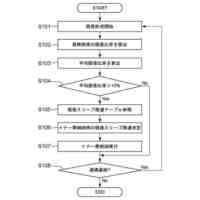
実施形態2に係る、画像処理装置の動作の流れを示すフローチャート。
実施形態2に係る、メッシュ形状の補正を説明する図。
メッシュの補正例を示す図。
中間SDF算出時の重みを説明する図。
補正方法のバリエーションを示す図。
実施形態3に係る、画像処理装置の動作の流れを示すフローチャート。
実施形態3に係る、点群形状の補正を説明する図。
点群の補正例を示す図。
解決課題を説明する図。
【発明を実施するための形態】
【0009】
以下、本実施形態を実施するための形態について図面などを参照して説明する。なお、以下の実施形態は、本開示の技術を限定するものではなく、また、以下の実施形態で説明されている全ての構成が課題を解決するための手段に必須であるとは限らない。
【0010】
(用語の定義)
本明細書において「オブジェクト」とは、人物等の三次元物体を意味する。また、「点」とは、三次元空間において1個の座標により示される、オブジェクトの三次元形状を表す際の要素を意味し、「点群形式」はオブジェクトの表面位置を1個以上の点の集合で表現する3Dモデルのデータ形式を指す。また「ポリゴン」とは、3個以上の点を頂点とした多角形面を意味し、「メッシュ形式」はオブジェクトの表面形状をポリゴンの集合で表現する3Dモデルのデータ形式を指す。また、トラッキング処理の対象となる、連続する各フレームに複数のオブジェクトそれぞれの三次元形状を示す複数の3Dモデルを含んだフレーム群のデータを「連続形状データ」或いは「時系列形状データ」と呼ぶこととする。そして、連続形状データの中でも3Dモデルがメッシュ形式で表現されているものを「連続メッシュデータ」と呼び、点群形式で表現されているものを「連続点群データ」と呼ぶこととする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
3日前
キヤノン株式会社
トナー
3日前
キヤノン株式会社
トナー
3日前
キヤノン株式会社
トナー
3日前
キヤノン株式会社
トナー
3日前
キヤノン株式会社
トナー
2日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
撮像装置
4日前
キヤノン株式会社
記録装置
2日前
キヤノン株式会社
記録装置
2日前
キヤノン株式会社
記録装置
2日前
キヤノン株式会社
電子部品
5日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
情報処理装置
5日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
音声処理装置
5日前
キヤノン株式会社
表示システム
4日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
表示システム
4日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像読取装置
2日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
液体収容容器
9日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
モータ制御装置
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ