TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025110493
公報種別
公開特許公報(A)
公開日
2025-07-29
出願番号
2024004344
出願日
2024-01-16
発明の名称
船舶の推進システム、制御プログラムおよび制御方法
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
B63H
21/20 20060101AFI20250722BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】エンジンと電動発電機との何れによっても推進プロペラを駆動可能な船舶において、様々な状況で要求される推進力に対応しつつ環境負荷を低くすることができる船舶の推進システム、制御プログラムおよび制御方法を提供する。
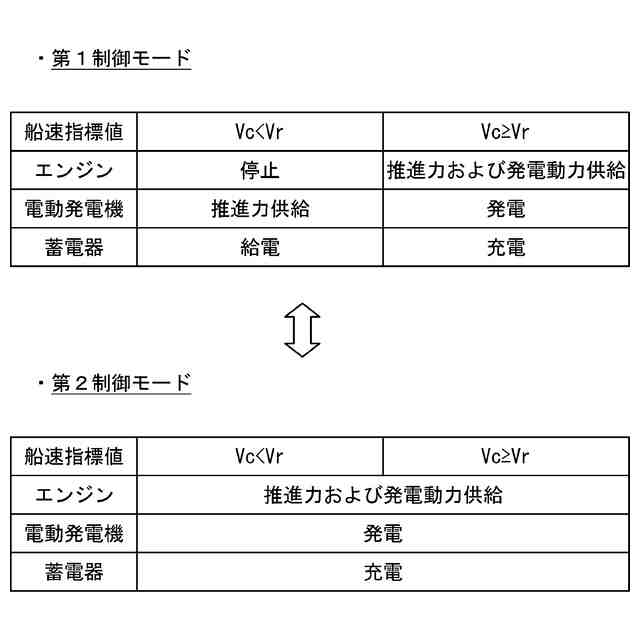
【解決手段】船舶の推進システムにおいて、制御器の処理回路は、第1制御モードと、第2制御モードとを切り替えて実行可能に構成され、第1制御モードにおいて、船速指標値が所定の基準値以上である場合にエンジンの出力により推進プロペラを駆動し、基準値未満である場合にエンジンを停止した状態で電動発電機の出力により推進プロペラを駆動し、第2制御モードにおいて、船速指標値にかかわらず、エンジンの回転数を所定回転数に維持するように制御し、当該エンジンの出力により推進プロペラを駆動し、エンジンの余剰出力を用いて電動発電機で発電するように電力変換器を制御する。
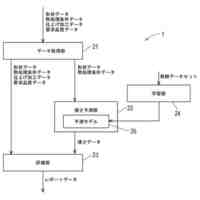
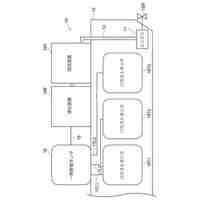
【選択図】図2
特許請求の範囲
【請求項1】
推進プロペラに機械的に接続されるエンジンと、
前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能かつ前記推進プロペラに動力伝達可能な電動発電機と、
前記電動発電機に電気的に接続される電力変換器と、
推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の推進システムであって、
前記制御器は、処理回路を含み、
前記処理回路は、
第1制御モードと、第2制御モードとを切り替えて実行可能に構成され、
前記第1制御モードにおいて、船速、前記推進力指令値または前記推進力指令値に基づく船速目標値を含む船速指標値を取得し、前記船速指標値が所定の基準値以上である場合に前記エンジンの出力により前記推進プロペラを駆動するように前記エンジンを制御し、前記基準値未満である場合に前記エンジンを停止した状態で前記電動発電機の出力により前記推進プロペラを駆動するように前記電力変換器を制御し、
前記第2制御モードにおいて、前記船速指標値にかかわらず、前記エンジンの回転数を所定回転数に維持するように制御し、当該エンジンの出力により前記推進プロペラを駆動し、前記推進力指令値から前記エンジンの回転数を前記所定回転数にするのに必要な推進力を差し引いた前記エンジンの余剰出力を用いて前記電動発電機で発電するように前記電力変換器を制御する、推進システム。
続きを表示(約 1,800 文字)
【請求項2】
前記第2制御モードの実行を開始するためのスイッチを備え、
前記処理回路は、前記スイッチへの操作入力に基づいて前記第2制御モードの実行を開始する、請求項1に記載の推進システム。
【請求項3】
前記処理回路は、
船舶の航行環境データを取得し、
取得した前記航行環境データが所定の条件を満たした場合に、前記第2制御モードの実行を開始する、請求項1または2に記載の推進システム。
【請求項4】
前記電動発電機で発電された電力により充電可能な蓄電器を備え、
前記処理回路は、
前記蓄電器の充電率データを取得し、
取得した前記充電率データの値が所定の基準値以下になった場合に、前記第2制御モードの実行を開始する、請求項1または2に記載の推進システム。
【請求項5】
前記処理回路は、前記第2制御モードにおいて、前記船速と前記船速目標値との差が所定値以上である場合、前記エンジンの前記所定回転数における出力に前記電動発電機の出力を加えた出力により前記推進プロペラを駆動する、請求項1または2に記載の推進システム。
【請求項6】
前記推進プロペラは、翼角を変更可能な可変ピッチプロペラであり、
前記処理回路は、
前記エンジンの回転数を前記所定回転数に維持するように前記エンジンを制御し、
前記推進力指令値に基づいて前記翼角を変更するように前記推進プロペラを制御する、請求項1または2に記載の推進システム。
【請求項7】
推進プロペラに機械的に接続されるエンジンと、
前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能かつ前記推進プロペラに動力伝達可能な電動発電機と、
前記電動発電機に電気的に接続される電力変換器と、
推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の制御プログラムであって、
前記制御プログラムは、前記制御器に、
船速、前記推進力指令値または前記推進力指令値に基づく船速目標値を含む船速指標値を取得し、前記船速指標値が所定の基準値以上である場合に前記エンジンの出力により前記推進プロペラを駆動するように前記エンジンを制御し、前記基準値未満である場合に前記エンジンを停止した状態で前記電動発電機の出力により前記推進プロペラを駆動するように前記電力変換器を制御する第1制御モードと、
前記船速指標値にかかわらず、前記エンジンの回転数を所定回転数に維持するように制御し、当該エンジンの出力により前記推進プロペラを駆動し、前記推進力指令値から前記エンジンの回転数を前記所定回転数にするのに必要な推進力を差し引いた前記エンジンの余剰出力を用いて前記電動発電機で発電するように前記電力変換器を制御する第2制御モードと、を切り替えて実行させる、制御プログラム。
【請求項8】
推進プロペラに機械的に接続されるエンジンと、
前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能かつ前記推進プロペラに動力伝達可能な電動発電機と、
前記電動発電機に電気的に接続される電力変換器と、
推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の制御方法であって、
船速、前記推進力指令値または前記推進力指令値に基づく船速目標値を含む船速指標値を取得し、前記船速指標値が所定の基準値以上である場合に前記エンジンの出力により前記推進プロペラを駆動するように前記エンジンを制御し、前記基準値未満である場合に前記エンジンを停止した状態で前記電動発電機の出力により前記推進プロペラを駆動するように前記電力変換器を制御する第1制御モードと、
前記船速指標値にかかわらず、前記エンジンの回転数を所定回転数に維持するように制御し、当該エンジンの出力により前記推進プロペラを駆動し、前記推進力指令値から前記エンジンの回転数を前記所定回転数にするのに必要な推進力を差し引いた前記エンジンの余剰出力を用いて前記電動発電機で発電するように前記電力変換器を制御する第2制御モードと、を切り替えて実行する、制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、船舶の推進システム、制御プログラムおよび制御方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
エンジンと電動発電機との何れによっても推進プロペラを駆動可能な船舶が知られている。例えば、下記特許文献1には、エンジンの駆動力のみを船舶の推進力とするエンジン推進モードと、エンジンの駆動力および電動発電機の駆動力を船舶の推進力とするハイブリッド推進モードとが選択的に実行される制御方法が記載されている。
【先行技術文献】
【特許文献】
【0003】
特許第7060491号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ただし、上記特許文献1のようなエンジンと電動発電機との何れによっても推進プロペラを駆動可能な船舶において、様々な状況で要求される推進力に対応しつつ環境負荷の低い船舶の推進システムを実現するには、改善の余地がある。
【0005】
本開示は上記に鑑みなされたものであり、エンジンと電動発電機との何れによっても推進プロペラを駆動可能な船舶において、様々な状況で要求される推進力に対応しつつ環境負荷を低くすることができる船舶の推進システム、制御プログラムおよび制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る推進システムは、推進プロペラに機械的に接続されるエンジンと、前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能かつ前記推進プロペラに動力伝達可能な電動発電機と、前記電動発電機に電気的に接続される電力変換器と、推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の推進システムであって、前記制御器は、処理回路を含み、前記処理回路は、第1制御モードと、第2制御モードとを切り替えて実行可能に構成され、前記第1制御モードにおいて、船速、前記推進力指令値または前記推進力指令値に基づく船速目標値を含む船速指標値を取得し、前記船速指標値が所定の基準値以上である場合に前記エンジンの出力により前記推進プロペラを駆動するように前記エンジンを制御し、前記基準値未満である場合に前記エンジンを停止した状態で前記電動発電機の出力により前記推進プロペラを駆動するように前記電力変換器を制御し、前記第2制御モードにおいて、前記船速指標値にかかわらず、前記エンジンの回転数を所定回転数に維持するように制御し、当該エンジンの出力により前記推進プロペラを駆動し、前記推進力指令値から前記エンジンの回転数を前記所定回転数にするのに必要な推進力を差し引いた前記エンジンの余剰出力を用いて前記電動発電機で発電するように前記電力変換器を制御する。
【0007】
本開示の他の態様に係る制御プログラムは、推進プロペラに機械的に接続されるエンジンと、前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能かつ前記推進プロペラに動力伝達可能な電動発電機と、前記電動発電機に電気的に接続される電力変換器と、推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の制御プログラムであって、前記制御プログラムは、前記制御器に、船速、前記推進力指令値または前記推進力指令値に基づく船速目標値を含む船速指標値を取得し、前記船速指標値が所定の基準値以上である場合に前記エンジンの出力により前記推進プロペラを駆動するように前記エンジンを制御し、前記基準値未満である場合に前記エンジンを停止した状態で前記電動発電機の出力により前記推進プロペラを駆動するように前記電力変換器を制御する第1制御モードと、前記船速指標値にかかわらず、前記エンジンの回転数を所定回転数に維持するように制御し、当該エンジンの出力により前記推進プロペラを駆動し、前記推進力指令値から前記エンジンの回転数を前記所定回転数にするのに必要な推進力を差し引いた前記エンジンの余剰出力を用いて前記電動発電機で発電するように前記電力変換器を制御する第2制御モードと、を切り替えて実行させる。
【0008】
本開示の他の態様に係る制御方法は、推進プロペラに機械的に接続されるエンジンと、前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能かつ前記推進プロペラに動力伝達可能な電動発電機と、前記電動発電機に電気的に接続される電力変換器と、推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の制御方法であって、船速、前記推進力指令値または前記推進力指令値に基づく船速目標値を含む船速指標値を取得し、前記船速指標値が所定の基準値以上である場合に前記エンジンの出力により前記推進プロペラを駆動するように前記エンジンを制御し、前記基準値未満である場合に前記エンジンを停止した状態で前記電動発電機の出力により前記推進プロペラを駆動するように前記電力変換器を制御する第1制御モードと、前記船速指標値にかかわらず、前記エンジンの回転数を所定回転数に維持するように制御し、当該エンジンの出力により前記推進プロペラを駆動し、前記推進力指令値から前記エンジンの回転数を前記所定回転数にするのに必要な推進力を差し引いた前記エンジンの余剰出力を用いて前記電動発電機で発電するように前記電力変換器を制御する第2制御モードと、を切り替えて実行する。
【発明の効果】
【0009】
本開示によれば、エンジンと電動発電機との何れによっても推進プロペラを駆動可能な船舶において、様々な状況で要求される推進力に対応しつつ環境負荷を低くすることができる。
【図面の簡単な説明】
【0010】
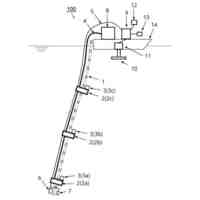
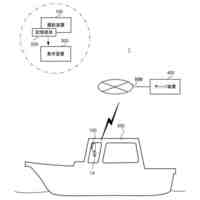
図1は、本開示の一実施の形態に係る船舶の推進システムの概略構成を示すブロック図である。
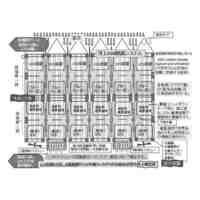
本実施の形態の第1制御モードおよび第2制御モードにおけるエンジン、電動発電機および蓄電器の船速指標値に応じた動作状態を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
大気中二酸化炭素分離回収設備
2日前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
2日前
個人
水上遊具
2か月前
個人
川下り用船
8か月前
個人
洋上研究所
12日前
個人
発電船
9か月前
個人
シーアンカー
10か月前
個人
船用横揺防止具
5か月前
個人
補助機構
4か月前
個人
コンパクトシティ船
4か月前
小柳建設株式会社
台船
11か月前
個人
渦流動力推進構造
4か月前
個人
セールのバテンガイド装置
24日前
個人
水質浄化・集熱昇温システム
1か月前
炎重工株式会社
浮標
6か月前
炎重工株式会社
浮標
6か月前
個人
水陸両用移動装置
11か月前
炎重工株式会社
移動体
9か月前
住友重機械工業株式会社
船舶
1か月前
株式会社ラフティ
サーフボード
1か月前
個人
船舶
6か月前
株式会社フルトン
水中捕捉装置
4か月前
個人
スクリュープロペラ
4か月前
オーケー工業株式会社
係留フック
5か月前
個人
回転式による流体流出防止タンカー
4か月前
株式会社テラサン
位置保持システム
10か月前
スズキ株式会社
船外機
4か月前
スズキ株式会社
船外機
4か月前
常石造船株式会社
メタノール燃料船
7か月前
スズキ株式会社
船外機
3か月前
ヤマハ発動機株式会社
船外機
6か月前
スズキ株式会社
船外機
3か月前
株式会社アカデミー出版
船舶
10日前
炎重工株式会社
自律航行浮遊体
6か月前
株式会社ユピテル
システム及びプログラム等
3か月前
株式会社神戸タフ興産
船舶の甲板構造
8か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ