TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095839
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023212165
出願日
2023-12-15
発明の名称
画像読取装置
出願人
キヤノン株式会社
代理人
弁理士法人秀和特許事務所
主分類
H04N
1/04 20060101AFI20250619BHJP(電気通信技術)
要約
【課題】画像を高精度に読み取ることができる画像読取装置を提供する。
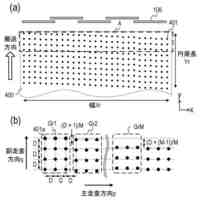
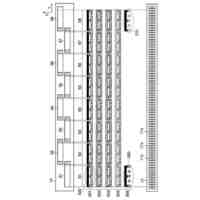
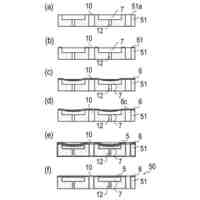
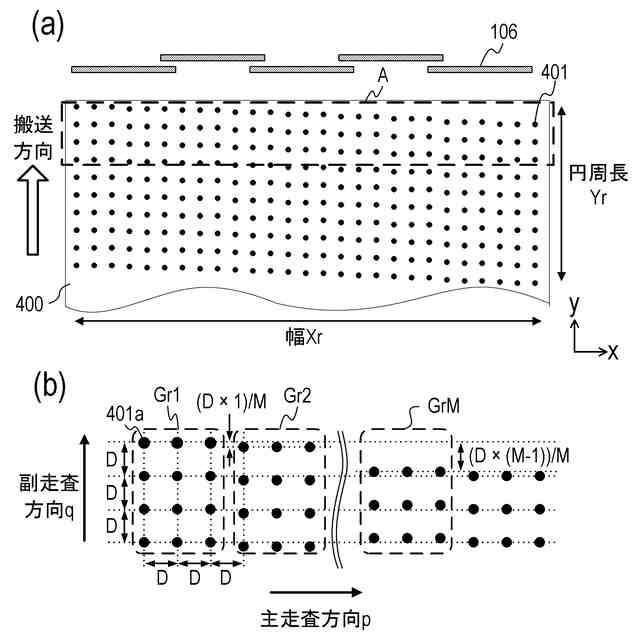
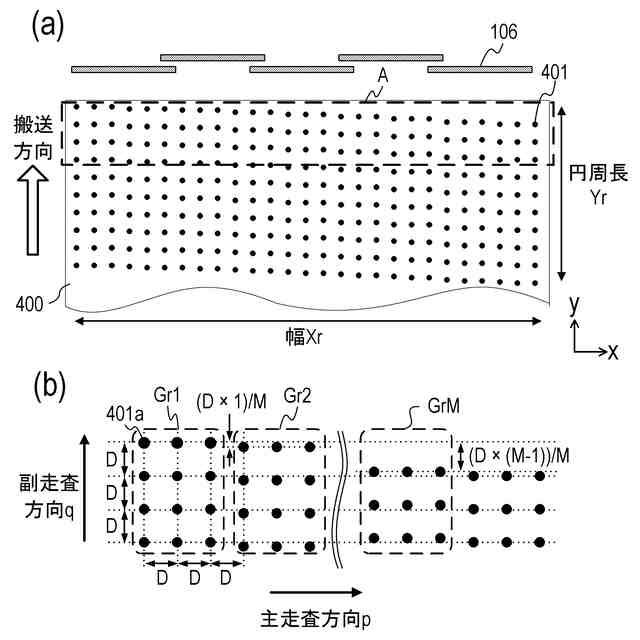
【解決手段】画像読取装置は、搬送ローラと、複数のラインイメージセンサと、複数のドットパターンが搬送方向に配列されて構成される第1ドット列と第2ドット列が印刷されたチャートを読み取ることで取得した読取データに基づき、複数のドットパターンの座標を取得する第1の取得手段と、互いに隣接するドットパターンの座標間の距離を取得する第2の取得手段と、ラインイメージセンサによる画像の読み取りのための補正値を取得する第3の取得手段と、を備える。チャート400において、第1ドット列のドットパターン401と、第2ドット列のドットパターンは互いに搬送方向にD/Mずれて配置されており、第3の取得手段は、第1ドット列のドットパターン401の座標間の搬送方向距離と、第2ドット列のドットパターンの座標間の搬送方向距離とに基づいて補正値を取得する。
【選択図】図4
特許請求の範囲
【請求項1】
原稿を搬送方向に搬送する搬送ローラと、
前記搬送ローラにより搬送される原稿の画像を読み取る複数のラインイメージセンサと、
複数のドットパターンが前記搬送方向に配列されて構成される第1ドット列と第2ドット列が前記搬送方向と交差する幅方向の異なる位置に印刷されたチャートを読み取ることで取得した読取データに基づき、複数の前記ドットパターンの座標を取得する第1の取得手段と、
前記第1の取得手段により取得された前記座標に基づき、互いに隣接するドットパターンの座標間の距離を取得する第2の取得手段と、
前記第2の取得手段により取得された前記距離に基づき、前記ラインイメージセンサによる画像の読み取りのための補正値を取得する第3の取得手段と、
を備え、
前記チャートにおいて、前記第1ドット列のドットパターンと、前記第2ドット列のドットパターンは互いに前記搬送方向にずれて配置されており、
前記第3の取得手段は、前記第2の取得手段により取得された前記第1ドット列の前記搬送方向に互いに隣接するドットパターンの座標間の搬送方向距離と、前記第2ドット列の前記搬送方向に互いに隣接するドットパターンの座標間の搬送方向距離とに基づいて前記補正値を取得することを特徴とする画像読取装置。
続きを表示(約 1,200 文字)
【請求項2】
前記補正値は、読み取り開始トリガの発生タイミングを補正するための値であることを特徴とする請求項1に記載の画像読取装置。
【請求項3】
前記チャートは、前記ドットパターンの前記搬送方向の位置が互いに同一である複数の前記第1ドット列であって、前記幅方向に並んで配置される複数の前記第1ドット列と、前記ドットパターンの前記搬送方向の位置が互いに同一である複数の前記第2ドット列であって、前記幅方向に並んで配置される複数の前記第2ドット列と、を有することを特徴とする請求項1に記載の画像読取装置。
【請求項4】
前記第2の取得手段は、複数の前記第1ドット列において前記幅方向に互いに隣接するドットパターンの座標間の幅方向距離と、複数の前記第2ドット列において前記幅方向に互いに隣接するドットパターンの座標間の幅方向距離と、を取得し、
前記第3の取得手段は、前記第2の取得手段により取得された複数の前記搬送方向距離と、複数の前記幅方向距離とに基づいて前記補正値を取得することを特徴とする請求項3に記載の画像読取装置。
【請求項5】
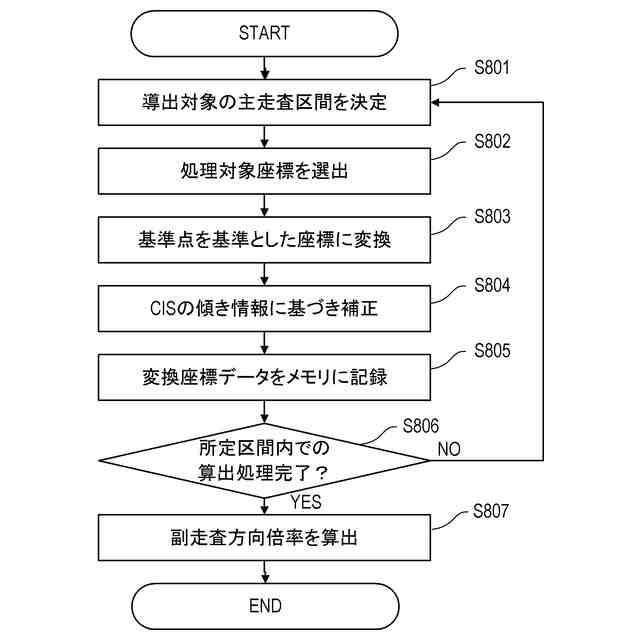
前記第3の取得手段は、前記幅方向距離を、複数の前記搬送方向距離の総和を複数の前記幅方向距離の総和で除算した値である副走査方向の倍率で除算した値をプロットすることで得られる近似曲線の式に従い、前記補正値を取得することを特徴とする請求項4に記載の画像読取装置。
【請求項6】
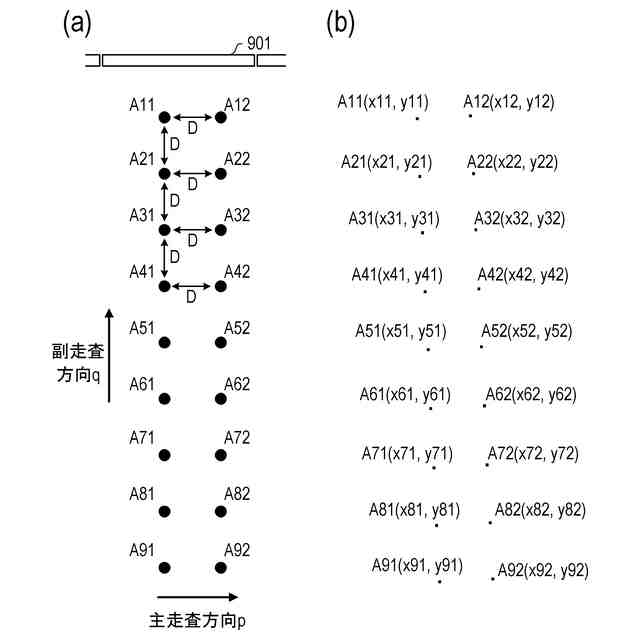
前記チャートにおいて、複数の前記ドットパターンが前記幅方向に距離Dで等間隔に配置され、
前記チャートは、前記ドットパターンの前記搬送方向の位置が互いに同一である複数のドット列により構成されるドットパターン群をM個有し、
前記第1ドット列のドットパターンと、前記第2ドット列のドットパターンの前記搬送方向のずれ量は、D/Mの倍数であることを特徴とする請求項3に記載の画像読取装置。
【請求項7】
ドットパターンの半径をRとしたとき、
前記Mは、M≧D/(2×R)を満たすことを特徴とする請求項6に記載の画像読取装置。
【請求項8】
前記ラインイメージセンサは、受光素子により構成される複数のチップを有し、
前記チャートにおいて、前記複数のチップのそれぞれの前記幅方向の位置に対応して少なくとも1つ以上の前記ドットパターン群が配置されていることを特徴とする請求項6に記載の画像読取装置。
【請求項9】
前記チャートの前記搬送方向において、前記搬送ローラの円周長にわたって前記ドットパターンが配置されていることを特徴とする請求項1に記載の画像読取装置。
【請求項10】
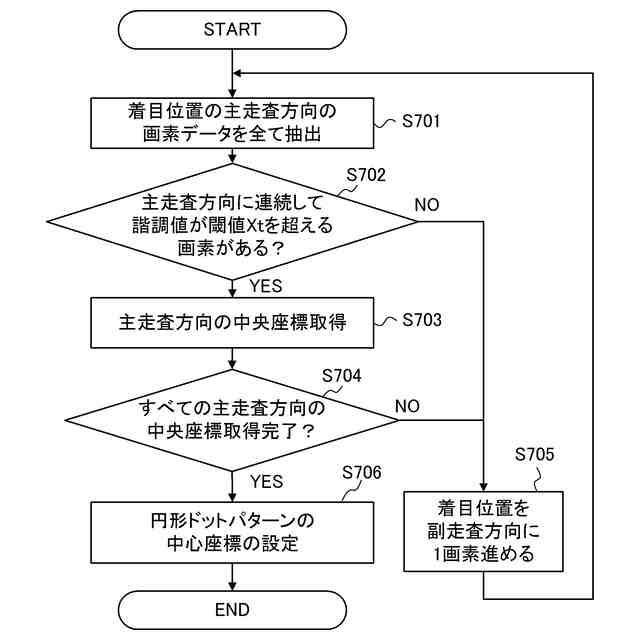
前記ドットパターンは円形であり、
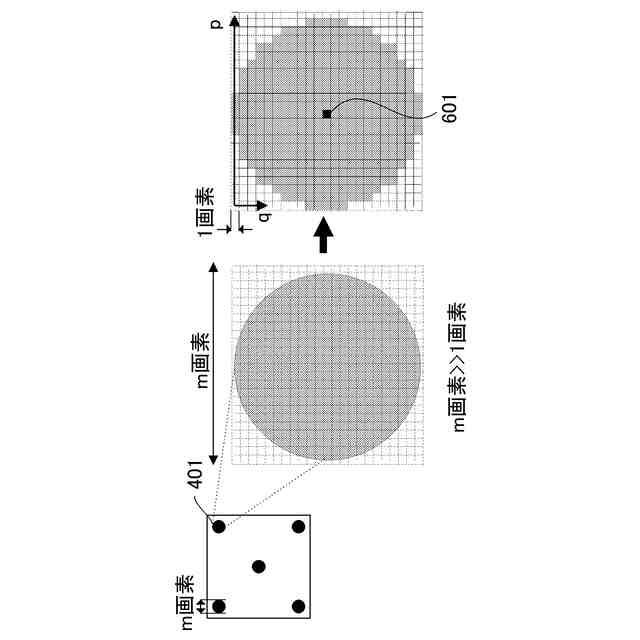
前記第1の取得手段は、前記ドットパターンの円形の中心座標を前記ドットパターンの前記座標として取得することを特徴とする請求項1に記載の画像読取装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像読取装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
大判原稿の画像読取装置としては、一般的にはコストメリットの大きい、小サイズのラインイメージセンサを複数用いる構成が採用されている。ラインイメージセンサを複数用いるため、各ラインイメージセンサで読み取ったデータをつなぎ合わせる処理が必要になる。この際、原稿搬送ローラの偏芯ずれがあると、データをつなぎ合わせる処理に誤差が生じてしまう。
【0003】
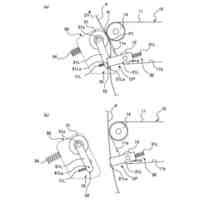
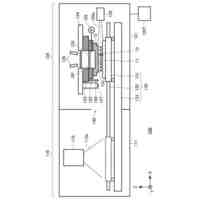
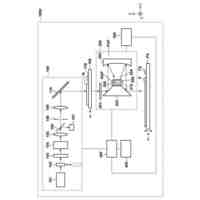
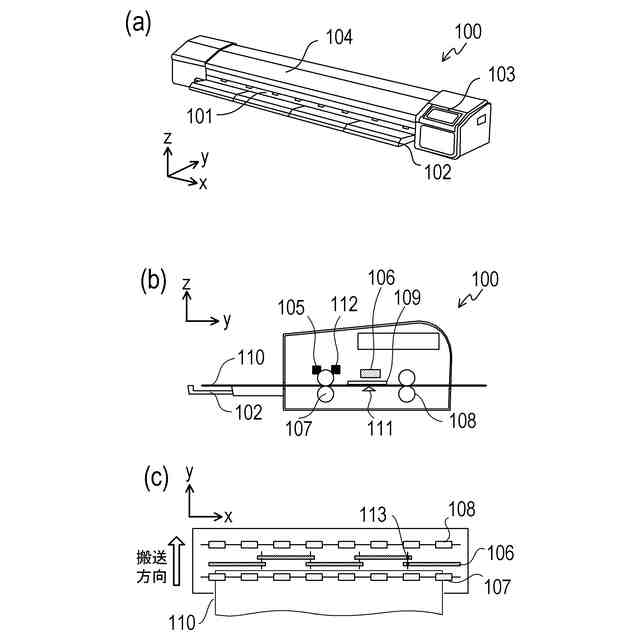
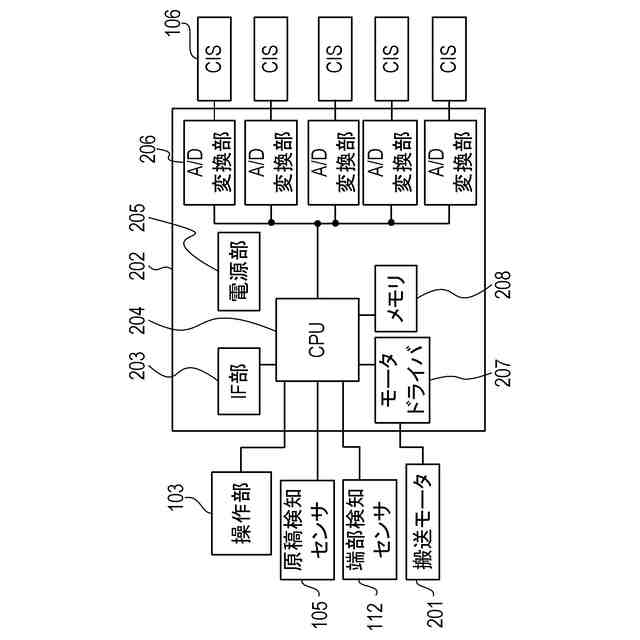
図14(a)、(b)は、複数のラインイメージセンサを用いた画像読取装置の一例の説明図である。図14(a)は、画像読取装置の読取部の構成を示し、図14(b)は、読取時に発生するずれを示す。一例として示す画像読取装置は、上流側原稿搬送ローラ107及び下流側原稿搬送ローラ108(以後、両方を同時に指す場合は原稿搬送ローラ107、108と表記)により、原稿110を搬送し、複数のラインイメージセンサ(以降、CIS)106で読み取りを行う構成となっている。複数のCIS106は、原稿の搬送方向と交差する幅方向に千鳥状に配列されている。
【0004】
複数のラインイメージセンサ106が結果を取得すると、それぞれの結果はつなぎ位置113にてつなぎ合わせる処理が行われる。その際、原稿搬送ローラ107、108のどちらか、またはそれぞれに偏芯ずれがあると、ラインイメージセンサ間の搬送方向位置ずれによりつなぎ位置に誤差が生じる。例えば、図14(b)に示すように直線のパターン1403を読み取った際には、原稿搬送ローラ107、108の偏芯ずれにより、つなぎ合わせた際につなぎ位置のずれが生じるがたついた線1404として読み取られてしまうことがある。
【0005】
上述の課題に対し、原稿搬送ローラの偏芯ずれによる読み取り時の誤差成分を前もって取得して補正するキャリブレーション処理が行われる構成が知られている。特許文献1では、キャリブレーション処理において、複数のドットパターンで印字された原稿を読み取り、読み取ったドットパターンの位置データに基づき、曲線近似処理を利用して原稿搬送ローラ107、108の偏芯ずれを取得する構成が開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2021-061563号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述の構成では、取得したドットパターンの座標間隔比を元に曲線近似することで搬送機構の偏芯影響を取得していた。原稿搬送ローラ107、108の偏芯ずれを高精度に取得して高精度に画像の読み取りを行うためには、より多くのドットパターンが印字された原稿を用いて、より多くのデータに基づいて曲線近似処理をすることが好ましい。しかし、ドットパターンとゴミとの読取り区別をするため、ドットパターンとしてある程度大きなパターンが必要であり、原稿に印字するパターンの数、すなわち曲線近似に用いるデータの数が制限されることがあった。
【0008】
上述の課題を鑑みて、本発明は画像を高精度に読み取ることができる画像読取装置を提
供することを目的とする。
【課題を解決するための手段】
【0009】
上述の目的を達成するため、本発明の画像読取装置は、
原稿を搬送方向に搬送する搬送ローラと、
前記搬送ローラにより搬送される原稿の画像を読み取る複数のラインイメージセンサと、
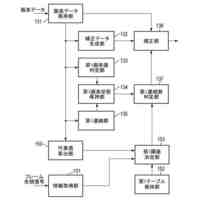
複数のドットパターンが前記搬送方向に配列されて構成される第1ドット列と第2ドット列が前記搬送方向と交差する幅方向の異なる位置に印刷されたチャートを読み取ることで取得した読取データに基づき、複数の前記ドットパターンの座標を取得する第1の取得手段と、
前記第1の取得手段により取得された前記座標に基づき、互いに隣接するドットパターンの座標間の距離を取得する第2の取得手段と、
前記第2の取得手段により取得された前記距離に基づき、前記ラインイメージセンサによる画像の読み取りのための補正値を取得する第3の取得手段と、
を備え、
前記チャートにおいて、前記第1ドット列のドットパターンと、前記第2ドット列のドットパターンは互いに前記搬送方向にずれて配置されており、
前記第3の取得手段は、前記第2の取得手段により取得された前記第1ドット列の前記搬送方向に互いに隣接するドットパターンの座標間の搬送方向距離と、前記第2ドット列の前記搬送方向に互いに隣接するドットパターンの座標間の搬送方向距離とに基づいて前記補正値を取得することを特徴とする。
【発明の効果】
【0010】
本発明によれば、画像を高精度に読み取ることができる画像読取装置を提供できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
記録装置
1日前
キヤノン株式会社
記録装置
1日前
キヤノン株式会社
記録装置
1日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像読取装置
1日前
キヤノン株式会社
モータ制御装置
1日前
キヤノン株式会社
記録装置及び制御方法
1日前
キヤノン株式会社
情報処理装置及び情報処理方法
1日前
キヤノン株式会社
平坦化装置、および物品製造方法
1日前
キヤノン株式会社
回路、発光デバイス、画像形成装置
1日前
キヤノン株式会社
光電変換装置及び光電変換システム
1日前
キヤノン株式会社
接合方法、接合システムおよび製造方法
1日前
キヤノン株式会社
プロセスカートリッジ及び電子写真装置
1日前
キヤノン株式会社
位置管理システム、方法、及び情報処理装置
1日前
キヤノン株式会社
液体吐出ヘッド、液体吐出ヘッドの製造方法
1日前
キヤノン株式会社
画像処理装置、画像処理方法及びプログラム
1日前
キヤノン株式会社
情報処理装置、情報処理方法、及びプログラム
1日前
キヤノン株式会社
情報処理装置、情報処理方法およびプログラム
1日前
キヤノン株式会社
除電装置、画像形成システム及び電荷調整装置
1日前
キヤノン株式会社
除電装置、画像形成システム及び電荷調整装置
1日前
キヤノン株式会社
除電装置、画像形成システム及び電荷調整装置
1日前
キヤノン株式会社
除電装置、画像形成システム及び電荷調整装置
1日前
キヤノン株式会社
情報処理装置、情報処理方法、及びプログラム
1日前
キヤノン株式会社
デバイス、デバイスの制御方法およびプログラム
1日前
キヤノン株式会社
記録装置、記録装置の吐出タイミングの調整方法
1日前
キヤノン株式会社
通信装置、通信装置の制御方法、及び、プログラム
1日前
キヤノン株式会社
通信装置、通信装置の制御方法、及び、プログラム
1日前
キヤノン株式会社
通信装置、通信装置の制御方法、及び、プログラム
1日前
キヤノン株式会社
露光装置、決定方法、物品の製造方法及びプログラム
1日前
キヤノン株式会社
画像表示制御装置、画像表示制御方法及びプログラム
1日前
キヤノン株式会社
情報処理装置、情報処理装置の制御方法およびプログラム
1日前
キヤノン株式会社
情報処理装置の制御方法、情報処理装置、及びプログラム
1日前
キヤノン株式会社
画像形成装置
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ